一种穿戴式假肢手套控制方法及系统
本发明涉及穿戴式假肢,尤其涉及一种穿戴式假肢手套控制方法及系统。
背景技术:
1、近年来,每年由于外伤导致手指缺失的残疾患者变得越来越多,而医院采用脚趾移植或者手指再造等手术的修补方式对容易患者造成二次伤害,且患者在术后所承受的痛苦较大,移植后的脚趾功能性差。因此,当前这类患者通常采用穿戴式假肢设备来弥补缺失手指的功能。
2、当前,部分整手截肢患者通过佩戴全手假肢,以利用手臂肌电信号或脑电信号实现对假肢的动作控制,但由于肌电与脑电信号特征提取与分析较为复杂,这种控制方式很难使假肢按照患者意图运动。
3、此外,部分手指截肢患者通常佩戴被动式假肢,即手腕的弯曲带动拉线驱动手指弯曲,然而这种被动式假肢无法精准控制每个关节运动,其功能性较差。
4、而在现有技术中,极少患者采用并佩戴主动式部分假肢来弥补缺失手指功能,其主要原因是:在设计主动式部分假肢时,患者的实时控制信号(肌电或脑电信号)难识别,常采用预编程的方式控制假肢运动,其人机交互性差,无法实现人机共融,且传感难集成,控制精度低,成本高。
技术实现思路
1、本发明所要解决的技术问题是:提供一种穿戴式假肢手套控制方法及系统,以解决现有的主动式部分假肢采用预编程方式进行人机交互所存在的人机交互性差、实时控制信号难提取、使用效果不佳的问题。
2、为了解决上述技术问题,本发明的技术方案为:一种穿戴式假肢手套控制方法,其包括步骤:
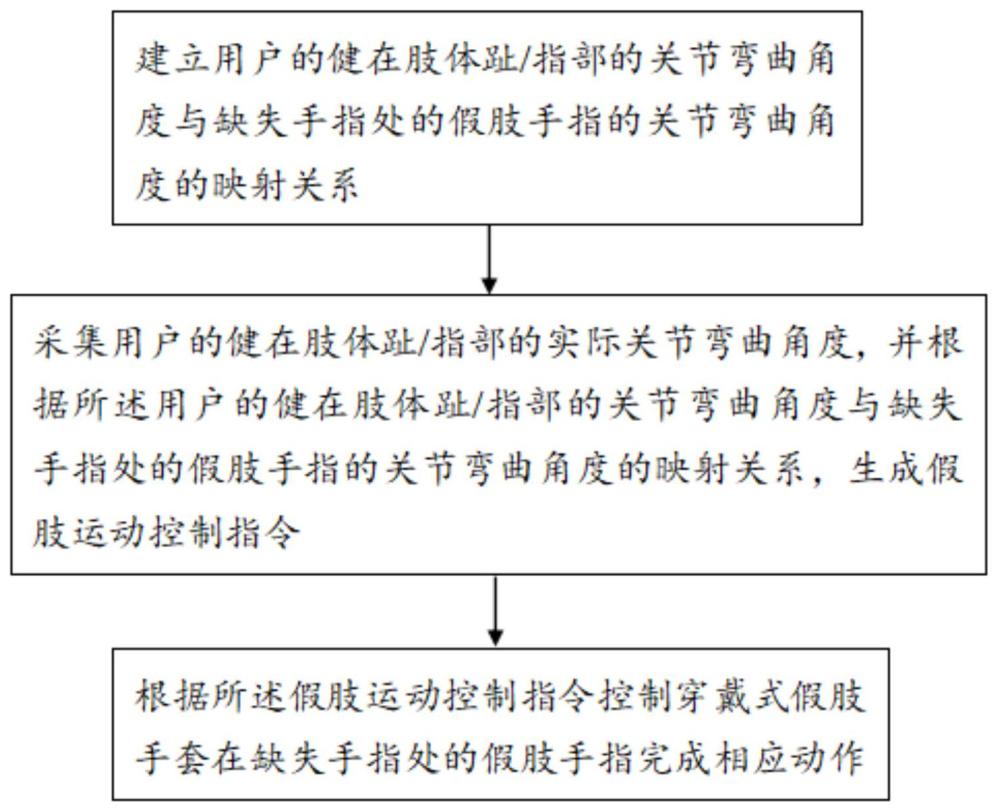
3、s1:建立用户的健在肢体趾/指部的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系;
4、s2:采集用户的健在肢体趾/指部的实际关节弯曲角度,并根据所述用户的健在肢体趾/指部的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系,生成假肢运动控制指令;
5、s3:根据所述假肢运动控制指令控制穿戴式假肢手套在缺失手指处的假肢手指完成相应动作。
6、进一步的,在本发明所述的穿戴式假肢手套控制方法中,在步骤s1中,具体包括以下步骤:
7、令用户的健侧手完成预设动作手势,并采集用户的健侧手在完成预设动作手势时的各个关节弯曲角度数据,并存储至数据库;
8、根据所述数据库,建立用户的患侧手的健在手指的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系。
9、进一步的,在本发明所述的穿戴式假肢手套控制方法中,在步骤s2中,具体包括以下步骤:
10、采集用户的患侧手的每个健在手指的实际关节弯曲角度,以根据所述用户的患侧手的健在手指的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系,生成假肢运动控制指令。
11、进一步的,在本发明所述的穿戴式假肢手套控制方法中,在步骤s1中,所述预设动作手势包括用户的常用动作手势。
12、进一步的,在本发明所述的穿戴式假肢手套控制方法中,在步骤s1中,所述建立用户的患侧手的健在手指的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系,具体为:
13、利用深度学习算法对手势进行动作分类并建立用户的患侧手的健在手指的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系。
14、进一步的,在本发明所述的穿戴式假肢手套控制方法中,所述深度学习算法为rnn算法。
15、进一步的,在本发明所述的穿戴式假肢手套控制方法中,在步骤s1中,具体包括以下步骤:
16、建立用户的健在脚趾的脚趾弯曲角度与缺失手指处的假肢手指的末端指节的关节弯曲角度的映射关系;
17、采集用户的健在脚趾的实际脚趾弯曲角度,以根据所述用户的健在脚趾的关节弯曲角度与缺失手指处的假肢手指的末端指节的关节弯曲角度的映射关系,生成假肢运动控制指令。
18、进一步的,在本发明所述的穿戴式假肢手套控制方法中,所述建立用户的健在脚趾的脚趾弯曲角度与缺失手指处的假肢手指的末端指节的关节弯曲角度的映射关系,具体为:
19、根据归一化算法,建立用户的健在脚趾的脚趾弯曲角度与缺失手指处的假肢手指的末端指节的关节弯曲角度的映射关系。
20、相应地,本发明的另一目的在于公开了一种穿戴式假肢手套控制系统,该穿戴式假肢手套控制系统用于实施本发明上述的穿戴式假肢手套控制方法,其包括:数据采集手套、假肢手套、弯曲度传感器、拉线、驱动器以及控制器;
21、所述假肢手套包括设置于用户缺失手指处的假肢手指,且所述数据采集手套和所述假肢手套均包括用于采集手指的末端指节弯曲角度的第一角度传感器以及用于采集手指的其它指节弯曲角度的第二角度传感器;其中,所述控制器与所述第一角度传感器、第二角度传感器、弯曲度传感器和驱动器分别连接,所述弯曲度传感器用于采集脚趾的脚趾弯曲角度,所述拉线的一端与假肢手指连接,且所述拉线的另一端与所述驱动器连接。
22、进一步的,在本发明所述的穿戴式假肢手套控制系统中,所述假肢手指包括彼此连接的第一指骨和第二指骨,所述第一指骨和第二指骨之间的关节处集成有径向充磁的磁环与磁编码器,所述磁环随第一指骨同步转动,所述磁编码器随第二指骨同步转动,且所述磁环与所述磁编码器同心转动。
23、本发明的有益效果在于:为解决现有主动式部分假肢采用预编程方式进行人机交互,实时控制信号提取难的问题,发明人优化设计了一种穿戴式假肢手套控制方法,其通过采集患者健在肢体趾/指部的关节弯曲角度,以构建用户的健在肢体趾/指部的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系,从而在采集用户的患侧手的健康手指的运动状态时或采集用户的健在脚趾的弯曲度时,能够有效预测假肢手指的动作,并对假肢手指进行实时控制,其能够大大提高人机交互水平,并降低穿戴式假肢手套的成本,并实现对穿戴式假肢手套的假肢手指的有效控制,其具有良好的推广前景和应用价值。
24、相应地,在本发明中,还设计了一种穿戴式假肢手套控制系统,该穿戴式假肢手套控制系统用于实施本发明上述的穿戴式假肢手套控制方法,其同样具有上述优点以及有益效果。
技术特征:
1.一种穿戴式假肢手套控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的穿戴式假肢手套控制方法,其特征在于,在步骤s1中,具体包括以下步骤:
3.根据权利要求2所述的穿戴式假肢手套控制方法,其特征在于,在步骤s2中,具体包括以下步骤:
4.根据权利要求2所述的穿戴式假肢手套控制方法,其特征在于,在步骤s1中,所述预设动作手势包括用户的常用动作手势。
5.根据权利要求2所述的穿戴式假肢手套控制方法,其特征在于,在步骤s1中,所述建立用户的患侧手的健在手指的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系,具体为:
6.根据权利要求5所述的穿戴式假肢手套控制方法,其特征在于,所述深度学习算法为rnn算法。
7.根据权利要求1所述的穿戴式假肢手套控制方法,其特征在于,在步骤s1中,具体包括以下步骤:
8.根据权利要求7所述的穿戴式假肢手套控制方法,其特征在于,所述建立用户的健在脚趾的脚趾弯曲角度与缺失手指处的假肢手指的末端指节的关节弯曲角度的映射关系,具体为:
9.一种穿戴式假肢手套控制系统,其应用于如权利要求1-8任意一项所述的穿戴式假肢手套控制方法,其特征在于,包括:数据采集手套、假肢手套、弯曲度传感器、拉线、驱动器以及控制器;
10.根据权利要求9所述的穿戴式假肢手套控制系统,其特征在于,所述假肢手指包括彼此连接的第一指骨和第二指骨,所述第一指骨和第二指骨之间的关节处集成有径向充磁的磁环与磁编码器,所述磁环随第一指骨同步转动,所述磁编码器随第二指骨同步转动,且所述磁环与所述磁编码器同心转动。
技术总结
本发明公开了一种穿戴式假肢手套控制方法,其包括步骤:S1:建立用户的健在肢体趾/指部的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系;S2:采集用户的健在肢体趾/指部的实际关节弯曲角度,并根据所述用户的健在肢体趾/指部的关节弯曲角度与缺失手指处的假肢手指的关节弯曲角度的映射关系,生成假肢运动控制指令;S3:根据假肢运动控制指令控制穿戴式假肢手套在缺失手指处的假肢手指完成相应动作。相应地,本发明还公开了一种穿戴式假肢手套控制系统,其用于实施上述穿戴式假肢手套控制方法。本发明的穿戴式假肢手套控制方法能够预测假肢手指的动作,并对假肢手指进行控制,其人机交互水平高、成本低且效果较优。
技术研发人员:张世武,金虎,随梦理,欧阳一鸣,王二龙,柴祯熠
受保护的技术使用者:中国科学技术大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!