电极植入装置及耳蜗手术机器人的制作方法
本发明涉及耳蜗手术,尤其涉及一种电极植入装置及耳蜗手术机器人。
背景技术:
1、人工耳蜗技术是把人工耳蜗作为治疗重度聋至全聋的方法。人工耳蜗是根据耳蜗生理原理开发的一种电子仿生装置,是听力学、医学、生物医学、微电子学、材料学、机械学相结合的跨多学科的高新技术产品。人工耳蜗可以代替病变受损的听觉器官,由体外言语处理器将声音转换为一定编码形式的电信号传入人体的耳蜗,通过植入体内的电极刺激分布在那里的听神经纤维,直接兴奋听神经,来恢复或重建聋人的听觉功能。人工耳蜗是现代医学的重要成果之一,对于轻度到中重度的听力损失,助听器可以有较好的补偿效果,而对于重度或极重度耳聋,人工耳蜗的植入是国际公认的能使双侧重度或极重度感音神经性聋患者恢复听觉的唯一有效装置。近年来,随着电子技术、计算机技术、语音学、电生理学、材料学、耳显微外科学的发展,人工耳蜗已经从实验研究进入临床应用。
2、现有技术中,人工耳蜗主要包括电极接收端、电极导线及电极。在人工耳蜗手术过程中,电极植入的步骤是在将人工耳蜗的电极接收端植入耳后皮下后,将电极插入患者耳蜗内的过程。现有技术中,这一过程普遍采用手动植入,对手术操作者的要求较高,无法避免手术操作者的抖动,植入速度不稳定,可能会对耳蜗造成损伤。
技术实现思路
1、本发明的目的在于提供一种电极植入装置及耳蜗手术机器人,能通过较小的开放性创口植入电极,植入路径稳定,植入速度均匀,操作简单,减少植入损伤,缩短康复周期。
2、为达此目的,本发明采用以下技术方案:
3、第一方面,本发明公开了一种电极植入装置,包括:
4、壳体;
5、导向管模块,所述导向管模块与所述壳体连通,所述导向管模块包括植入端,所述植入端能选择性地置于电极植入通道;
6、驱动模块,所述驱动模块设置在所述壳体内,所述驱动模块被配置为能与电极抵接,且能选择性地驱动所述电极沿所述导向管模块的延伸方向移动以通过所述导向管模块;
7、从动模块,所述从动模块设置在所述壳体内,所述从动模块包括从动轮,所述从动轮被配置为能与所述电极抵接,且当所述电极发生移动时所述电极带动所述从动轮自转。
8、作为电极植入装置的优选技术方案,所述驱动模块包括压电陶瓷和柔性铰链,所述柔性铰链绕设于所述压电陶瓷的外周,所述柔性铰链包括放置端,所述放置端与所述电极接触;所述压电陶瓷被配置为能选择性地通电以产生形变,当所述压电陶瓷产生形变时,所述放置端驱动所述电极沿所述导向管模块的延伸方向移动。
9、作为电极植入装置的优选技术方案,所述电极植入装置包括控制模块,所述控制模块被配置为能控制所述压电陶瓷的通电电压以改变所述放置端的驱动方向;所述控制模块包括控制按钮,所述控制按钮设置于所述壳体。
10、作为电极植入装置的优选技术方案,所述壳体包括可拆卸设置地上壳和下壳,所述驱动模块和所述从动模块均设置在所述下壳。
11、作为电极植入装置的优选技术方案,所述壳体包括电极限位件,所述电极限位件可拆卸地设置在所述上壳,所述电极限位件被配置为能选择性地覆盖并抵接所述电极。
12、作为电极植入装置的优选技术方案,所述电极限位件设置为透明状。
13、作为电极植入装置的优选技术方案,所述从动模块包括固定件、连接件和预压弹性件,所述预压弹性件的两端分别与所述壳体和所述连接件固定连接,所述固定件与所述壳体固定连接,所述连接件与所述固定件转动连接,所述连接件远离所述预压弹性件的一端与所述从动轮转动连接。
14、作为电极植入装置的优选技术方案,所述从动模块包括电极释放按钮,所述电极释放按钮与所述预压弹性件连接,部分所述电极释放按钮设置于所述壳体的外侧。
15、作为电极植入装置的优选技术方案,所述电极植入装置包括防护模块,所述防护模块与所述壳体连接,所述防护模块与所述驱动模块通讯连接,所述防护模块被配置为能摒除静电和电磁对所述驱动模块的干扰。
16、第二方面,本发明公开了一种耳蜗手术机器人,包括如以上任一项所述的电极植入装置,所述耳蜗手术机器人还包括机械臂、扫描装置和骨钻装置,所述电极植入装置可拆卸地设置在所述机械臂,所述骨钻装置可拆卸地设置在所述机械臂,所述骨钻装置与所述电极植入装置择一与所述机械臂连接,所述扫描装置与所述机械臂通讯连接。
17、本发明的有益效果:
18、本发明提供了一种电极植入装置及耳蜗手术机器人,首先通过耳蜗手术机器人的扫描装置对耳蜗结构进行扫描并规划电极植入通道的位置;然后将骨钻装置与耳蜗手术机器人的机械臂组装,骨钻装置按照规划钻制电极植入通道,为了减少对患者的额外损伤,减短康复周期,电极植入通道孔径较小;配合可拆卸地设置在机械臂上的电极植入装置,电极植入装置包括壳体、导向管模块、驱动模块和从动模块,导向管模块与壳体连通,导向管模块包括植入端,植入端能选择性地置于电极植入通道,电极植入路径稳定;设置在壳体内的驱动模块与电极抵接,驱动模块能选择性地驱动电极沿导向管模块的延伸方向移动以通过导向管模块植入耳蜗内,避免人工植入造成抖动,操作简单,植入速度均匀;从动模块设置在壳体内,包括与电极抵接的从动轮,当电极发生移动时电极带动从动轮自转,进一步稳定了电极的植入动作;最后分离电极与电极植入装置并固定电极,完成电极植入,愈后效果良好。
技术特征:
1.电极植入装置,其特征在于,包括:
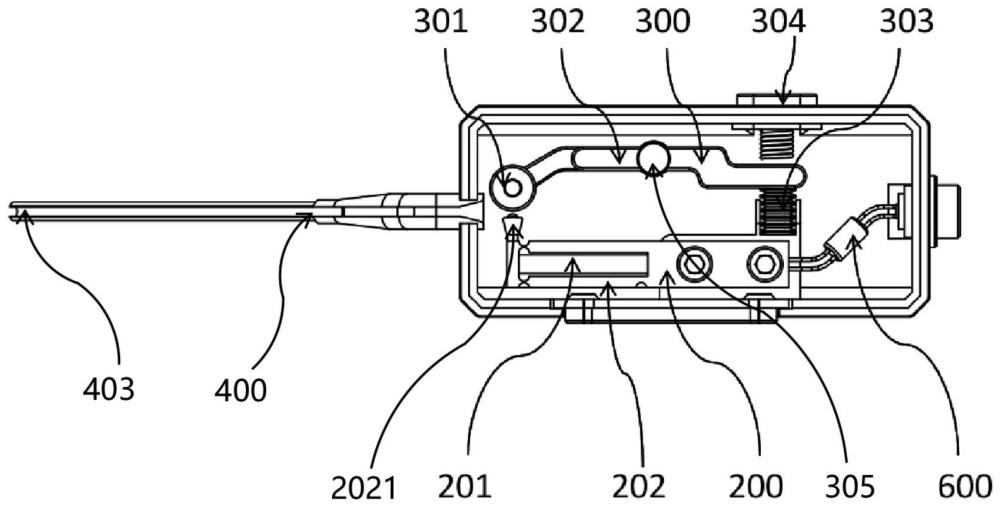
2.根据权利要求1所述的电极植入装置,其特征在于,所述驱动模块(200)包括压电陶瓷(201)和柔性铰链(202),所述柔性铰链(202)绕设于所述压电陶瓷(201)的外周,所述柔性铰链(202)包括放置端(2021),所述放置端(2021)与所述电极接触;所述压电陶瓷(201)被配置为能选择性地通电以产生形变,当所述压电陶瓷(201)产生形变时,所述放置端(2021)驱动所述电极沿所述导向管模块(400)的延伸方向移动。
3.根据权利要求2所述的电极植入装置,其特征在于,所述电极植入装置(1)包括控制模块,所述控制模块被配置为能控制所述压电陶瓷(201)的通电电压以改变所述放置端(2021)的驱动方向;所述控制模块包括控制按钮(500),所述控制按钮(500)设置于所述壳体(100)。
4.根据权利要求1所述的电极植入装置,其特征在于,所述壳体(100)包括可拆卸设置地上壳(102)和下壳(101),所述驱动模块(200)和所述从动模块(300)均设置在所述下壳(101)。
5.根据权利要求4所述的电极植入装置,其特征在于,所述壳体(100)包括电极限位件,所述电极限位件可拆卸地设置在所述上壳(102),所述电极限位件被配置为能选择性地覆盖并抵接所述电极。
6.根据权利要求5所述的电极植入装置,其特征在于,所述电极限位件设置为透明状。
7.根据权利要求1所述的电极植入装置,其特征在于,所述从动模块(300)包括固定件(305)、连接件(302)和预压弹性件(303),所述预压弹性件(303)的两端分别与所述壳体(100)和所述连接件(302)固定连接,所述固定件(305)与所述壳体(100)固定连接,所述连接件(302)与所述固定件(305)转动连接,所述连接件(302)远离所述预压弹性件(303)的一端与所述从动轮(301)转动连接。
8.根据权利要求7所述的电极植入装置,其特征在于,所述从动模块(300)包括电极释放按钮(304),所述电极释放按钮(304)与所述预压弹性件(303)连接,部分所述电极释放按钮(304)设置于所述壳体(100)的外侧。
9.根据权利要求1所述的电极植入装置,其特征在于,所述电极植入装置(1)包括防护模块(600),所述防护模块(600)与所述壳体(100)连接,所述防护模块(600)与所述驱动模块(200)通讯连接,所述防护模块(600)被配置为能摒除静电和电磁对所述驱动模块(200)的干扰。
10.耳蜗手术机器人,其特征在于,包括如权利要求1-9任一项所述的电极植入装置(1),所述耳蜗手术机器人还包括机械臂(2)、扫描装置和骨钻装置,所述电极植入装置(1)可拆卸地设置在所述机械臂(2),所述骨钻装置可拆卸地设置在所述机械臂(2),所述骨钻装置与所述电极植入装置(1)择一与所述机械臂(2)连接,所述扫描装置与所述机械臂(2)通讯连接。
技术总结
本发明涉及耳蜗手术技术领域,公开了一种电极植入装置及耳蜗手术机器人。首先为减少患者的额外损伤,减短康复周期,对耳蜗结构进行扫描规划并钻制孔径较小的电极植入通道;配合能与耳蜗手术机器人的机械臂连接的电极植入装置,将导向管模块的植入端选择性地置于电极植入通道内,稳定电极植入路径;设置在壳体内的驱动模块与电极抵接,驱动模块能选择性地驱动电极沿导向管模块的延伸方向移动以通过导向管模块植入耳蜗内,避免人工植入造成抖动,操作简单,植入速度均匀;同时从动模块设置在壳体内,包括与电极抵接的从动轮,当电极发生移动时电极带动从动轮自转,进一步稳定了电极的植入动作,愈后效果良好。
技术研发人员:于洪健,柯作伟,肖景文,史鹏,苏衍宇
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!