位姿调整系统、医疗器械及其控制方法、以及医疗系统与流程
本申请涉及工业设备或医疗设备领域,特别是涉及一种位姿调整系统、具有该位姿调整系统的医疗器械及其控制方法、以及医疗系统。
背景技术:
1、随着科技的发展,精细运动控制设备已应用于各行各业中。其中应用较为广泛的是在医疗领域,例如,各类微创手术机构的自动控制。微创手术由于无法目视体表下患者的具体身体结构,发展出了通过各类医学扫描设备引导的精确位置定位。由此,适用于此场景下的精细运动控制设备则有了长足发展。
技术实现思路
1、本申请公开了一种位姿调整系统以及具有该位姿调整系统的医疗装置。该位姿调整系统具有高稳定高自由度,能实现各类运动变化及精细控制。
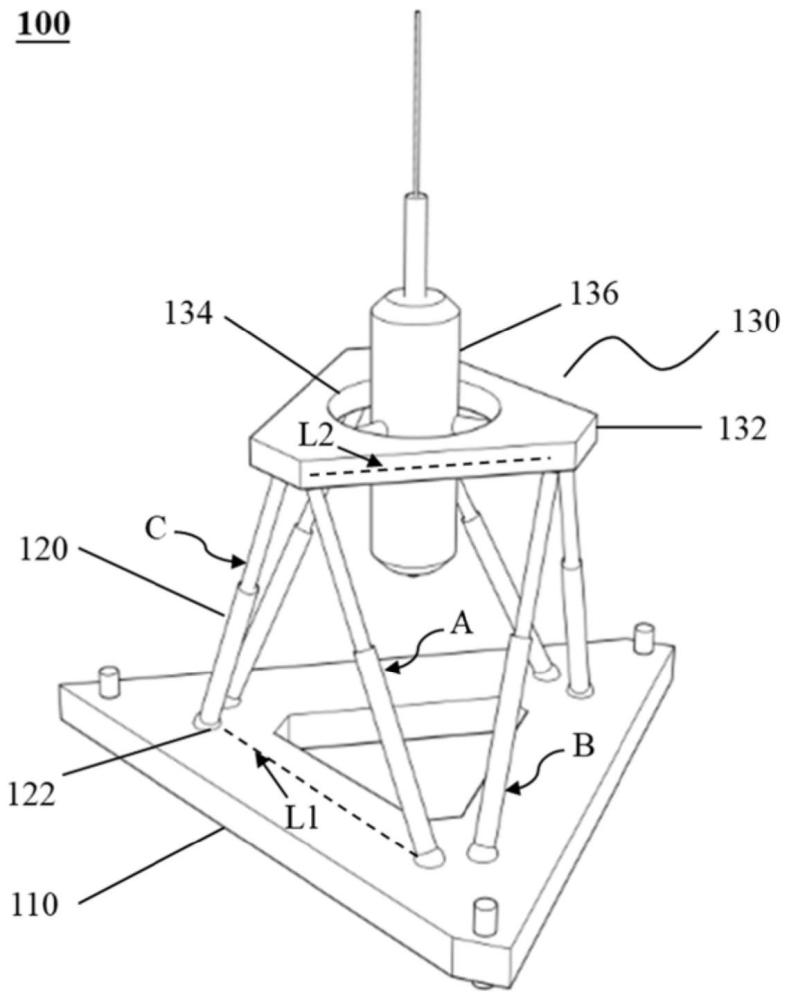
2、本申请一方面公开了一种位姿调整系统。所述位姿调整系统包括底座,多个可动连杆,可动平台以及电机。其中,每个可动连杆的两端分别通过可动部件与所述底座和所述可动平台固定连接;所述可动部件具有有限个自由度。所述电机用于驱动所述多个可动连杆运动,配合所述可动部件使所述可动平台具有多个自由度。
3、本申请另一方面公开一种医疗装置。所述医疗装置包括如上所述的位姿调整系统以及曲面支架。所述曲面支架包括由多个刚性网格线分隔的多个通孔区域,所述位姿调整系统安置于所述通孔区域之上。所述可动平台包括具备连接部的微创手术机构,所述连接部用于与所述可动部件进行固定连接;所述微创手术机构的运动范围包括所述通孔区域以及与所述通孔区域邻接的一个或以上其他通孔区域。
4、本申请另一方面公开一种医疗装置的控制方法。所述方法包括获取第一目标对象的第一待手术区域的第一医学扫描图像;基于所述第一医学扫描图像,确定所述第一待手术区域的第一目标位置,以及所述微创手术机构在安装于承载所述第一目标对象的治疗床上的曲面支架上的第二目标位置;基于所述第一目标位置和所述第二目标位置,确定所述微创手术机构的运动控制计划;至少基于所述运动控制计划,控制所述微创手术机构运动。
5、本申请另一方面提供一种医疗装置的控制系统。所述控制系统包括第一获取模块、第一确定模块、第一计划模块以及第一控制模块。所述第一获取模块用于获取第一目标对象的第一待手术区域的第一医学扫描图像。所述用于第一确定模块用于基于所述第一医学扫描图像,确定所述第一待手术区域的第一目标位置,以及所述微创手术机构在安装于承载所述第一目标对象的治疗床上的曲面支架上的第二目标位置。所述第一计划模块用于基于所述第一目标位置和所述第二目标位置,确定所述微创手术机构的运动控制计划。所述第一控制模块用于至少基于所述运动控制计划,控制所述微创手术机构运动。
6、本申请另一方面提供一种系统。所述系统包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的方法的步骤。
7、本申请另一方面提供一种计算机可读存储介质。所述存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上所述的方法的步骤。
8、本申请另一方面提供一种医疗系统。所述医疗系统包括如上所述的医疗装置以及处理器。处理器可执行机器可执行指令,并实现以下操作:获取第一目标对象的第一待手术区域的第一医学扫描图像;基于所述第一医学扫描图像,确定所述第一待手术区域的第一目标位置,以及所述微创手术机构在安装于承载所述第一目标对象的治疗床上的曲面支架上的第二目标位置;基于所述第一目标位置和所述第二目标位置,确定所述微创手术机构的运动控制计划;至少基于所述运动控制计划,控制所述微创手术机构运动。
9、本申请另一方面公开一种医疗装置。所述医疗装置包括所述医疗装置包括如上所述的位姿调整系统以及支撑架。所述位姿调整系统安装于所述支撑架之上,包括微创手术机构。所述支撑架在外力的作用下能够带动所述微创手术机构便利地进出医学扫描设备的扫描范围,所述微创手术机构藉由所述可动连杆和所述可动部件的运动实现位置调整。
10、本申请另一方面公开一种医疗装置的控制方法。所述方法包括获取第二目标对象的第二待手术区域的第二医学扫描图像;基于所述第二医学扫描图像,确定所述第二待手术区域的第三目标位置,并调整所述医疗装置至第四目标位置;控制所述微创手术机构从所述第四目标位置运动至所述第三目标位置。
11、本申请另一方面提供一种医疗装置的控制系统。所述控制系统包括第二获取模块、第二确定模块以及第二控制模块。所述第二获取模块用于获取第二目标对象的第二待手术区域的第二医学扫描图像。所述用于第二确定模块用于基于所述第二医学扫描图像,确定所述第二待手术区域的第三目标位置,并调整所述医疗装置至第四目标位置。所述第二控制模块用于控制所述微创手术机构从所述第四目标位置运动至所述第三目标位置。
12、本申请另一方面提供一种系统。所述系统包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的方法的步骤。
13、本申请另一方面提供一种计算机可读存储介质。所述存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上所述的方法的步骤。
14、本申请另一方面提供一种医疗系统。所述医疗系统包括如上所述的医疗装置以及处理器。处理器可执行机器可执行指令,并实现以下操作:获取第二目标对象的第二待手术区域的第二医学扫描图像;基于所述第二医学扫描图像,确定所述第二待手术区域的第三目标位置,并调整所述医疗装置至第四目标位置;控制所述微创手术机构从所述第四目标位置运动至所述第三目标位置。
技术特征:
1.一种位姿调整系统,其特征在于,包括:
2.根据权利要求1所述的位姿调整系统,其特征在于,所述可动平台包括顶面和设置于所述顶面上的安装部,所述安装部用于安装工件或器械;或所述可动平台包括具备连接部的工件或器械,所述连接部用于与所述可动部件进行固定连接;所述可动平台的中心点在所述底座所在平面上的投影能够超出所述底座的范围。
3.根据权利要求1或2所述的位姿调整系统,其特征在于,所述可动连杆的个数为6个,所述可动平台具有6个自由度。
4.医疗装置,其特征在于,所述医疗装置包括:
5.根据权利要求4所述的医疗装置,其特征在于,所述刚性网格线包括向所述通孔区域外凸的限位部,所述限位部用于承载所述底座以使所述位姿调整系统安置于所述曲面支架之上,所述电机设置于所述曲面支架之外;所述曲面支架可拆卸地安装于承载目标对象的治疗床上,并覆盖所述目标对象;所述位姿调整系统安置于所述通孔区域之上后,所述目标对象的待手术区域位于所述微创手术机构的运动范围内。
6.根据权利要求4或5所述的医疗装置,其特征在于,所述曲面支架和所述位姿调整装置由医学扫描可兼容材料制备。
7.一种如权利要求4-6任一项所述的医疗装置的控制方法,其特征在于,所述方法包括:
8.一种医疗系统,其特征在于,包括:
9.医疗装置,其特征在于,所述医疗装置包括:
10.根据权利要求9所述的医疗装置,其特征在于,所述电机设置于医学扫描设备的扫描范围之外;所述医学扫描设备至少包括x射线数字成像设备或超声波扫描仪。
11.根据权利要求9或10所述的医疗装置,其特征在于,所述支撑架和所述位姿调整装置由医学扫描可兼容材料制备。
12.一种如权利要求9-11任一项所述的医疗装置的控制方法,其特征在于,所述方法包括:
13.一种医疗系统,其特征在于,包括:
技术总结
本申请公开一种位姿调整系统。所述位姿调整系统包括底座,多个可动连杆,可动平台以及电机。其中,每个可动连杆的两端分别通过可动部件与所述底座和所述可动平台固定连接;所述可动部件具有有限个自由度。所述电机用于驱动所述多个可动连杆运动,配合所述可动部件使所述可动平台具有多个自由度。
技术研发人员:王小奇
受保护的技术使用者:合谦全科技(嘉兴)有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!