一种医疗介入器件的测距装置、系统和存储介质的制作方法
本申请涉及介入手术机器人控制,具体涉及一种医疗介入器件的测距装置、系统和存储介质。
背景技术:
1、心脑血管介入手术是针对心脑血管疾病的主要治疗手段,和传统外科手术相比,有着切口小、术后恢复时间短等明显优势。医生通过介入手术机器人将导管、导丝以及支架等器械送入病人的血管病变位置,在推送导管、导丝等器械进入血管病变位置之前,需要知道血管病变长度等距离信息。然而,目前医生主要是通过人工估算手动推进导丝或导管等器械在血管中移动的距离,来判断血管病变长度。
2、但是,医生在推进导丝或导管等器械在血管中移动时,有可能出现打滑等问题,导致导丝或导管等器械的实际移动距离与人为估算出的移动距离相差较大,医生无法获得在术中的导丝或导管等器械的实际移动距离。由于无法准确地获得血管病变长度,则无法准确地选择出血管病变相匹配的支架等耗材,并且无法确定出最佳的治疗方案,影响手术效果。
技术实现思路
1、提供本申请以解决现有技术中存在的上述问题。需要一种医疗介入器件的测距装置、系统和存储介质,其能够对术中的医疗介入器件在血管中的实际移动距离进行自动测量,为医生提供准确的术中的血管内有关距离测量的参数数据,以提高介入手术的准确性。
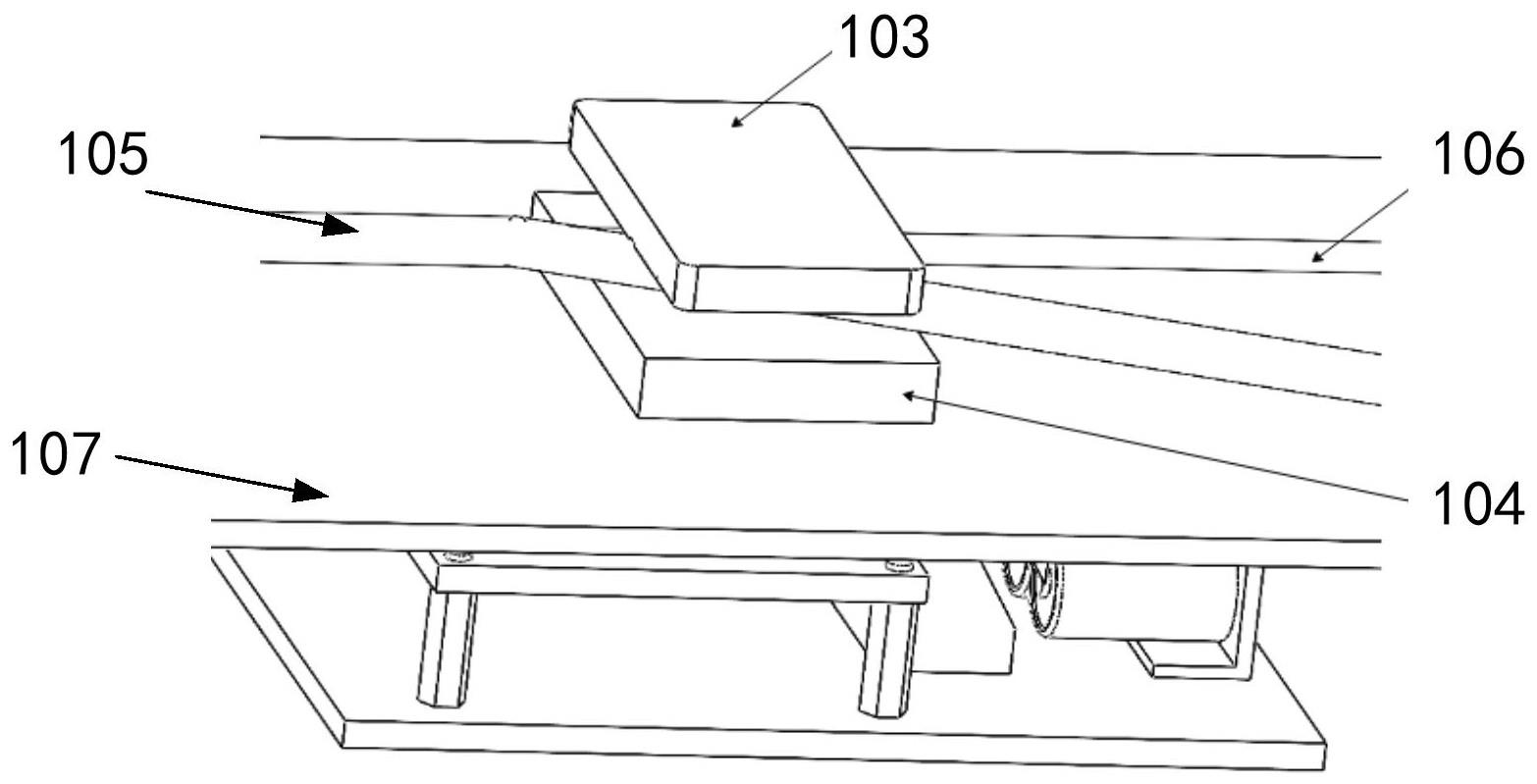
2、根据本申请的第一方案,提供一种医疗介入器件的测距装置,所述测距装置包括用于容纳和输送所述医疗介入器件的无菌盒内设置的第一组件和所述无菌盒的底板下方的推进机构的容纳腔内的第二组件,其中所述第一组件包括设置在所述底板上的透明的第一支撑件和上方的遮光板,所述第一支撑件用于支撑所述医疗介入器件,所述遮光板上设置有刻度标记;所述第二组件包括激光发射器、透镜组件、图像传感器和处理器,所述激光发射器配置为发射激光光束以传输到所述遮光板,被所述遮光板反射回的激光光束,经由所述透镜组件而入射到图像传感器,从而所述图像传感器采集到体现所容纳的医疗介入器件相对于所述刻度标记的图像,所述处理器被配置为:在所述医疗介入器件经由所述无菌盒传输的过程中,基于由所述图像传感器采集的第一时刻和第二时刻的图像,来确定所述医疗介入器件在所述第一时刻和所述第二时刻之间的移动距离。
3、根据本申请的第二方案,提供一种介入手术机器人系统,包括以可通信方式连接的从端的介入手术机器人和本申请各个实施例所述的测距装置,介入手术机器人响应于用户操纵,操纵医疗介入器件在血管中移动;所述介入手术机器人系统配置为:通过所述测距装置,确定出所述医疗介入器件在血管中的移动距离。
4、根据本申请的第三方案,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行本申请各个实施例所述的医疗介入器件的测距装置中的处理器执行的步骤。
5、与现有技术相比,本申请实施例的有益效果在于:
6、本申请实施例提供的测距装置,通过无菌盒和推进机构的配合,实现对医疗介入器件的推送、旋转等操作。医疗介入器件放置在无菌盒上,因为无菌盒为经过环氧乙烷灭菌的一次性使用耗材,能起到手术室内要求无菌的效果。在医疗介入器件在血管中移动的过程中,测距装置能够检测出医疗介入器件在血管中的实际移动距离。该测距装置通过激光发射器发射激光光束照射到医疗介入器件,遮光板反射激光光束经由透镜组件后入射到图像传感器。
7、图像传感器采集各个时刻的图像,通过对各个时刻的图像进行对比分析,能够计算出医疗介入器件在血管中的实际移动距离,并将实际移动距离的结果显示在显示界面上,以便于医生查看,解决了医生对医疗介入器件在血管内的实际移动距离估算不准确的问题,可以有效指导介入手术的操作。
8、该测距装置采用非接触式的测量方法,不会干扰到医疗介入器件的移动和旋转动作,不会对手术操作有影响。该测距装置的整体结构简单,体积小、重量轻,可以和无菌盒配合,有效解决了介入手术机器人消毒困难的问题,方便临床使用。
9、上述的一般描述和以下的详细描述只是示例性和说明性的,并不旨在限制要求保护的发明。
技术特征:
1.一种医疗介入器件的测距装置,其特征在于,所述测距装置包括用于容纳和输送所述医疗介入器件的无菌盒内设置的第一组件和所述无菌盒的底板下方的推进机构的容纳腔内的第二组件,其中
2.根据权利要求1所述的测距装置,其特征在于,所述遮光板上设置有预设组倾斜方向不同的带有刻度标记的刻度尺,所述刻度尺的倾斜方向与医疗介入器件位于所述第一支撑件上的倾斜方向相符。
3.根据权利要求1所述的测距装置,其特征在于,所述第二组件包括用于固定所述透镜组件的第二支撑件和用于固定所述激光发射器的第三支撑件;
4.根据权利要求1所述的测距装置,其特征在于,所述透镜组件包括至少一个凸透镜,所述凸透镜被设置在所述图像传感器的正上方,以使得所述图像传感器能够采集经由凸透镜放大后的第一时刻和第二时刻的图像,并将所述图像传输至所述处理器。
5.根据权利要求1所述的测距装置,其特征在于,所述测距装置包括电路板,所述电路板上安装有处理器。
6.根据权利要求1-5任一项所述的测距装置,其特征在于,所述测距装置包括固定板,所述固定板上安装有电路板、第二支撑件和第三支撑件,且位于所述推进机构的容纳腔内。
7.根据权利要求1-5任一项所述的测距装置,其特征在于,医疗介入器件包括导丝和/或导管,所述导管为球囊导管或支架导管。
8.一种介入手术机器人系统,其特征在于,包括以可通信方式连接的从端的介入手术机器人和权利要求1-4任一项所述的测距装置,介入手术机器人响应于用户操纵,操纵医疗介入器件在血管中移动;
9.根据权利要求8所述的介入手术机器人系统,其特征在于,所述介入手术机器人系统还包括显示器,所述显示器配置为:实时显示所述医疗介入器件在所述血管中的移动距离。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1所述的医疗介入器件的测距装置中的处理器执行的步骤。
技术总结
本申请涉及一种医疗介入器件的测距装置、系统和存储介质。所述测距装置包括第一组件和第二组件,其中第一组件包括第一支撑件和上方的遮光板,第一支撑件用于支撑所述医疗介入器件,遮光板上设置有刻度标记;第二组件包括激光发射器、透镜组件、图像传感器和处理器,激光发射器配置为发射激光光束以传输到遮光板,被遮光板反射回的激光光束,经由透镜组件而入射到图像传感器,处理器被配置为:在医疗介入器件经由无菌盒传输的过程中,基于由图像传感器采集的图像,来确定医疗介入器件的移动距离。如此,能够对术中的医疗介入器件在血管中的实际移动距离进行测量,为医生提供准确的术中的血管内有关距离测量的参数数据。
技术研发人员:黄韬
受保护的技术使用者:北京唯迈医疗设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!