一种基于多工况、多模块的志愿者姿态采集方法及实验平台
本发明专利涉及志愿者姿态采集实验,特别涉及一种多工况、多模块的志愿者姿态参数采集的方法及实验平台。
背景技术:
1、随着全球社会经济的不断发展,汽车工业规模的逐步扩大,带来了交通拥挤、道路交通事故频发等问题,进而导致两轮车、平衡车、踏板车等短途出行的环境友好型替代品,在很短时间内就得到了普及。全球关于两轮车、平衡车、踏板车的事故频发且基数大,其道路安全形势较为严峻。
2、目前,为降低相关事故的发生,我国多地出台了相关政策限制这些车辆在公共道路上行驶,但是在封闭道路、交通路口等地点,仍然可能与机动车辆发碰撞事故。同为道路弱势使用群体,两轮车、平衡车、踏板车骑行者在紧急状况下的姿态,与行人有明显的区别。本发明利用实验平台模拟真实道路场景,测量两轮车、平衡车、踏板车骑行者姿态参数,为总结出骑行者的典型姿态提供的数据支持,然后为探究不同姿态下骑行者的损伤区别奠定数据基础,为推进运动防护装备的佩戴要求提供数据支持。本发明是在室内实验室内完成,在保证志愿者安全问题的前提下,通过在人体多个位置安装位置传感器,从而获得连续的空间点轨迹,进而获得连续的人体姿态参数。此装置结合vr设备还原真实道路场景,具有可行性,便于学生在校可以实现两轮车、平衡车、踏板车骑行者的姿态参数测量。
技术实现思路
1、为了达到上述目的,本发明设计一种测量多工况、多模块的志愿者姿态采集方法及实验平台,用于解决还原真实场景的两轮车、平衡车、踏板车骑行者姿态参数采集技术问题。
2、为实现上述目的及其他相关目的,本发明提供一种测量志愿者姿态参数的方法,包括以下装置:
3、模拟实验台、可更换的信号采集模块(包括模拟平衡车模块、模拟两轮车模块、模拟踏板车模块)、vr设备、位置传感器、摄像头、数据处理中心。
4、为了方便描述,本发明基于平衡车模块来进行描述。
5、该方法测量平衡车骑行者的姿态参数的步骤如下:
6、s1:实验前准备:测量志愿者的身高、腿长、手长、肩宽的具体参数,并将它们输入到数据中心;将位置传感器按照对应的顺序安装在志愿者的身上;模拟实验台四个方位摄像头进行伸缩、旋转直到位于合适的位置;
7、s2:vr设备提前录制好真实的道路场景,建立真实汽车模型,并与数据中心连接;志愿者通过进行真实平衡车操作,可以通过脚下的模拟踏板和摇杆将信号输入数据中心,进而控制vr设备中的场景变化;
8、s3:平衡车模拟实验台的模拟踏板下面有四个压力传感器,摇杆两侧有两个压力传感器,可以输出压力信号,输出的压力传感器信号越强,对应vr设备中的场景变换就越快;模拟实验台四周设有鼓风模块,可以模拟不同风速的工况;设置不同的路面情况、路面粗糙度,在相同的压力信号之下,虚拟场景变换速度不同;模拟平衡车可以调节为不同的角度以模拟不同的坡道;
9、s4:开展实验:志愿者穿戴相应的传感器以及vr设备,做好实验准备。实验人员通过鼓风模块、设置路面情况以及调整模拟平衡车的角度做好场景设置,开始采集实验。志愿者按照自己意愿利用模拟踏板和摇杆在虚拟场景里进行行驶,以完成匀速行进、变速行进以及其他可能出现的驾驶行为。在此基础上,利用虚拟场景中预设的汽车模型,没有规律地以不同速度出现在虚拟场景中;
10、s5:数据读取:采取的数据分为视屏数据和位置传感器的位置数据,两者都是连续的。视屏数据是直观的,用于对比并验证获得的姿态参数;位置数据,是基于身上穿戴的位置传感器获取的;传感器定义了身体的各个关节,数据中心可以采集并保存各个传感器连续的位置曲线,进而获得连续的姿态参数;
11、优选地,测量志愿者身高、腿长、手长、肩宽的具体参数,是便于数据处理中心集成关节点空间连续坐标时,进行修正,使得获得的姿态参数数据更加贴近志愿者形态特征。
12、优选地,利用位置传感器来测量各工况下平衡车骑行者的姿态参数,是便于模拟真实场景,获取更加接近真实的姿态参数数据。
13、优选地,实验台四个方位摄像头进行伸缩、旋转是为了针对不同体型的志愿者,找到一个合适拍摄位置,能够完整地拍摄志愿者的全部动作。
14、优选地,志愿者在穿戴设备之前,要穿好与模拟实验台配套的特质服装,该服装利用钢丝与实验台的顶部连接,在确保灵活度的同时,也可以避免志愿者在进行实验时摔倒。
15、优选地,模拟实验台的顶部应该装有强光灯,是为了在任意时刻都能清楚地拍摄志愿者的动作姿态,确保拍摄的姿态特征明显。
16、优选地,输出的压力传感器信号越强,对应vr设备中的场景变换就越快,表示在虚拟场景里行进的速度越快,设置不同工况、路面情况、坡度,将会导致同一压力传感器信号,对应的虚拟场景行进速度不同;
17、优选地,志愿者按照自己意愿在虚拟场景完成匀速行进、变速行进以及其他可能出现的驾驶行为,是为了采集迅速姿态、变速姿态以及其他驾驶姿态;
18、优选地,利用虚拟场景中预设的汽车模型,没有规律地以不同速度出现在虚拟场景的侧面,是为了模拟真实道路场景,并采集在紧急情况下的姿态以及其他驾驶姿态;
19、优选地,传感器定义的身体各个关节,是在空间里的点;
20、优选地,获取的位置数据,是关于空间点集的实时位置曲线,将每一个时刻的空间点集按照对应的顺序连接起来,就可以获得某一时刻人体的姿态,进而获得实时的姿态参数数据;
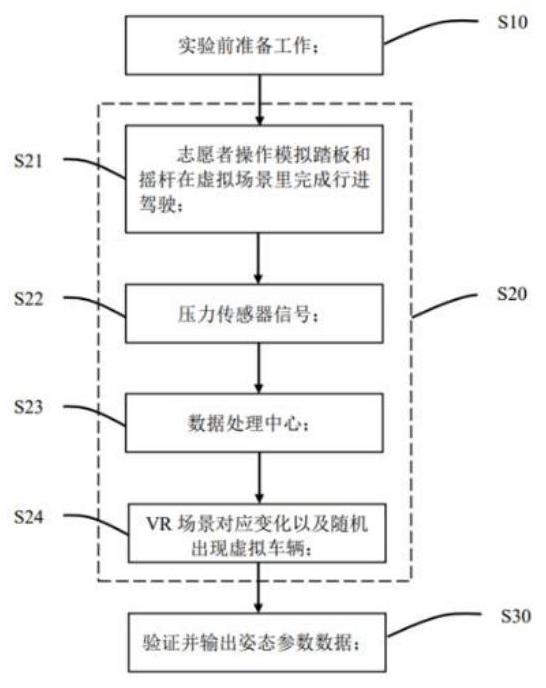
21、优选地,本发明提供一种基于多工况、多模块的志愿者姿态采集方法及实验平台,基于模拟平衡车模块,该方法包括以下步骤:
22、通过鼓风模块、设置路面情况以及调整模拟平衡车的角度做好场景设置,并将摄像头调整好,志愿者穿戴位置传感器和虚拟设备站到模拟踏板位置;
23、志愿者按照自己的意愿,在虚拟场景里面自由行驶,虚拟场景里随机出现虚拟车辆,摄像机和位置传感器记录下对应数据;
24、将数据导入数据处理中心,经过对比验证与处理获取姿态参数。
25、如上所述,本发明提供一种基于多工况、多模块的志愿者姿态采集方法及实验平台,具有以下有益效果:本发明利用实验平台模拟真实道路场景,具有可行性,便于学生在校可以实现平衡车骑行者的姿态参数测量,为总结出骑行者的典型姿态提供的数据支持,然后为探究不同姿态下骑行者的损伤区别奠定数据基础,为推进运动防护装备的佩戴要求提供数据支持。
技术特征:
1.一种基于多工况、多模块的志愿者姿态采集方法及实验平台,其特征在于,包括以下装置:
2.根据权利要求1所述的一种基于多工况、多模块的志愿者姿态采集方法及实验平台,其特征在于,利用vr设备还原真实场景获取更加贴近真实事故的骑行者姿态参数。
3.根据权利要求1所述的一种基于多工况、多模块的志愿者姿态采集方法及实验平台,其特征在于,以传感器信号为输入,数据处理中心输出对应指令,使得虚拟场景发生对应变化。
4.根据权利要求1所述的一种基于多工况、多模块的志愿者姿态采集方法及实验平台,其特征在于,平衡车模块可更换为两轮车模块和踏板车模块。
5.根据权利要求1所述的一种基于多工况、多模块的志愿者姿态采集方法及实验平台,其特征在于,输出的姿态参数数据利用志愿者真实体征参数进行修正并利用录像数据进行对比验证。
6.根据权利要求3所述的一种基于多工况、多模块的志愿者姿态采集方法及实验平台,其特征在于,平衡车模块输出的传感信号为压力传感信号,两轮车模块模拟自行车时输出的传感信号为车把角位移信号、刹车传感信号和踏板传感信号,两轮车模块模拟电动车时输出的传感信号为车把角位移信号、刹车传感信号和加速器信号,踏板车模块输出的传感信号为车把角位移信号、刹车传感信号和履带传感信号。
技术总结
本发明是一种基于多工况、多模块的志愿者姿态采集方法及实验平台,此装置结合VR设备还原真实道路场景,具有可行性,便于学生在校可以实现两轮车、平衡车、踏板车骑行者的姿态参数测量。具体基于平衡车模块提供一种测量平衡车骑行者的姿态参数方法,该方法包括:实验人员做好场景设置并调整摄像头,志愿者穿戴相应设备与传感器做好实验准备;志愿者按照自己的意愿操纵平衡车模块在虚拟场景中行驶;将录像和传感器数据输入至数据处理中心,通过连接每个时刻的关节点,并对照同一时刻的录像,获取平衡车驾驶员的姿态参数。基于本申请提供的技术方案,可以测量不同工况、不同模块下志愿者的姿态参数数据。
技术研发人员:王丹琦,卢逸康,胡林,王方,伍文广,武和全
受保护的技术使用者:长沙理工大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!