一种基于多参数融合的计步和姿态识别方法和装置与流程
本发明涉及智能计步,特别是涉及一种基于多参数融合的计步和姿态识别方法和装置。
背景技术:
1、随着人们生活水平的提高和健康意识的增强,智能穿戴设备越来越受到人们的青睐。其中,计步器和运动手表等设备能够监测和分析人们的运动数据,如步数、距离、卡路里消耗等,帮助人们更好地了解自己的身体状况和运动效果。然而,现有的计步器和运动手表往往只能简单地监测步数,由于他们佩戴过程中容易受手部动作的干扰,引起计步不准,无法准确地判断用户的行走状态和运动姿态,从而影响了监测数据的准确性和可靠性。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于多参数融合的计步和姿态识别方法和装置,能够提高监测数据的准确性。
2、本发明解决其技术问题所采用的技术方案是:提供一种基于多参数融合的计步和姿态识别方法,包括以下步骤:
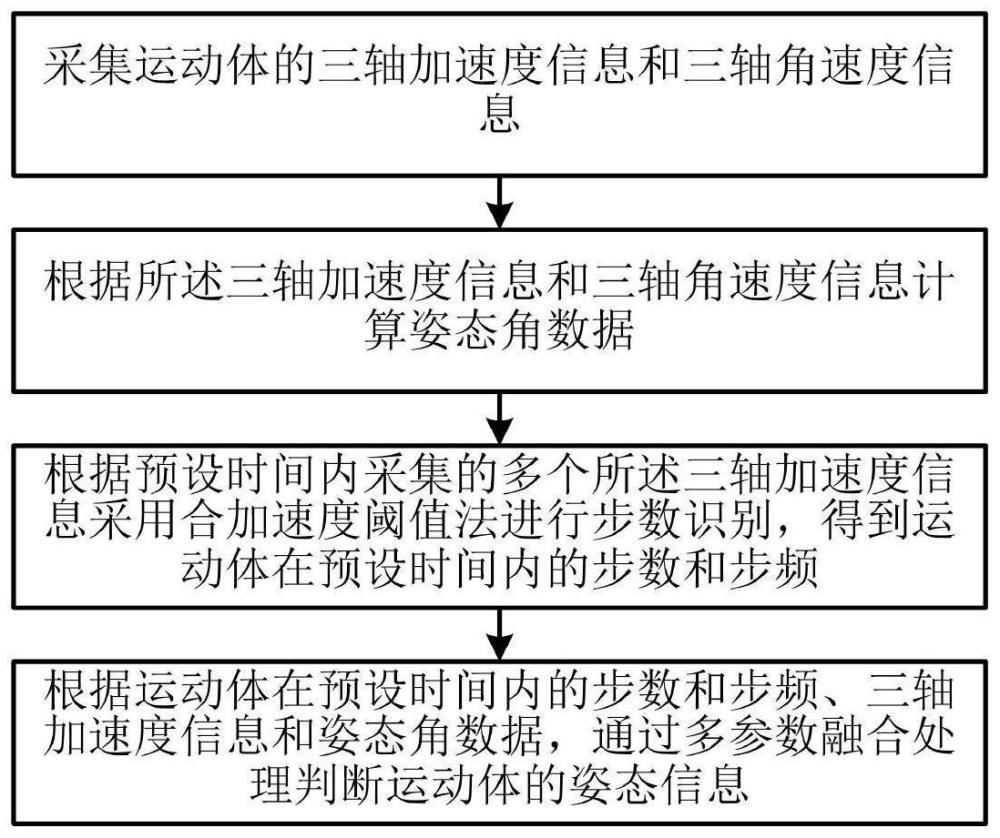
3、采集运动体的三轴加速度信息和三轴角速度信息;
4、根据所述三轴加速度信息和三轴角速度信息计算姿态角数据;
5、根据预设时间内采集的多个所述三轴加速度信息采用合加速度阈值法进行步数识别,得到运动体在预设时间内的步数和步频;
6、根据运动体在预设时间内的步数和步频、三轴加速度信息和姿态角数据,通过多参数融合处理判断运动体的姿态信息。
7、所述根据所述三轴加速度信息和三轴角速度信息计算姿态角数据具体为:利用四元数方法和互补滤波处理实时准确计算姿态角数据。
8、所述四元数表达式为:q=q0+q1i+q2j+q3k;所述姿态角数据通过计算得到,其中,q表示四元数,q0=cos(α/2)、q1=sin(α/2)cos(φ)、q2=sin(α/2)cos(θ),q3=sin(α/2)cos(ψ),i,j,k为虚数单位,α为采集设备与重力方向的夹角,φ为绕x轴的角度,θ为绕y轴的角度,ψ为绕z轴的角度。
9、所述互补滤波处理是指将三轴加速度信息计算的计算姿态角数据和三轴角速度信息计算的姿态角数据进行互补加权处理。
10、所述根据预设时间内采集的多个所述三轴加速度信息采用合加速度阈值法进行步数识别,得到运动体在预设时间内的步数和步频,具体包括:
11、根据所述三轴加速度信息计算合加速度,得到预设时间内的多个合加速度;
12、通过自动门限选取多个合加速度的极值点,并将选出的极值点作为候选极值点;
13、将相邻候选极值点的横向距离小于距离阈值且相邻候选极值点的幅值差小于幅值阈值的候选极值点删除,得到最终极值点;
14、将最终极值点的数量作为预设时间内的步数,并根据步数计算步频。
15、所述自动门限通过以下方式得到:其中,auto_thr为自动门限,k门限因子,xn表示确定的前n个极值点幅值。
16、本发明解决其技术问题所采用的技术方案是:提供一种基于多参数融合的计步和姿态识别装置,包括:
17、采集模块,用于采集运动体的三轴加速度信息和三轴角速度信息;
18、姿态角计算模块,用于根据所述三轴加速度信息和三轴角速度信息计算姿态角数据;
19、步数计算模块,用于根据预设时间内采集的多个所述三轴加速度信息采用合加速度阈值法进行步数识别,得到运动体在预设时间内的步数和步频;
20、姿态判断模块,用于根据运动体在预设时间内的步数和步频、三轴加速度信息和姿态角数据,通过多参数融合处理判断运动体的姿态信息。
21、本发明解决其技术问题所采用的技术方案是:提供一种电子设备,包括存储器、处理器及存储在存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述基于多参数融合的计步和姿态识别方法的步骤。
22、本发明解决其技术问题所采用的技术方案是:提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述基于多参数融合的计步和姿态识别方法的步骤。
23、有益效果
24、由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明通过采用多参数融合技术,通过对三轴加速度信息和其他参数的综合分析,实现了对步数和姿态的准确识别,通过自动门限的更新算法,提高了算法的自适应能力,使得整个系统的准确性和抗干扰性较强,非常适合对人员健康运动量评估和健康监测领域。
技术特征:
1.一种基于多参数融合的计步和姿态识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于多参数融合的计步和姿态识别方法,其特征在于,所述根据所述三轴加速度信息和三轴角速度信息计算姿态角数据具体为:利用四元数方法和互补滤波处理实时准确计算姿态角数据。
3.根据权利要求2所述的基于多参数融合的计步和姿态识别方法,其特征在于,所述四元数表达式为:q=q0+q1i+q2j+q3k;所述姿态角数据通过计算得到,其中,q表示四元数,q0=cos(α/2)、q1=sin(α/2)cos(φ)、q2=sin(α/2)cos(θ),q3=sin(α/2)cos(ψ),i,j,k为虚数单位,α为采集设备与重力方向的夹角,φ为绕x轴的角度,θ为绕y轴的角度,ψ为绕z轴的角度。
4.根据权利要求2所述的基于多参数融合的计步和姿态识别方法,其特征在于,所述互补滤波处理是指将三轴加速度信息计算的计算姿态角数据和三轴角速度信息计算的姿态角数据进行互补加权处理。
5.根据权利要求1所述的基于多参数融合的计步和姿态识别方法,其特征在于,所述根据预设时间内采集的多个所述三轴加速度信息采用合加速度阈值法进行步数识别,得到运动体在预设时间内的步数和步频,具体包括:
6.根据权利要求5所述的基于多参数融合的计步和姿态识别方法,其特征在于,所述自动门限通过以下方式得到:其中,auto_thr为自动门限,k门限因子,xn表示确定的前n个极值点幅值。
7.一种基于多参数融合的计步和姿态识别装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-6中任一所述基于多参数融合的计步和姿态识别方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-6中任一所述基于多参数融合的计步和姿态识别方法的步骤。
技术总结
本发明涉及一种基于多参数融合的计步和姿态识别方法,包括以下步骤:采集运动体的三轴加速度信息和三轴角速度信息;根据所述三轴加速度信息和三轴角速度信息计算姿态角数据;根据预设时间内采集的多个所述三轴加速度信息采用合加速度阈值法进行步数识别,得到运动体在预设时间内的步数和步频;根据运动体在预设时间内的步数和步频、三轴加速度信息和姿态角数据,通过多参数融合处理判断运动体的姿态信息。本发明能够提高监测数据的准确性。
技术研发人员:罗炬锋,翟华伟,王淼,杨旭光,偰超,吴俊奕,单联海
受保护的技术使用者:上海物联网有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!