一种探针机构、机器人手术系统及其配准点获取方法与流程
本发明涉及医疗,尤其涉及一种探针机构、机器人手术系统及其配准点获取方法。
背景技术:
1、随着科学技术的发展,手术导航和医疗机器人技术得到了快速发展,手术导航和医疗机器人辅助手术系统已被广泛研究和应用,以改善手术过程中的精度、减少手术创伤、缩短手术时间和提高手术安全性。
2、在膝关节手术过程中,通常采用带有标记球的探针对膝关节坐标系与手术系统的坐标系进行耦合或校准。在操作过程中,首先,将探针的尖端刺入软骨,实现探针的定位;然后采用摄像头对探针上的多个标记球进行位置识别,从而对探针尖端坐标位置进行识别。
3、现有技术中通常采用单探针对配准点进行采集,导致需要进行多次数据采集才能完成探针与手术系统的耦合,操作繁琐,效率较低,影响手术效率和手术操作的便利性。
技术实现思路
1、本发明的一个目的在于提供一种探针机构,其能够提高探针机构的配准效率效率和准确性,提高探针机构的使用可靠性。
2、本发明的另一个目的在于提供一种机器人手术系统,其能够提高机器人手术系统的配准效率和配准精度,且减少因配准造成的损伤,提高手术安全性。
3、本发明的又一目的在于提供一种机器人手术系统的配准点获取方法,其能够提高配准效率和配准精度。
4、为实现上述目的,本发明采用下述技术方案:
5、一种探针机构,包括:
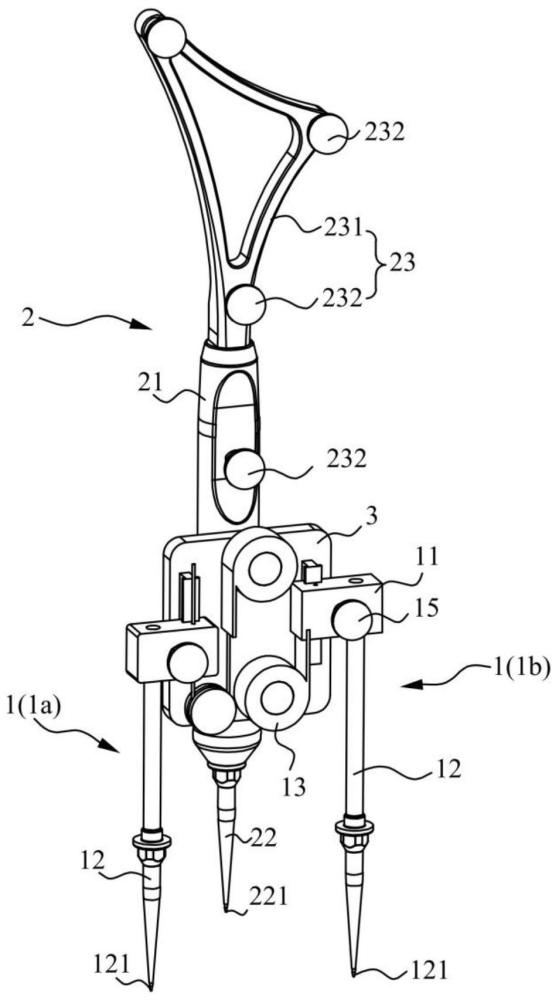
6、固定探针组件,包括固定针座、安装于所述固定针座的主探针及安装于所述固定针座的导航组件,所述主探针沿第一方向延伸且具有主尖端,所述导航组件包括多个间隔设置的主示踪件;
7、活动探针组件,包括滑动针座、恒力弹簧及辅助探针,所述滑动针座能沿所述第一方向滑动地安装于所述固定针座,所述辅助探针沿所述第一方向延伸具有辅尖端,所述滑动针座上设置有辅示踪件,所述恒力弹簧安装于所述固定针座且所述恒力弹簧的受力端与所述滑动针座连接;
8、在初始状态下,所述辅尖端在所述第一方向上相对所述主尖端伸出。
9、作为一种探针机构的可选技术方案,所述探针机构还包括安装基座,所述安装基座安装于所述固定针座,所述活动探针组件安装于所述安装基座。
10、作为一种探针机构的可选技术方案,所述安装基座包括安装基板,所述安装基板与所述第一方向平行,所述活动探针组件均安装于所述安装基板远离所述固定针座的一侧;
11、或,所述安装基座包括安装套筒,所述安装套筒套设在所述固定针座的外侧,所述活动探针组件安装于所述安装套筒的外侧并沿所述安装套筒的周向间隔设置有多个。
12、作为一种探针机构的可选技术方案,至少部分所述活动探针组件为第一活动探针组件,所述第一活动探针组件还包括传力单元,所述传力单元连接于所述恒力弹簧的受力端和所述滑动针座之间,所述传力单元用于传递所述滑动针座和所述恒力弹簧之间的牵引力。
13、作为一种探针机构的可选技术方案,所述传力单元包括导向轮和连接绳,所述导向轮转动安装于所述安装基座上,所述连接绳绕设于所述导向轮,且所述连接绳的一端与所述恒力弹簧的受力端连接,所述连接绳的另一端与所述滑动针座连接。
14、作为一种探针机构的可选技术方案,相邻两组活动探针组件中,其中一所述活动探针组件为第一活动探针组件,且两个所述恒力弹簧在所述第一方向上间隔设置,两个所述恒力弹簧位于两个所述滑动针座之间。
15、作为一种探针机构的可选技术方案,在所述初始状态下,所述主尖端与所述辅尖端在所述第一方向上的间距为15mm~40mm;
16、和/或,所述活动探针组件的数量为2~20个。
17、一种机器人手术系统,包括传感器系统和控制系统,包括如上所述的探针机构。
18、一种机器人手术系统的配准点获取方法,应用于如上的机器人手术系统,所述传感器系统具有传感器坐标系,所述探针机构具有探针坐标系,所述配准点获取方法包括:
19、控制所述探针机构移动至被测物体处,并使所述主尖端及至少部分所述辅尖端接触所述被测物体;
20、所述传感器系统识别所有所述主示踪件在所述传感器坐标系中的绝对位置坐标;
21、根据所述绝对位置坐标及所有所述主示踪件在所述探针坐标系中的相对位置坐标,计算所述探针坐标系至所述传感器坐标系的坐标转换矩阵;
22、根据所述主尖端在所述探针坐标系中相对所述主示踪件的位置,计算得到所述主尖端在所述探针坐标系中的主尖端相对坐标;
23、对每个活动探针组件,所述传感器系统识别所述辅示踪件相对所述主示踪件的示踪相对位置;所述控制系统根据所述示踪相对位置,计算所述辅示踪件在所述探针坐标系中的辅示踪相对坐标;根据所述辅示踪件和对应所述辅尖端的相对位置,计算所述辅尖端在所述探针坐标系中的辅尖端相对坐标;
24、所述控制系统根据所述坐标转换矩阵将主尖端相对坐标转换为所述传感器坐标系下的主尖端绝对坐标,并将所述辅尖端相对坐标转换为所述传感器坐标系下的辅尖端绝对坐标;
25、将所述主尖端绝对坐标和若干所述辅尖端绝对坐标作为配准坐标进行配准。
26、作为一种配准点获取方法的可选技术方案,所述配准点获取方法还包括:
27、对每个所述活动探针组件,在计算获得所述辅尖端的辅尖端相对坐标后,将所述辅尖端相对坐标与所述辅尖端在初始状态时的辅尖端初始坐标进行比对;
28、若所述辅尖端初始坐标与所述辅尖端相对坐标的差值小于预设差值,则将所述辅尖端对应的所述辅尖端相对坐标判定为无效坐标以排除配准。
29、本发明的有益效果在于:
30、本发明提供的探针机构,通过设置主探针和若干个辅助探针,使得在探针机构在使用过程中,探针机构的主尖端和辅尖端均可与被测物体接触,进而在一次接触中实现多个配准点的采集,极大地提高了配准的速度和效率;同时,由于在初始状态下,辅尖端在第一方向上相对主尖端伸出,使得主尖端接触被测物体时,辅尖端同样能够与被测物体接触,保证辅尖端和主尖端接触被测物体的可靠性,且能够较好地适用具有非平面被测部分的被测物体的接触及配准,提高探针机构的使用灵活性和使用准确性;再者,由于辅助探针的滑动针座连接恒力弹簧的受力端,使得辅助探针在接触被测物体时,随着主探针向下接触被测物体,辅助探针能够相对主探针滑动的同时,辅尖端刺破软骨的刺破力不会随着恒力弹簧的压缩或者拉伸变化而变化,保证辅尖端刺破软骨的力保持恒力,从而在保证主尖端和辅尖端能够有效达到骨面的同时,避免辅尖端穿破皮质骨,减少手术风险和并发症发生的概率,提高手术安全性。
31、本发明提供的手术机器人系统,通过采用上述的探针机构,能够提高手术机器人系统的配准效率和配准准确性,从而提高手术效率和手术安全性。
32、本发明提供的手术机器人系统的配准点获取方法,通过采用上述手术机器人系统,能够提高配准的效率和配准精度。
技术特征:
1.一种探针机构,其特征在于,包括:
2.根据权利要求1所述的探针机构,其特征在于,所述探针机构还包括安装基座(3),所述安装基座(3)安装于所述固定针座(21),所述活动探针组件(1)安装于所述安装基座(3)。
3.根据权利要求2所述的探针机构,其特征在于,所述安装基座(3)包括安装基板(31),所述安装基板(31)与所述第一方向平行,所述活动探针组件(1)均安装于所述安装基板(31)远离所述固定针座(21)的一侧;
4.根据权利要求2所述的探针机构,其特征在于,至少部分所述活动探针组件(1)为第一活动探针组件(1a),所述第一活动探针组件(1a)还包括传力单元(16),所述传力单元(16)连接于所述恒力弹簧(13)的受力端和所述滑动针座(11)之间,所述传力单元(16)用于传递所述滑动针座(11)和所述恒力弹簧(13)之间的牵引力。
5.根据权利要求4所述的探针机构,其特征在于,所述传力单元(16)包括导向轮(161)和连接绳(162),所述导向轮(161)转动安装于所述安装基座(3)上,所述连接绳(162)绕设于所述导向轮(161),且所述连接绳(162)的一端与所述恒力弹簧(13)的受力端连接,所述连接绳(162)的另一端与所述滑动针座(11)连接。
6.根据权利要求4所述的探针机构,其特征在于,相邻两组活动探针组件(1)中,其中一所述活动探针组件(1)为第一活动探针组件(1a),且两个所述恒力弹簧(13)在所述第一方向上间隔设置,两个所述恒力弹簧(13)位于两个所述滑动针座(11)之间。
7.根据权利要求1-6任一项所述的探针机构,其特征在于,在所述初始状态下,所述主尖端(221)与所述辅尖端(121)在所述第一方向上的间距为15mm~40mm;
8.一种机器人手术系统,包括传感器系统和控制系统,其特征在于,包括如权利要求1-7任一项所述的探针机构。
9.一种机器人手术系统的配准点获取方法,其特征在于,应用于如权利要求8所述的机器人手术系统,所述传感器系统具有传感器坐标系,所述探针机构具有探针坐标系,所述配准点获取方法包括:
10.根据权利要求9所述的配准点获取方法,其特征在于,所述配准点获取方法还包括:
技术总结
本发明属于医疗技术领域,具体公开了一种探针机构、机器人手术系统及其配准点获取方法。探针机构包括固定探针组件和活动探针组件,固定探针组件包括固定针座、主探针及导航组件,主探针沿第一方向延伸且具有主尖端,导航组件包括多个间隔设置的主示踪件;活动探针组件包括滑动针座、恒力弹簧及辅助探针,滑动针座能沿第一方向滑动地安装于固定针座,辅助探针沿第一方向延伸具有辅尖端,滑动针座上设置有辅示踪件,恒力弹簧安装于固定针座且恒力弹簧的受力端与滑动针座连接;在初始状态下,辅尖端在第一方向上相对主尖端伸出。本发明可以通过一次接触实现多个配准点的获取,提高配准效率,且提高配准精度和手术安全性。
技术研发人员:佟辉,张东东,麻启哲,刘妙,王凤昕,郭振东,马赫
受保护的技术使用者:北京威高智慧科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!