一种可视化约束下内窥镜手术机器人安全控制系统及方法
本发明属于医疗机器人,具体涉及一种可视化约束下内窥镜手术机器人安全控制系统及方法。
背景技术:
1、内窥镜手术机器人是一种很新型的医疗技术,它可以通过自然孔洞或者人工创口进入人体,实现手术的自动化操作,在诊断上使得对患处的观察更加直观。在手术操作上,这种技术的出现与应用提升了传统手术的准确性与效率,通过内窥镜能够很直接的减少手术过程中的出血与组织损伤,也能够缩短患者的恢复时间。能够解决在传统的开放式手术中,手术切口大,创口易感染,在手术过程中易发生其他并发症的问题。
2、在临床的手术中,高效且准确无误的完成手术对医生与患者来说都极为重要,对于内窥镜在实际的使用中,需要手眼并用,精神高度集中,多次的手术难免会带来精神疲劳的问题,导致目标的丢失,这会使手术风险大大提高。
3、为了提高内窥镜手术机器人在操作时的精度,降低手术过程中的使用风险,本专利提出一种更为有效的内窥镜手术机器人的遥操作控制方法,旨在解决内窥镜使用时目标丢失的问题,提升内窥镜手术机器人在使用中的稳定性,使内窥镜手术更加便于实施。
技术实现思路
1、本发明旨在解决现有技术的不足,提出一种可视化约束下内窥镜手术机器人安全控制系统,,能够提升内窥镜手术机器人的进行遥操作控制的稳定性,降低目标丢失的概率。
2、为实现上述目的,本发明提供了如下方案:
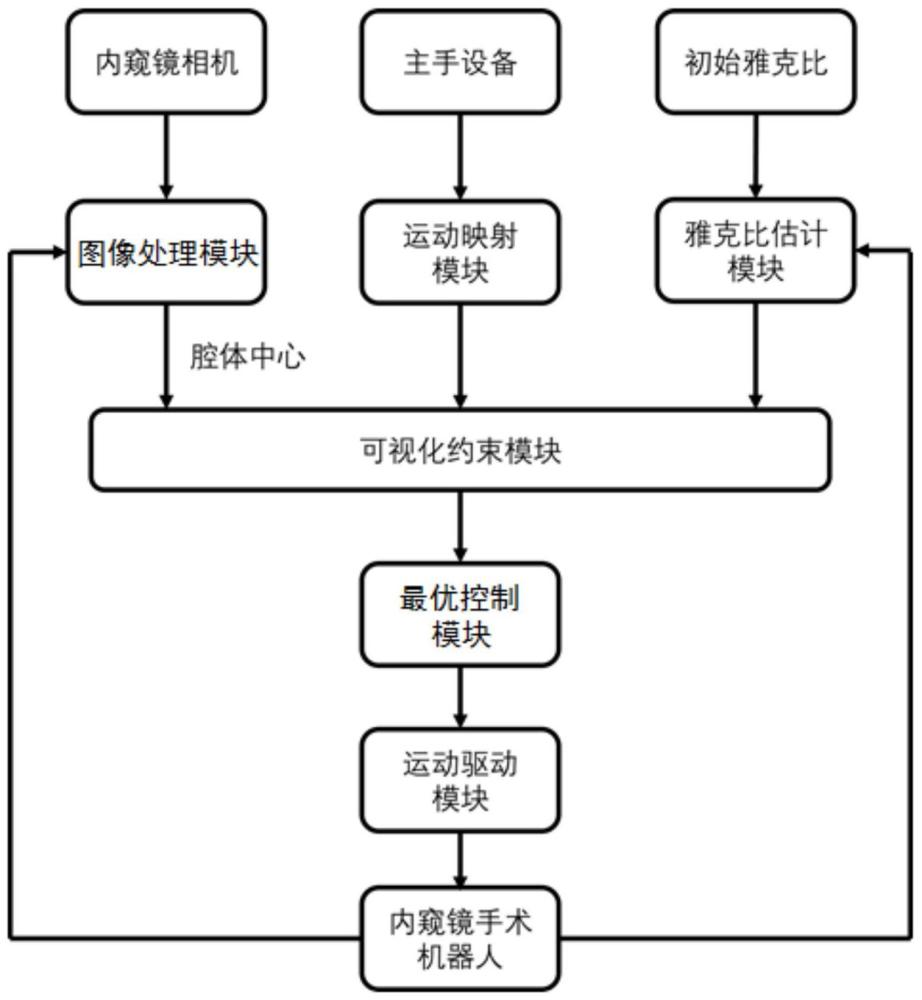
3、一种可视化约束下内窥镜手术机器人安全控制系统,包括:图像处理模块、运动映射模块、雅可比估计模块、可视化约束模块、最优控制模块和运动驱动模块;
4、所述图像处理模块用于采集人体的腔体图像,并基于所述人体腔道图像计算腔体中心;
5、所述运动映射模块用于读取主手设备的运动数据,并将所述运动数据映射为手术机器人关节的期望速度;
6、所述雅可比估计模块用于基于所述腔体中心计算控制过程中所述手术机器人的雅可比矩阵变化量;
7、所述可视化约束模块用于基于所述腔体中心构建控制障碍函数,并基于所述雅可比矩阵设置所述控制障碍函数的约束条件;
8、所述最优控制模块用于基于所述期望速度和所述控制障碍函数得到关节的最优控制量;
9、所述运动驱动模块用于基于所述最优控制量控制所述手术机器人。
10、优选的,所述图像处理模块包括:图像采集单元和图像处理单元;
11、所述图像采集单元用于采集所述腔体图像;
12、所述图像处理单元用于分割所述腔体图像中的腔体轮廓,并提取所述腔体轮廓的最大内切圆,以所述最大内切圆的圆心作为所述腔体中心(u,v)。
13、优选的,所述运动映射模块包括:数值采集单元和数据映射单元;
14、所述数值采集单元用于采集主手设备的所述运动数据;
15、所述数据映射单元用于将所述运动数据按照预设比例进行映射,得到手术机器人关节的所述期望速度
16、所述期望速度包括旋转关节期望速度和弯曲关节期望速度,其中,所述旋转关节期望速度为所述弯曲关节期望速度为
17、优选的,所述雅可比估计模块包括:变化量计算模块和矩阵计算模块;
18、所述变化量计算模块用于获取所述腔体图像的中心位置[u0,v0]和所述腔体中心的t时刻实时位置[ut,vt],基于所述中心位置和所述t时刻实时位置计算期望速度变化量
19、所述矩阵计算模块用于获取所述腔体中心的t-1时刻实时位置[ut-1,vt-1],基于所述t-1时刻实时位置和所述期望速度变化量得到所述雅可比矩阵变化量δj。
20、优选的,所述可视化约束模块包括:函数建立模块和约束设置模块;
21、所述函数建立模块用于构建所述控制障碍函数b(u,v)=ρ2-u2-v2;
22、所述约束设置模块用于设置所述约束条件:
23、b(1)≥-kbb
24、
25、
26、
27、其中,为旋转关节速度,为弯曲关节速度,是旋转的角度,θ为弯曲的角度,是像素平面上点在水平方向与竖直方向上的速度,j0为初始的雅克比,b(1)是控制障碍函数的一阶导数,kb是比例常数。
28、优选的,所述最优控制模块的工作流程包括:
29、求解内窥镜手术机器人在最小时的旋转关节速度和弯曲关节速度即所述最优控制量。
30、优选的,所述运动驱动模块的工作流程包括:
31、将所述最优控制量发送至所述手术机器人中进行电机驱动,以调整所述内窥镜末端姿态。
32、本发明还提供了一种可视化约束下内窥镜手术机器人安全控制方法,所述方法应用于上述任一项所述的系统,其特征在于,包括以下步骤:
33、采集人体的腔体图像,并基于所述人体腔道图像计算腔体中心;
34、读取主手设备的运动数据,并将所述运动数据映射为手术机器人关节的期望速度;
35、基于所述腔体中心计算控制过程中所述手术机器人的雅可比矩阵;
36、基于所述腔体中心构建控制障碍函数,并基于所述雅可比矩阵变化量设置所述控制障碍函数的约束条件;
37、基于所述期望速度和所述控制障碍函数得到关节的最优控制量;
38、基于所述最优控制量控制所述手术机器人。
39、与现有技术相比,本发明的有益效果为:
40、本发明创新性的提出以遥操作的方式来控制柔性内窥镜,能够降低内窥镜使用的难度,具有高精度,更稳定的优势,在使用上对医生的培训成本降低,而且抗干扰能力强,有助于提高内窥镜检查术的手术稳定性。
技术特征:
1.一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,包括:图像处理模块、运动映射模块、雅可比估计模块、可视化约束模块、最优控制模块和运动驱动模块;
2.根据权利要求1所述一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,所述图像处理模块包括:图像采集单元和图像处理单元;
3.根据权利要求1所述一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,所述运动映射模块包括:数值采集单元和数据映射单元;
4.根据权利要求1所述一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,所述雅可比估计模块包括:变化量计算模块和矩阵计算模块;
5.根据权利要求1所述一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,所述可视化约束模块包括:函数建立模块和约束设置模块;
6.根据权利要求1所述一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,所述最优控制模块的工作流程包括:
7.根据权利要求1所述一种可视化约束下内窥镜手术机器人安全控制系统,其特征在于,所述运动驱动模块的工作流程包括:
8.一种可视化约束下内窥镜手术机器人安全控制方法,所述方法应用于权利要求1-7任一项所述的系统,其特征在于,包括以下步骤:
技术总结
本发明公开了一种可视化约束下内窥镜手术机器人安全控制系统及方法,系统包括:图像处理模块、运动映射模块、雅可比估计模块、可视化约束模块、最优控制模块和运动驱动模块;图像处理模块用于采集人体的腔体图像,并基于人体腔道图像计算腔体中心;运动映射模块用于读取主手设备的运动数据,并将运动数据映射为手术机器人关节的期望速度;雅可比估计模块用于基于腔体中心计算控制过程中手术机器人的雅可比矩阵变化量;可视化约束模块用于基于腔体中心构建控制障碍函数,并基于雅可比矩阵变化量设置控制障碍函数的约束条件;最优控制模块用于基于期望速度和控制障碍函数得到关节的最优控制量;运动驱动模块用于基于最优控制量控制手术机器人。
技术研发人员:邓震,何帅,魏肖肖,潘川川,何炳蔚,吴洁
受保护的技术使用者:福州大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!