一种基于标识符自主识别的增强现实导航系统及导航方法
本发明属于增强现实、计算机视觉、刚体运动学,具体涉及一种基于标识符自主识别的增强现实导航系统及导航方法。
背景技术:
1、传统手术受制于医生视野,操作过程往往伴随大的创伤,存在精度差、效率低的弊端。手术导航系统为外科医生提供病灶部位的可视化及操作过程的实时引导,在减少手术创伤的同时,提升了手术的精度和效率,在外科领域得到了广泛应用。然而,常规的手术导航系统依赖于电脑屏幕,需要医生视线在病灶部位和显示屏之间频繁切换,存在手眼不协调的问题。增强现实(augmented reality,ar)技术的发展为上述问题提供了优势解决方案。ar导航系统并不依赖于计算机屏幕,而是把重建后ct影像作为虚拟物体叠加在真实手术场景中,医生可以通过ar设备“透视”皮下器官和组织,降低手术难度的同时提高了手术安全性。
2、虚实标定是实现虚拟影像和病患部位的精准融合的前提,其精度和效率同时也决定了ar系统的导航精度和引导效果。“黑箱方法”是当前虚实标定的主流思想,其不考虑ar设备的内部复杂变换,将虚实标定抽象成黑箱问题,通过同一位置下虚实模型的位姿作为输入和输出,进而建立虚实空间映射关系。基于上述思想的标定方法主要分为基于探针采集点位和基于虚实物体对齐两类。基于探针采集点位的方法使用带有红外标记球的探针采集虚拟空间点的现实数据,计算映射进而实现虚实空间标定,该方法的缺陷在于虚拟点的采集在手部抖动的影响下误差较大。基于虚实物体对齐的方法通过将带有明显特征的辅助物体对齐到对应的虚拟物体实现空间标定,该方法的缺点在于虚实物体的对齐严重依赖于观察者,主观因素导致的误差较大。
3、综上,现有方法均无法实现精准高效的虚实空间标定过程。因此,本发明提出一种自动式空间标定方法并搭建手术导航系统,为精准高效的手术操作奠定基础。
技术实现思路
1、本发明为解决现有技术存在的问题而提出,其目的是提供一种基于标识符自主识别的增强现实导航系统及导航方法。
2、本发明的技术方案是:一种基于标识符自主识别的增强现实导航系统,包括以下子模块:
3、导航仪通信模块,建立光学定位设备的数据传输通道;
4、配准与定位模块,进行点云配准,得到实际患骨在现实空间位置上的对应关系;
5、增强现实空间标定模块,建立起虚拟空间与现实空间的映射,完成增强现实手术导航的空间标定;
6、位姿信息交互模块,实现增强现实空间中各个位姿信息的交互和存储;
7、跟踪和可视化模块,实现增强现实手术引导的实时跟踪和可视化。
8、更进一步的,所述导航仪通信模块包括通讯模块,所述通讯模块将光学定位设备识别到的反光标志位姿信息传输到计算机。
9、更进一步的,所述导航仪通信模块包括存储模块,所述存储模块对不同局部坐标系的位姿信息进行分类储存,用于导航系统后续的跟踪引导。
10、更进一步的,所述配准与定位模块将病患部位局部坐标系下的点云和世界坐标系下的点云进行配准,得到二者点云的转换矩阵。
11、更进一步的,所述增强现实空间标定模块基于标识符自主识别的空间标定方法,对增强现实虚拟空间和现实空间进行标定。
12、更进一步的,所述位姿信息交互模块包括增强现实设备端部分和计算机端部分,增强现实设备端部分和计算机端部分双向网络通信。
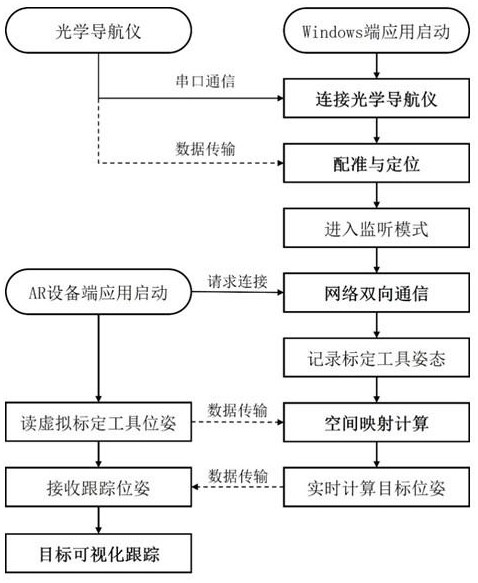
13、一种基于标识符自主识别的增强现实导航系统的导航方法,包括以下步骤:
14、a.导航模型准备;
15、b.进行图像配准与定位;
16、c.进行双端网络通信;
17、d.进行增强现实空间标定;
18、e.进行三维可视化跟踪。
19、更进一步的,步骤a导航模型准备,具体过程如下:
20、首先,进行导航模型的数据采集;
21、然后,建立导航仪与计算机的通信联系;
22、最后,进行增强现实设备端应用开发。
23、更进一步的,步骤b进行图像配准与定位,具体过程如下:
24、首先,在两个不同坐标系之间建立准确的空间变换关系;
25、然后,利用奇异值分解法计算两坐标系的变换关系;
26、最后,使一个坐标系与另一个坐标系在对应点处达到空间上的一致。
27、更进一步的,步骤d进行增强现实空间标定,具体过程如下:
28、依赖标识符识别的空间标定方法准确获取虚拟空间与现实空间的映射关系。
29、本发明的有益效果如下:
30、本发明借助携带标识符的辅助标定工具,识别标识符自动对齐虚拟影像能够在短时间内完成,消除了主观因素带来的误差,提升了增强现实空间标定的精度和效率。
31、本发明提出的一种增强现实手术导航系统,能将虚拟影像精准地增强融合于指定的病患部位,让医生清楚观察到手术结构,也为医生提供了符合人体工程学的更高精度的手术引导,同时还避免了手术过程病患部位大切口。
技术特征:
1.一种基于标识符自主识别的增强现实导航系统,其特征在于:包括以下子模块:
2.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统,其特征在于:所述导航仪通信模块包括通讯模块,所述通讯模块将光学定位设备识别到的反光标志位姿信息传输到计算机。
3.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统,其特征在于:所述导航仪通信模块包括存储模块,所述存储模块对不同局部坐标系的位姿信息进行分类储存,用于导航系统后续的跟踪引导。
4.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统,其特征在于:所述配准与定位模块将病患部位局部坐标系下的点云和世界坐标系下的点云进行配准,得到二者点云的转换矩阵。
5.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统,其特征在于:所述增强现实空间标定模块基于标识符自主识别的空间标定方法,对增强现实虚拟空间和现实空间进行标定。
6.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统,其特征在于:所述位姿信息交互模块包括增强现实设备端部分和计算机端部分,增强现实设备端部分和计算机端部分双向网络通信。
7.一种基于标识符自主识别的增强现实导航系统的导航方法,其特征在于:包括以下步骤:
8.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统的导航方法,其特征在于:步骤a导航模型准备,具体过程如下:
9.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统的导航方法,其特征在于:步骤b进行图像配准与定位,具体过程如下:
10.根据权利要求1所述的一种基于标识符自主识别的增强现实导航系统的导航方法,其特征在于:步骤d进行增强现实空间标定,具体过程如下:
技术总结
本发明公开了一种基于标识符自主识别的增强现实导航系统及导航方法,其导航系统包括以下子模块:导航仪通信模块,建立光学定位设备的数据传输通道;配准与定位模块,得到实际患骨在现实空间位置上的对应关系;增强现实空间标定模块,完成增强现实手术导航的空间标定;位姿信息交互模块,实现增强现实空间中各个位姿信息的交互和存储;跟踪和可视化模块,实现增强现实手术引导的实时跟踪和可视化;其导航方法,包括以下步骤:导航模型准备;进行图像配准与定位;进行双端网络通信;进行增强现实空间标定;进行三维可视化跟踪。本发明提升了增强现实空间标定的精度和效率,避免了手术过程病患部位大切口。
技术研发人员:王贺林,刘传耙,孙涛
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!