针对手术机器人的地图构建方法、装置和设备与流程
本申请涉及slam,尤其是涉及一种针对手术机器人的地图构建方法、装置和设备。
背景技术:
1、传统同步定位与建图(simultaneous localization and mapping,简称slam)在进行地图构建时,地图通常为固定不变的。例如,区别于传统slam场景,在植发slam场景下随着植发对象的生理运动(例如呼吸)地图可能发生一定的改变,因此传统slam的方式并不适用于手术机器人slam场景。并且,手术机器人的运行精度通常比传统slam场景下的精度高的多,目前的传统slam无法达到手术机器人所需的精度。
技术实现思路
1、本申请的目的在于提供一种针对手术机器人的地图构建方法、装置和设备,以缓解了传统slam精度低于手术机器人所需精度的技术问题。
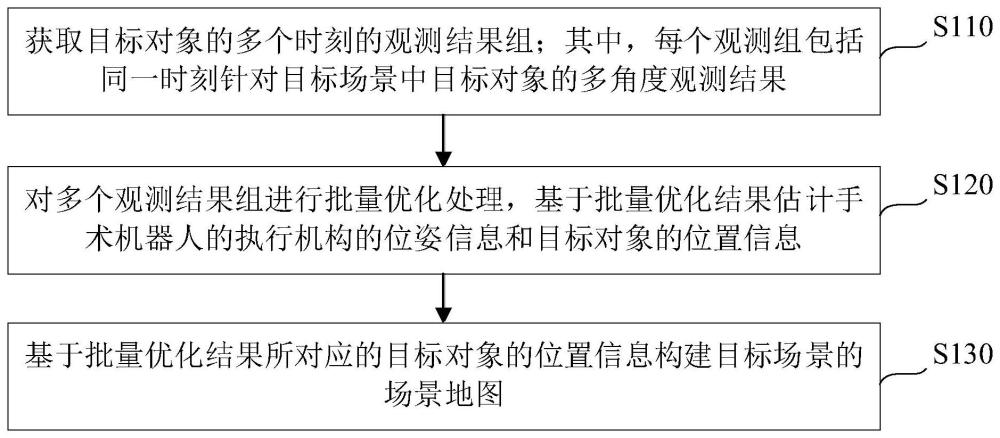
2、第一方面,本发明提供一种针对手术机器人的地图构建方法,方法包括:获取目标对象的多个时刻的观测结果组;其中,每个观测组包括同一时刻针对目标场景中目标对象的多角度观测结果;对多个观测结果组进行批量优化处理,基于批量优化结果估计手术机器人的执行机构的位姿信息和目标对象的位置信息;基于批量优化结果所对应的目标对象的位置信息构建目标场景的场景地图。
3、在可选的实施方式中,观测结果组为目标场景中连续多个目标对象的多角度观测结果;
4、对多个观测结果组进行批量优化处理,基于批量优化结果估计手术机器人的执行机构的位姿信息,包括:获取手术机器人的执行机构的运动方程,以及观测结果组对应的观测方程;基于运动方程确定执行机构的第一运动误差,基于观测方程确定第一观测误差;根据最优化代价函数、第一运动误差和第一观测误差进行批量优化处理,并对批量优化结果进行最优化求解,估计手术机器人的执行机构的位姿信息。
5、在可选的实施方式中,观测结果组为目标场景中时空邻近的一个或多个目标对象的多角度观测结果;
6、对多个观测结果组进行批量优化处理,基于批量优化结果估计手术机器人的执行机构的位姿信息,包括:确定下一目标对象的时空邻域内的观测结果组,以及执行机构的当前位姿;获取执行机构的运动方程和目标对象的位置信息;基于运动方程确定执行机构的第二运动误差,基于下一目标对象的时空邻域内的观测结果组确定第二观测误差;根据最优化代价函数、第二运动误差和第二观测误差按照时空邻近顺序进行时空滑窗处理,对时空滑窗处理结果进行最优化求解,并根据预先建立的计划方程计算手术机器人的执行机构移动至下一目标对象所对应的目标位姿和执行指令;其中,计划方程通过执行机构的绝对位姿、由于目标对象的运动产生的执行机构的误差偏差、执行机构的移动偏差和修正参数进行表征。
7、在可选的实施方式中,计划方程为:
8、
9、其中,uk+1为执行机构移动至下一目标对象所对应的目标位姿,uk+1+δ(uk+1)为执行机构移动至下一目标对象所对应的执行指令,为执行机构的绝对位姿,为由于目标对象的运动产生的执行机构的误差偏差,δ(uk+1)为执行机构的移动偏差,ηk+1为修正参数。
10、在可选的实施方式中,观测方程为手术机器人视觉传感器所对应的观测方程;其中,视觉传感器包括双目相机或多目相机,相应的,观测方程包括双目相机对应的观测方程对或多目相机对应的观测方程集。
11、在可选的实施方式中,运动方程为通过李代数进行表征的形式:
12、xk=f(xk-1,uk)+ωk
13、其中,xk为观测第k个目标对象时所对应的执行机构的实际位姿;xk-1为观测第k-1个目标对象时所对应的执行机构的实际位姿,uk为每次观测时执行机构的控制信息;ωk为执行机构在实际位置时的运动误差;f为运动方程。
14、在可选的实施方式中,手术机器人包括植发机器人。
15、第二方面,本发明提供一种针对手术机器人的地图构建装置,装置包括:观测结果获取模块,用于获取目标对象的多个时刻的观测结果组;其中,每个观测组包括同一时刻针对目标场景中目标对象的多角度观测结果;批量处理模块,用于对多个观测结果组进行批量优化处理,基于批量优化结果估计手术机器人的执行机构的位姿信息和目标对象的位置信息;地图构建模块,用于基于批量优化结果所对应的目标对象的位置信息构建目标场景的场景地图。
16、第三方面,本发明提供一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现前述实施方式任一项的针对手术机器人的地图构建方法。
17、第四方面,本发明提供一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现前述实施方式任一项的针对手术机器人的地图构建方法。
18、本申请提供的针对手术机器人的地图构建方法、装置和设备,由于多个时刻的观测结果组包含有不同时刻针对目标场景的多角度观测结果,通过对该多个时刻的观测结果组进行批量优化处理,在对执行机构的实际位姿和目标对象的位置信息进行估计时,可以减少因为视差因素所导致的建模错误甚至医疗事故,同时可减少单次观测时的误差所带来的影响,提升了手术机器人的地图构建精度。
技术特征:
1.一种针对手术机器人的地图构建方法,其特征在于,所述方法包括:
2.根据权利要求1所述的针对手术机器人的地图构建方法,其特征在于,所述观测结果组为目标场景中连续多个目标对象的多角度观测结果;
3.根据权利要求2所述的针对手术机器人的地图构建方法,其特征在于,所述观测结果组为目标场景中时空邻近的一个或多个目标对象的多角度观测结果;
4.根据权利要求3所述的针对手术机器人的地图构建方法,其特征在于,所述计划方程为:
5.根据权利要求3所述的针对手术机器人的地图构建方法,其特征在于,所述观测方程为手术机器人视觉传感器所对应的观测方程;其中,所述视觉传感器包括双目相机或多目相机,相应的,所述观测方程包括双目相机对应的观测方程对或多目相机对应的观测方程集。
6.根据权利要求3所述的针对手术机器人的地图构建方法,其特征在于,所述运动方程为通过李代数进行表征的形式:
7.根据权利要求1至6任一项所述的针对手术机器人的地图构建方法,其特征在于,所述手术机器人包括植发机器人。
8.一种针对手术机器人的地图构建装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至7任一项所述的针对手术机器人的地图构建方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现权利要求1至7任一项所述的针对手术机器人的地图构建方法。
技术总结
本申请提供了一种针对手术机器人的地图构建方法、装置和设备,涉及SLAM技术领域,该方法包括:获取目标对象的多个时刻的观测结果组;其中,每个观测组包括同一时刻针对目标场景中目标对象的多角度观测结果;对多个观测结果组进行批量优化处理,基于批量优化结果估计手术机器人的执行机构的位姿信息和目标对象的位置信息;基于批量优化结果所对应的目标对象的位置信息构建目标场景的场景地图。本申请缓解了传统SLAM精度低于手术机器人所需精度的技术问题,提升了手术机器人的地图构建精度。
技术研发人员:郭铭浩,陈鸿翔
受保护的技术使用者:术之道医疗科技(苏州)有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!