一种仿生机器人的制作方法
本发明涉及医用仿生设备,具体涉及一种仿生机器人。
背景技术:
1、现在世界上通用的肠道检查取样都是需要麻醉,风险大副作用也大。造成人们怕麻烦,担心副作用而放弃检查,等到症状明显的时候再去检查往往都是晚期。胃镜检查取样中现有的胃镜也是相对比较硬,检查时病人咽喉不适感强烈,主要表现为干呕,流泪。结石病人的传统治疗是药物排石,超声波碎石,手术。药物排石有不确定性和副作用,超声波和手术有创伤和康复期也长,对病人不利。传统的意外妊娠处理,也是药物和手术刮宫,也是副作用和创伤,甚至会导致妇科病或不孕不育。
2、综合以上,针对这些传统检查或取样的不足,我们研制了一种用于咽喉和肠胃检查取样的仿生机器人,也适用于肾结石,膀胱和尿道结石的取出,终止意外怀孕,胚胎的精准取出。
技术实现思路
1、解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了一种仿生机器人,本发明旨在提供一种可以给患者带来极大的治疗方便,可以在无创伤,无痛感,无副作用的情况之下完成疾病的治疗或健康检查的产品。
3、技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
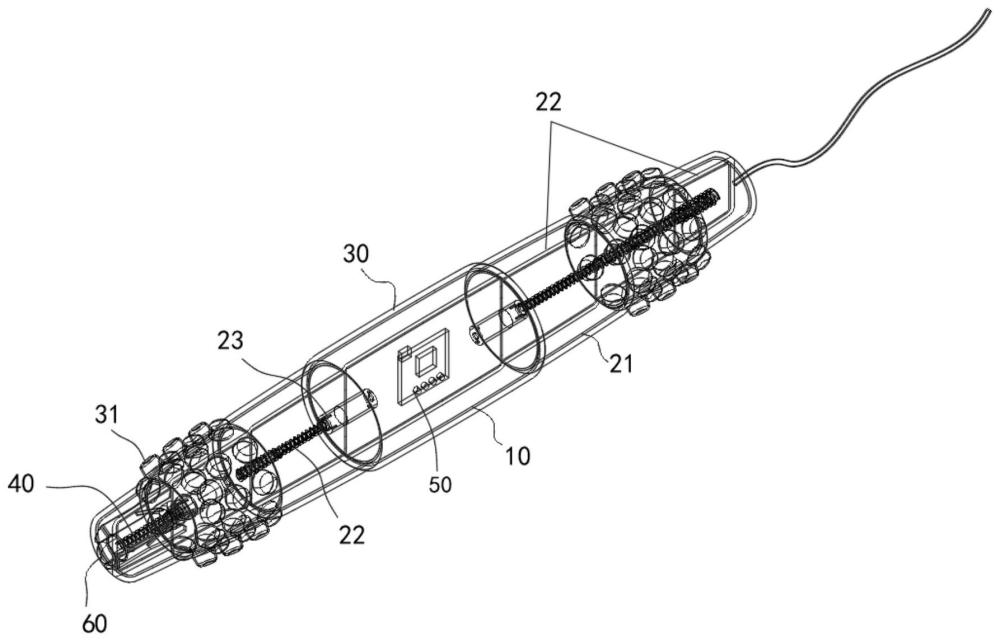
5、本发明提供一种仿生机器人,包括支承体;
6、以及可自动伸缩骨架,共线设置在所述支承体的两端,所述可伸缩骨架主要由多个相互嵌套的管体组成,多个所述管体间可实现自动张开或收缩。
7、还包括柔韧材质的硅胶套体,其整体套设在所述支承体及可伸缩骨架的外侧,所述硅胶套体的外表面上靠近端部处设置有多个呈环状分布的吸盘,在所述仿生机器人移动过程中,所述吸盘可间歇式地吸附固定在病人的器官通道的内壁上;其中,一侧的所述可伸缩骨架的端部设置有可开合的夹持咀,且所述夹持咀的中心处设置有摄像头。
8、进一步地,所述支承体为内部空心的柱体结构,所述可伸缩骨架沿所述支承体的轴线设置。
9、进一步地,所述可伸缩骨架相邻的所述管体之间嵌套设置,可沿其轴线方向平移,所述管体之间通过螺旋副结构进行位移调节。
10、进一步地,所述管体呈空心的锥台结构,所述管体的内径自所述支承体向外侧逐渐减小。
11、进一步地,所述螺旋副结构包括多个相互螺旋配合螺管体,所述螺管体内部为螺旋腔,外部为螺旋凸起,其中,位于内侧的所述管体上的螺管体与外侧管体上的螺管体螺旋配合实现相邻管体间的距离调节。
12、进一步地,置于最内侧所述管体内的所述螺管体的端部连接有第一微型电机,其他所述管体内的螺管体沿其轴线固定设置。
13、进一步地,所述夹持咀包括夹爪、弹性支撑臂和直动机构,所述夹爪呈圆周均匀设置分布,所述夹爪的一端可伸出所述管体,另一端固定连接有所述弹性支撑臂,所述弹性支撑臂与所述直动机构的移动副铰接在一起,其中,最外侧的所述管体上开设有供所述夹爪伸出的槽口。
14、进一步地,所述直动机构置于最外侧的所述管体,所述直动机构还包括螺杆和第二微型电机,所述移动副螺旋连接在所述螺杆上,所述螺杆转动连接在所述管体内,且端部与所述第二微型电机联动。
15、进一步地,所述摄像头用于采集实时图像,并通过5g无线技术将采集的图像信息传输到外部图像监视器。
16、进一步地,所述硅胶套体在相悖于设置有摄像头的一侧上连接有微型保险绳。
17、有益效果
18、本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
19、本产品的仿生机器人结合蚯蚓的外形和运动原理,外侧采用一体的硅胶套体,内置自动的可伸缩骨架,并通过硅胶套体外侧呈环状分布的吸盘结构,使得仿生机器人可轻松实现在病人器官通道内的移动和转弯,在利用端部功能区的摄像头和夹持咀实现检查、治疗或病灶取样等工作,使用本产品机器人可以给患者带来极大的治疗方便,可以在无创伤,无痛感,无副作用的情况之下完成疾病的治疗或健康检查,使用此发明可让患者减少身体伤害,减少治疗时的痛苦和恐惧,无任何副作用和创伤有利于人们可以及时体检,做到早发现早治疗,确保人民的身体健康。
技术特征:
1.一种仿生机器人,其特征在于,包括:
2.根据权利要求1所述的一种仿生机器人,其特征在于,所述支承体为内部空心的柱体结构,所述可伸缩骨架沿所述支承体的轴线设置。
3.根据权利要求2所述的一种仿生机器人,其特征在于,所述可伸缩骨架相邻的所述管体之间嵌套设置,可沿其轴线方向平移,所述管体之间通过螺旋副结构进行位移调节。
4.根据权利要求3所述的一种仿生机器人,其特征在于,所述管体呈空心的锥台结构,所述管体的内径自所述支承体向外侧逐渐减小。
5.根据权利要求3所述的一种仿生机器人,其特征在于,所述螺旋副结构包括多个相互螺旋配合螺管体,所述螺管体内部为螺旋腔,外部为螺旋凸起,其中,位于内侧的所述管体上的螺管体与外侧管体上的螺管体螺旋配合实现相邻管体间的距离调节。
6.根据权利要求5所述的一种仿生机器人,其特征在于,置于最内侧所述管体内的所述螺管体的端部连接有第一微型电机,其他所述管体内的螺管体沿其轴线固定设置。
7.根据权利要求1所述的一种仿生机器人,其特征在于,所述夹持咀包括夹爪、弹性支撑臂和直动机构,所述夹爪呈圆周均匀设置分布,所述夹爪的一端可伸出所述管体,另一端固定连接有所述弹性支撑臂,所述弹性支撑臂与所述直动机构的移动副铰接在一起,其中,最外侧的所述管体上开设有供所述夹爪伸出的槽口。
8.根据权利要求7所述的一种仿生机器人,其特征在于,所述直动机构置于最外侧的所述管体,所述直动机构还包括螺杆和第二微型电机,所述移动副螺旋连接在所述螺杆上,所述螺杆转动连接在所述管体内,且端部与所述第二微型电机联动。
9.根据权利要求1所述的一种仿生机器人,其特征在于,所述摄像头用于采集实时图像,并通过5g无线技术将采集的图像信息传输到外部图像监视器。
10.根据权利要求1所述的一种仿生机器人,其特征在于,所述硅胶套体在相悖于设置有摄像头的一侧上连接有微型保险绳。
技术总结
本发明涉及医用仿生设备技术领域,具体涉及一种仿生机器人,包括支承体;以及可自动伸缩骨架,共线设置在所述支承体的两端,所述可伸缩骨架主要由多个相互嵌套的管体组成,多个所述管体间可实现自动张开或收缩。还包括柔韧材质的硅胶套体,其整体套设在所述支承体及可伸缩骨架的外侧,所述硅胶套体的外表面上靠近端部处设置有多个呈环状分布的吸盘,所述吸盘用于吸附固定在病人的器官通道的内壁上;其中,一侧的所述可伸缩骨架的端部设置有可开合的夹持咀,且所述夹持咀的中心处设置有摄像头;本发明旨在提供一种可以给患者带来极大的治疗方便,可以在无创伤,无痛感,无副作用的情况之下完成疾病的治疗或健康检查的产品。
技术研发人员:王文高,辜得盛,扶瑶,杨斯宁
受保护的技术使用者:广东高信智能科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!