康复按摩机器人及康复装置的制作方法
本发明涉及医疗器械,具体地,涉及一种康复按摩机器人及康复装置。
背景技术:
1、据统计,我国每年发生脑中风人次达200万。发病率高达120人/10万人。现幸存中风病人700万,其中450万病人不同程度丧失劳动力和生活不能自理。致残率高达75%,尤其表现为手部的运动障碍。因此,发生脑中风后,手部的活动障碍也成为阻碍患者整体康复的重要因素。随着社会经济的飞速发展,人们对健康的需求也在不断地提高,康复服务的出现是适应社会时代的产物,是可以为广大患者带来福音的一种医疗服务形式。
2、传统的手臂康复训练主要由治疗师徒手或借助较为简单的器械一对一地对患者的手臂进行按摩,受治疗师的实践经验和技术水平的影响,康复训练效果无法得以保障。
技术实现思路
1、为解决传统的手臂康复训练方式无法保障康复训练效果的问题,本发明提供一种康复按摩机器人及康复装置。
2、为实现本发明目的提供的一种康复按摩机器人,包括:
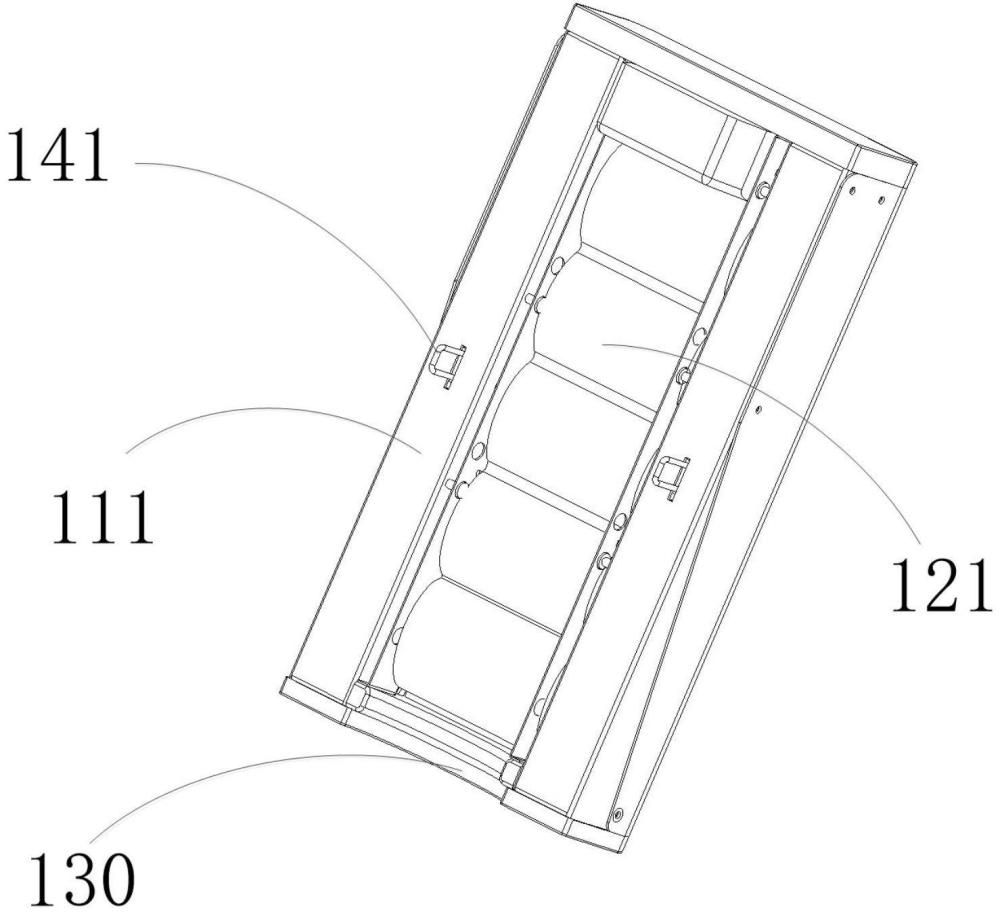
3、壳体,中部中空形成手臂容置腔;
4、第一按摩机构,设于手臂容置腔内,用于按摩手臂。
5、在其中一些具体实施例中,第一按摩机构为柔性按摩机构。
6、在其中一些具体实施例中,第一按摩机构包括:
7、上介质储存囊,为多个,均安装于手臂容置腔的上方,两两相互并列设置,能够发生预设程度的膨胀;
8、下介质储存囊,为多个,均安装于手臂容置腔的下方,两两相互并列设置,能够发生预设程度的膨胀。
9、在其中一些具体实施例中,第一按摩机构还包括:
10、加热部,安装于多个上介质储存囊的底面和/或多个下介质储存囊的顶面。
11、在其中一些具体实施例中,手臂容置腔内的相对两端分别安装有缓冲垫块或缓冲垫圈。
12、在其中一些具体实施例中,壳体包括下壳体和上壳体;
13、还包括:
14、锁止机构,设置于上壳体的底面和下壳体的顶面之间,用于连接上壳体的底面和下壳体的顶面或使上壳体的底面和下壳体的顶面断开连接。
15、在其中一些具体实施例中,还包括:
16、旋转开合机构,分别与上壳体、下壳体连接,能够使上壳体的底面与下壳体的顶面相贴合或相分离。
17、在其中一些具体实施例中,壳体的中部还形成有手掌容置腔;手掌容置腔与手臂容置腔相连通;
18、还包括:
19、第二按摩机构,设于手掌容置腔内,用于按摩手掌。
20、在其中一些具体实施例中,第二按摩机构包括:
21、上容置囊,安装于手掌容置腔的上方;
22、上直线驱动器,安装于上容置囊内;
23、上按摩杆,轴线与上直线驱动器的轴线相互垂直,中部与上直线驱动器的输出轴固定连接,由上直线驱动器驱使上按摩杆移动;
24、下容置囊,安装于手掌容置腔的下方;
25、下直线驱动器,安装于下容置囊内;
26、下按摩杆,轴线与下直线驱动器的轴线相互垂直,中部与下直线驱动器的输出轴固定连接,由下直线驱动器驱使下按摩杆移动。
27、基于同一构思的一种康复装置,包括上述任一些具体实施例提供的康复按摩机器人。
28、本发明的有益效果:本发明的康复按摩机器人通过设置壳体,壳体的中部中空形成用于容纳人体手臂的手臂容置腔。第一按摩机构设于手臂容置腔内,用于辅助或代替人工按摩手臂。相对于传统的手臂康复训练方式,大大改善了按摩效率,康复训练效果受治疗师的实践经验和技术水平的影响程度大大降低,使得康复训练效果得到了稳定的保障。同时,相对于人工按摩的方式,有利于降低治疗成本。
技术特征:
1.一种康复按摩机器人,其特征在于,包括:
2.根据权利要求1所述的康复按摩机器人,其特征在于,所述第一按摩机构为柔性按摩机构。
3.根据权利要求2所述的康复按摩机器人,其特征在于,所述第一按摩机构包括:
4.根据权利要求3所述的康复按摩机器人,其特征在于,所述第一按摩机构还包括:
5.根据权利要求1至4任一项所述的康复按摩机器人,其特征在于,所述手臂容置腔内的相对两端分别安装有缓冲垫块或缓冲垫圈。
6.根据权利要求1至4任一项所述的康复按摩机器人,其特征在于,所述壳体包括下壳体和上壳体;
7.根据权利要求6所述的康复按摩机器人,其特征在于,还包括:
8.根据权利要求1至4任一项所述的康复按摩机器人,其特征在于,所述壳体的中部还形成有手掌容置腔;所述手掌容置腔与所述手臂容置腔相连通;
9.根据权利要求8所述的康复按摩机器人,其特征在于,所述第二按摩机构包括:
10.一种康复装置,其特征在于,包括权利要求1至9任一项所述的康复按摩机器人。
技术总结
本发明涉及医疗器械技术领域,具体涉及一种康复按摩机器人及康复装置,其中,康复按摩机器人包括壳体和第一按摩机构;壳体的中部中空形成用于容纳人体手臂的手臂容置腔。第一按摩机构设于手臂容置腔内,用于辅助或代替人工按摩手臂。相对于传统的手臂康复训练方式,大大改善了按摩效率,康复训练效果受治疗师的实践经验和技术水平的影响程度大大降低,使得康复训练效果得到了稳定的保障。同时,相对于人工按摩的方式,有利于降低治疗成本。
技术研发人员:赵静静,赵鑫,鲍磊,张雅婷
受保护的技术使用者:北京软体机器人科技股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!