一种磁导丝控制模型的训练方法、装置、电子设备和介质与流程
本申请涉及医疗器械,更具体地说,涉及一种磁导丝控制模型的训练方法、装置、电子设备和介质。
背景技术:
1、介入治疗的关键步骤之一是将导丝沿血管移动到病变部位,以使其将治疗设备如导管、支架等送到该病变部位。传统导丝具有预弯曲的尖端,以便在尖端的引导下使得导丝沿动脉或静脉行进并进入不同的分支。在引导导丝进入时,需要专业人员通过在近端扭转尖端的方向使得导丝保持正确的方向行进。鉴于人体血管的不规则性,这种操作极度依赖操作人员的操作经验。
2、为了降低对操作经验的依赖,目前有人提出了一种具有磁性尖端的磁性导丝。磁性尖端在磁场的驱动下实现转向,与传统导丝相比,其转向更加灵敏和可预测,但这这种转向操作也仅是将操作人员的扭转操作转为对磁场方向和强度的操作,还是需要大量的训练才能胜任,即还是需要依赖于操作人员的操作经验,对于经验不足的操作人员来说,还是无法使得磁性导丝精准进入病变部位。
技术实现思路
1、有鉴于此,本申请提供一种磁导丝控制模型的训练方法、装置、电子设备和介质,用于使得磁性导丝系统在不依赖于操作人员的操作经验的情况下精准进入病变部位。
2、为了实现上述目的,现提出的方案如下:
3、一种磁导丝控制模型的训练方法,应用于电子设备,所述训练方法包括步骤:
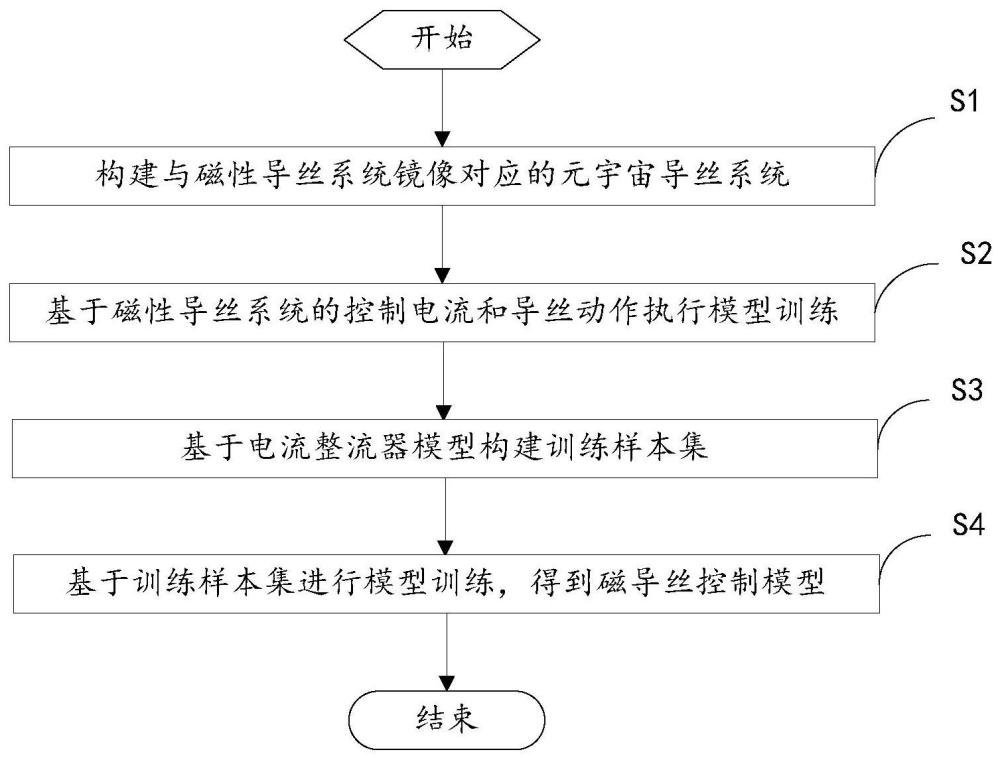
4、构建与磁性导丝系统镜像对应的元宇宙导丝系统,所述元宇宙导丝系统包括元电流和元导丝;
5、基于所述磁性导丝系统的控制电流和导丝动作执行模型训练,得到电流整流器模型;
6、基于所述电流整流器模型构建训练样本集;
7、基于所述训练样本集执行模型训练,得到用于对所述磁性导丝箱体执行控制的磁导丝控制模型。
8、可选的,所述构建与磁性导丝系统镜像对应的元宇宙导丝系统,包括步骤:
9、获取对所述磁性导丝系统的导丝进行检测所得到的导丝刚度和导丝磁化率;
10、基于所述导丝刚度、所述导丝磁化率和底层物理定律执行元宇宙构建,得到所述元宇宙导丝系统。
11、可选的,所述基于所述磁性导丝系统的控制电流和导丝动作执行模型训练,得到电流整流器模型,包括步骤:
12、生成随机分布的控制电流,记录所述磁性导丝系统中与所述控制电流的实体导丝动作;
13、将所述电流分布和所述导丝动作模拟进所述元宇宙导丝系统,记录所述元导丝的元导丝动作;
14、计算所述实体导丝动作与所述元导丝动作之间的距离损失;
15、基于所述距离损失执行模型训练,得到所述电流整流器模型。
16、可选的,所述基于所述电流整流器模型构建训练样本集,包括步骤:
17、随机生成一系列用于创建元磁场的元控制电流;
18、记录所述元控制电流和与所述元控制电流对应的元导丝形状;
19、基于多个所述元控制电力和多个所述元导丝形状执行样本构建,得到所述训练样本集。
20、一种磁导丝控制模型的训练装置,应用于电子设备,所述训练装置包括:
21、元宇宙构建模块,被配置为构建与磁性导丝系统镜像对应的元宇宙导丝系统,所述元宇宙导丝系统包括元电流和元导丝;
22、第一训练模块,被配置为基于所述磁性导丝系统的控制电流和导丝动作执行模型训练,得到电流整流器模型;
23、样本集构建模块,被配置为基于所述电流整流器模型构建训练样本集;
24、第二训练模块,被配置为基于所述训练样本集执行模型训练,得到用于对所述磁性导丝系统执行控制的磁导丝控制模型。
25、可选的,所述元宇宙构建模块包括:
26、参数获取单元,被配置为获取对所述磁性导丝系统的导丝进行检测所得到的导丝刚度和导丝磁化率;
27、第一构建单元,被配置为基于所述导丝刚度、所述导丝磁化率和底层物理定律执行元宇宙构建,得到所述元宇宙导丝系统。
28、可选的,所述第一训练模块包括:
29、第一记录单元,被配置为生成随机分布的控制电流,记录所述磁性导丝系统中与所述控制电流的实体导丝动作;
30、第二记录单元,被配置为将所述电流分布和所述导丝动作模拟进所述元宇宙导丝系统,记录所述元导丝的元导丝动作;
31、距离计算单元,被配置为计算所述实体导丝动作与所述元导丝动作之间的距离损失;
32、训练执行单元,被配置为基于所述距离损失执行模型训练,得到所述电流整流器模型。
33、可选的,所述样本集构建模块包括:
34、电流生成单元,被配置为随机生成一系列用于创建元磁场的元控制电流;
35、数据记录单元,被配置为记录所述元控制电流和与所述元控制电流对应的元导丝形状;
36、第二构建单元,被配置为基于多个所述元控制电流和多个所述元导丝形状执行样本构建,得到所述训练样本集。
37、一种电子设备,所述电子设备包括至少一个处理器和与所述处理器连接的存储器,其中:
38、所述存储器用于存储计算机程序或指令;
39、所述处理器用于执行所述计算机程序或指令,以使所述电子设备实现如上所述的磁性导丝控制模块的训练方法。
40、一种介质,应用于电子设备,,所述介质承载有一个或多个计算机程序,所述一个或多个计算机程序能够被所述电子设备执行,从而使所述电子设备实现如上所述的磁导丝控制模型的训练方法。
41、从上述的技术方案可以看出,本申请公开了一种磁导丝控制模型的训练方法、装置、电子设备和介质,该方法和装置应用于电子设备,具体为构建与磁性导丝系统镜像对应的元宇宙导丝系统,元宇宙导丝系统包括元电流和元导丝;基于磁性导丝系统的控制电流和导丝动作执行模型训练,得到电流整流器模型;基于电流整流器模型构建训练样本集;基于训练样本集执行模型训练,得到用于对磁性导丝系统执行控制的磁导丝控制模型。该磁导丝控制模型应用到磁性导丝系统时,可以使得磁性导丝在不依赖于操作人员的操作经验的情况下精准进入病变部位。
技术特征:
1.一种磁导丝控制模型的训练方法,应用于电子设备,其特征在于,所述训练方法包括步骤:
2.如权利要求1所述的训练方法,其特征在于,所述构建与磁性导丝系统镜像对应的元宇宙导丝系统,包括步骤:
3.如权利要求1所述的训练方法,其特征在于,所述基于所述磁性导丝系统的控制电流和导丝动作执行模型训练,得到电流整流器模型,包括步骤:
4.如权利要求1所述的训练方法,其特征在于,所述基于所述电流整流器模型构建训练样本集,包括步骤:
5.一种磁导丝控制模型的训练装置,应用于电子设备,其特征在于,所述训练装置包括:
6.如权利要求5所述的训练装置,其特征在于,所述元宇宙构建模块包括:
7.如权利要求5所述的训练装置,其特征在于,所述第一训练模块包括:
8.如权利要求5所述的训练装置,其特征在于,所述样本集构建模块包括:
9.一种电子设备,其特征在于,所述电子设备包括至少一个处理器和与所述处理器连接的存储器,其中:
10.一种介质,应用于电子设备,其特征在于,所述介质承载有一个或多个计算机程序,所述一个或多个计算机程序能够被所述电子设备执行,从而使所述电子设备实现如权利要求1~4任一项所述的磁导丝控制模型的训练方法。
技术总结
本申请公开了一种磁导丝控制模型的训练方法、装置、电子设备和介质,该方法和装置应用于电子设备,具体为构建与磁性导丝系统镜像对应的元宇宙导丝系统,元宇宙导丝系统包括元电流和元导丝;基于磁性导丝系统的控制电流和导丝动作执行模型训练,得到电流整流器模型;基于电流整流器模型构建训练样本集;基于训练样本集执行模型训练,得到用于对磁性导丝系统执行控制的磁导丝控制模型。该磁导丝控制模型应用到磁性导丝系统时,可以使得磁性导丝在不依赖于操作人员的操作经验的情况下精准进入病变部位。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京思博慧医科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!