一种叉指电极压电叠堆驱动器建模及指尖应力计算方法与流程
本发明属于压电材料,特别是涉及一种用于叉指电极型压电叠堆驱动器的建模和指尖应力计算方法。
背景技术:
1、压电材料是一种可以实现电能和机械能之间转换的智能材料,基于层积式压电陶瓷片的压电叠堆驱动器充分利用压电陶瓷的高功率密度,具有体积小,频响高及输出力大等特点,广泛应用于能源、电子、光学、生物医学、航空航天等诸多领域。叉指电极是指在压电叠堆每层陶瓷片上下表面布置的交叉排列的异性分支电极,每层电极的指尖端有少量的尺寸缩进,电极分布形状犹如手指交叉,而缩进部分通常由统一的惰性压电陶瓷填充。这一结构特性使得压电叠堆驱动器在工作过程中,叉指电极指尖与惰性陶瓷交界处易产生应力集中现象,当最大应力集中值大于材料许用应力时,可能导致压电叠堆内部局部位置出现裂纹损伤,最终造成电击穿等故障,严重影响压电叠堆驱动器的可靠性。准确预估叉指电极指尖的应力集中值,对叉指电极压电叠堆驱动器的结构优化、性能预测以及可靠性设计等具有重要指导意义。
2、由于叉指电极的指尖位于压电叠堆内部,无法通过试验对该处应力大小进行测量,且叉指电极压电叠堆属于微米级层积式结构,同时又受到机-电耦合效应的影响,固也难以通过解析式推导的方式对指尖应力进行计算。现有技术中多以三维有限元仿真来分析叠堆的内部应力,但多数研究集中在分析压电陶瓷片上的应力水平,通常忽略电极层的影响,更无法反映指尖应力水平。主要原因在于叉指电极压电叠堆驱动器的微观结构通常涉及上百层微米级压电陶瓷片和附属电极,且每两层相邻陶瓷片的材料极化方向相反,每相邻两层电极片的电场相异,无论是在建立几何模型还是设置材料属性和电学边界条件,采用常规的cae手段建模都十分困难。
技术实现思路
1、发明目的:提供一种叉指电极压电叠堆驱动器建模以及电极指尖应力计算方法,可以建立高仿真度的叉指电极压电叠堆驱动器微观结构模型,并可计算提取叉指电极指尖的最大应力集中值,为叉指电极型压电叠堆驱动器的构型优化、可靠性设计以及性能预测等提供一种新的分析手段。
2、技术方案:
3、一种叉指电极压电叠堆驱动器建模及指尖应力计算方法,所述方法包括以下步骤:
4、步骤一:建立叉指电极压电叠堆驱动器几何模型;
5、步骤二:为几何模型设置材料属性;
6、步骤三:为几何模型设置边界条件;
7、步骤四:对几何模型进行网格划分并进行指尖应力计算。
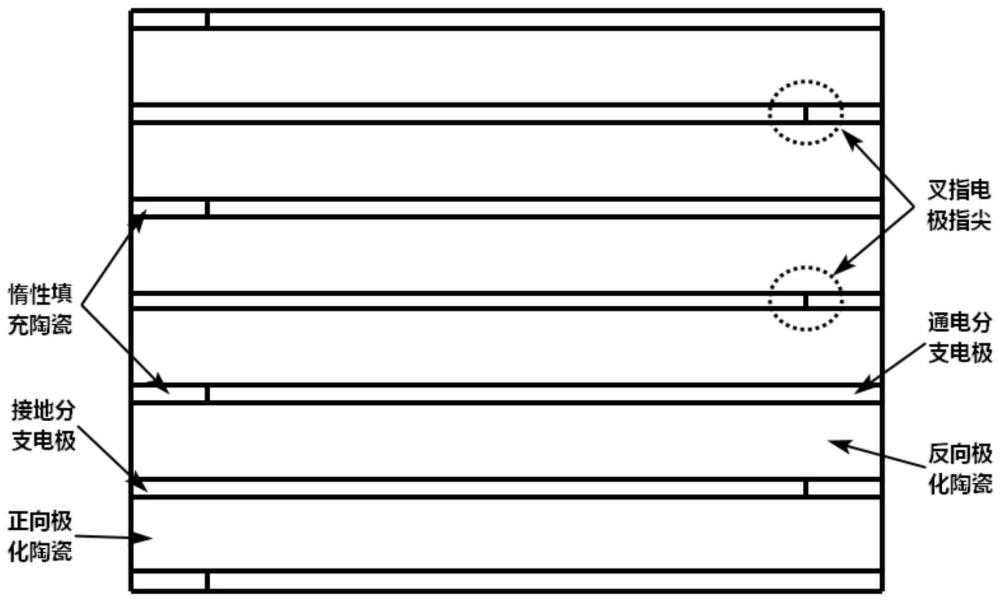
8、进一步,几何模型包括:n+1层电极、n层活性陶瓷和n+1层惰性陶瓷;
9、n层活性陶瓷的长宽厚均相等,按数量对半分为正向极化陶瓷和反向极化陶瓷且间隔分布;
10、一层电极和一层惰性陶瓷组成电极层;电极和惰性陶瓷的长度与活性陶瓷层相等,宽度之和与活性陶瓷层相等,惰性陶瓷宽度与活性陶瓷层宽度之比为5%~10%;
11、n层活性陶瓷设置在n+1层电极层之间;n+1层电极层中n/2层为通电分支电极,n/2+1为接地分支电极;
12、活性陶瓷厚度t1、电极层厚度t2。
13、进一步,所述步骤二中,为正向极化陶瓷赋予正向极化材料坐标系;为反向极化陶瓷赋予反向极化材料坐标系;
14、惰性填充陶瓷不设置极化坐标系;
15、为正向极化陶瓷、反向极化陶瓷和惰性填充陶瓷设置材料属性;
16、为电极设置材料属性。
17、进一步,所述正向极化坐标系包括相互垂直的x/y/z轴;x/y轴在活性陶瓷层水平面内,z向垂直与活性陶瓷层水平面向上;
18、所述反向极化坐标系包括相互垂直的x/y/z’轴;x/y轴在活性陶瓷层水平面内,z’向垂直与活性陶瓷层水平面向下。
19、进一步,所述步骤三中,为通电分支电极施加电势u,为接地分支电极施加电势0;
20、在电极与惰性填充陶瓷之间设置理想气体作为介电屏蔽边界;
21、在几何模型的最上层和最下层设置固支-自由或固支-固支力学边界约束。
22、进一步,所述理想气体的介电常数小于2,重量和体积可忽略不计;
23、所述固支-自由、固支-固支力学边界对应驱动器自由驱动、阻塞驱动两种工作状态。
24、进一步,所述步骤四中,指尖应力计算过程如下:
25、采用结构化六面体网格对几何模型进行网格划分;
26、为模型中的活性陶瓷赋予机-电耦合关系式如下:
27、
28、式中:第一个方程为逆压电效应方程,第二个方程为正压电效应方程。下标i,j=1,2,3对应压电材料坐标系中的三个极化方向,p,q=1,2,…,6是材料的不同应力应变方向,表示在恒定电场下的柔度系数矩阵,dip表示电极短路时压电应变常数矩阵,表示恒定应力下的介电常数矩阵,dpi表示零应力下的压电电压常数矩阵,ei、ej为电场向量,σq和σp为应力向量,sp和di分别为应变位移和电位移向量;
29、采用有限单元法或借助分析软件计算出x/y/z三个方向的主应力σx、σy、σz。
30、一种叉指电极压电叠堆驱动器,通过所述的叉指电极压电叠堆驱动器建模以及电极指尖应力计算方法设计得到。
31、有益效果:一种叉指电极压电叠堆驱动器建模以及电极指尖应力计算方法,通过将叉指电极压电叠堆驱动器划分为五个模块进行几何建模、设置材料属性以及边界条件,极大地降低了建模强度;通过引入理想气体对叉指电极指尖与惰性陶瓷进行介电屏蔽,提高了模型的仿真度和指尖应力计算的准确性。
技术特征:
1.一种叉指电极压电叠堆驱动器建模及指尖应力计算方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于:几何模型包括:n+1层电极、n层活性陶瓷和n+1层惰性陶瓷;
3.根据权利要求2所述的方法,其特征在于:所述步骤二中,为正向极化陶瓷赋予正向极化材料坐标系;为反向极化陶瓷赋予反向极化材料坐标系;
4.根据权利要求3所述的方法,其特征在于:所述正向极化坐标系包括相互垂直的x/y/z轴;x/y轴在活性陶瓷层水平面内,z向垂直与活性陶瓷层水平面向上;
5.根据权利要求4所述的方法,其特征在于:所述步骤三中,为通电分支电极施加电势u,为接地分支电极施加电势0;
6.根据权利要求5所述的方法,其特征在于:所述理想气体的介电常数小于2;
7.根据权利要求6所述的方法,其特征在于:所述步骤四中,指尖应力计算过程如下:
8.一种叉指电极压电叠堆驱动器,其特征在于:所述驱动器通过权利要求1-7中任一项所述的方法设计得到。
技术总结
本发明涉及压电材料技术领域,特别是涉及一种用于叉指电极型压电叠堆驱动器的建模和指尖应力计算方法。包括以下步骤:步骤一:建立叉指电极压电叠堆驱动器几何模型;步骤二:为几何模型设置材料属性;步骤三:为几何模型设置边界条件;步骤四:对几何模型进行网格划分并进行指尖应力计算。
技术研发人员:姚佐聪,朱棣文,段锦帆,胡和平,高乐,张仕明,魏武雷,江期凰,黄剑,贺子豪
受保护的技术使用者:中国直升机设计研究所
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!