设备定位方法、装置、电子设备及非易失性存储介质与流程
本申请涉及导航,具体而言,涉及一种设备定位方法、装置、电子设备及非易失性存储介质。
背景技术:
1、在医疗活动中,可将柔性器械伸入生理通道(例如气管),并沿生理通道运动至病灶区域,并在到达病灶区域后实现治疗、探测等活动。在柔性器械的运动过程中,需要对柔性器械进行定位导航。
2、相关技术中在实现对柔性器械的导航时,常用的方法是当柔性器械在生理通道中移动的过程中,不断采集生理通道的图像,并通过图像配准实现导航,然而这种方法虽然在生理通道的分岔口等特征明显的部位可以准确确定柔性器械末端的位置,但是在生理通道中间等特征不明显的部位所获取到的图像往往特征较少而无法准确确定柔性器械末端的位置,另外,还可能由于柔性器械运动过快、相机帧数低等因素造成获取到的图像中存在大量模糊、光斑,从而导致柔性器械末端的定位准确性不佳的问题。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本申请实施例提供了一种设备定位方法、装置、电子设备及非易失性存储介质,以至少解决由于在对柔性器械导航过程中获取到的图像特征不明显而无法识别,造成的柔性器械的定位准确性不佳的技术问题。
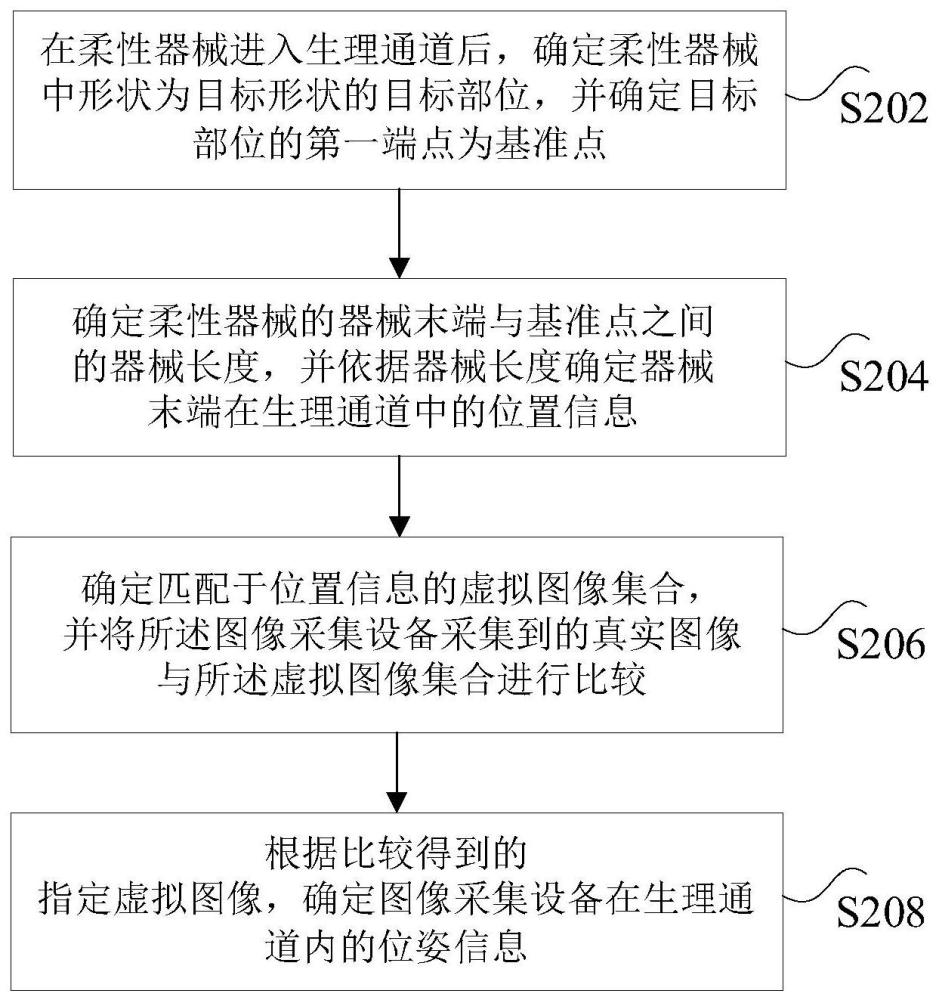
2、根据本申请实施例的一个方面,提供了一种设备导航方法,包括:在柔性器械进入生理通道后,确定柔性器械中形状为目标形状的目标部位,并确定目标部位的第一端点为基准点,其中,第一端点为目标部位中更靠近图像采集设备的端点,图像采集设备位于生理通道中并且与柔性器械的器械末端连接;确定柔性器械的器械末端与基准点之间的器械长度,并依据器械长度确定器械末端在生理通道中的位置信息;确定匹配于位置信息的虚拟图像集合,并将图像采集设备采集到的真实图像与虚拟图像集合进行比较,其中,虚拟图像集合包括对应于生理通道的若干虚拟图像;根据比较得到的指定虚拟图像,确定图像采集设备在生理通道内的位姿信息。
3、可选地,确定柔性器械中形状为目标形状的目标部位的步骤包括:确定柔性器械中各个点的曲率值;依据曲率值在柔性器械中确定目标部位的第二端点的当前位置信息,其中,第二端点为柔性器械的曲率值峰值点,并且第二端点为目标部位中远离柔性器械的器械末端的端点;依据第二端点对应的当前曲率值确定目标部位的长度;依据长度确定目标部位的第一端点,并得到包含第一端点和第二端点的目标部位。
4、可选地,依据曲率值在柔性器械中确定目标部位的第二端点的位置信息的步骤包括:获取第一时刻第二端点的第一位置信息;依据第一位置信息在柔性器械中确定检索范围;在检索范围内确定第二时刻柔性器械上与第一位置信息距离最近的目标曲率值峰值点,其中,目标曲率值峰值点的位置信息为第二时刻第二端点的当前位置信息,第二时刻为图像采集装置采集真实图像的时刻,第二时刻为位于第一时刻之后并且与第一时刻紧邻的时刻。
5、可选地,依据第二端点对应的当前曲率值确定目标部位的长度的步骤包括:获取目标回归模型,目标回归模型用于表征第二端点对应的曲率值与目标部位的长度之间的关联关系;结合目标回归模型和第二端点对应的当前曲率值,计算得到目标部位的长度。
6、可选地,依据器械长度确定器械末端在生理通道中的位置信息的步骤包括:确定生理通道中与基准点对应的第一特征点;依据器械长度确定目标长度;以第一特征点为基准,在生理通道的中心线中确定第二特征点,其中,第二特征点和第一特征点之间的中心线长度为目标长度;确定第二特征点的位置信息为器械末端在生理通道中的位置信息。
7、可选地,依据器械长度确定目标长度的步骤包括:在器械末端位于生理通道的第一类分支通道中的情况下,确定目标长度等于器械长度;在器械末端位于生理通道的第二类分支通道的情况下,通过目标神经网络确定器械长度和目标长度之间的差值;通过差值和器械长度确定目标长度。
8、可选地,目标神经网络模型通过以下方式获取:获取训练数据集,其中,训练数据集中包括多个历史时刻生理通道对应的器械长度和目标长度之间的差值,生理通道中的目标位置所在的部位,以及历史时刻每个生理通道中的柔性器械的形状特征信息,形状特征信息包括以下至少之一:柔性器械中的分岔曲率值峰值点在多个时刻对应的曲率值信息,柔性器械中目标部位的长度,分岔曲率值峰值点为柔性器械在生理通道的分岔处产生的曲率值峰值点;确定待训练神经网络模型;依据训练数据集调整待训练神经网络模型的模型参数,得到目标神经网络模型。
9、可选地,根据图像采集设备采集到的真实图像与指定虚拟图像,确定图像采集设备在生理通道内的位姿信息的步骤之后,设备定位方法还包括:依据位姿信息和指定虚拟图像生成导航信息,其中,导航信息包括柔性器械末端在生理通道内部移动到目标位置处的剩余路径信息。
10、根据本申请实施例的另一个方面,还提供了一种设备导航装置,包括:检索模块,用于在柔性器械进入生理通道后,确定柔性器械中形状为目标形状的目标部位,并确定目标部位的第一端点为基准点,其中,第一端点为目标部位中更靠近图像采集设备的端点,图像采集设备位于生理通道中并且与柔性器械的器械末端连接;计算模块,用于确定柔性器械的器械末端与基准点之间的器械长度,并依据器械长度确定器械末端在生理通道中的位置信息;第一处理模块,用于确定匹配于位置信息的虚拟图像集合,并将图像采集设备采集到的真实图像与虚拟图像集合进行比较,其中,虚拟图像集合包括对应于生理通道的若干虚拟图像;第二处理模块,用于根据比较得到的指定虚拟图像,确定图像采集设备在生理通道内的位姿信息。
11、根据本申请实施例的又一方面,还提供了一种电子设备,电子设备包括处理器,处理器用于运行程序,其中,程序运行时执行设备导航方法。
12、根据本申请实施例的再一方面,还提供了一种非易失性存储介质,非易失性存储介质包括存储的计算机程序,其中,非易失性存储介质所在设备通过运行计算机程序执行设备导航方法。
13、在本申请实施例中,采用在柔性器械进入生理通道后,确定柔性器械中形状为目标形状的目标部位,并确定目标部位的第一端点为基准点,其中,第一端点为目标部位中更靠近图像采集设备的端点,图像采集设备位于生理通道中并且与柔性器械的器械末端连接;确定柔性器械的器械末端与基准点之间的器械长度,并依据器械长度确定器械末端在生理通道中的位置信息;确定匹配于位置信息的虚拟图像集合,并将图像采集设备采集到的真实图像与虚拟图像集合进行比较,其中,虚拟图像集合包括对应于生理通道的若干虚拟图像;根据比较得到的指定虚拟图像,确定图像采集设备在生理通道内的位姿信息的方式,通过利用光纤融合图像算法,在丢失或错配时提供额外位置信息以快速纠正虚拟支气管镜计算的位置与显示的图像,达到了保证自动导航的准确性与连贯性,提升柔性器械末端位置计算速率与精度的目的,进而解决了由于在对柔性器械导航过程中获取到的图像特征不明显而无法识别,造成的柔性器械的定位准确性不佳技术问题。
技术特征:
1.一种设备定位方法,其特征在于,包括:
2.根据权利要求1所述的设备定位方法,其特征在于,所述确定所述柔性器械中形状为目标形状的目标部位的步骤包括:
3.根据权利要求2所述的设备定位方法,其特征在于,所述依据所述曲率值在所述柔性器械中确定所述目标部位的第二端点的当前位置信息的步骤包括:
4.根据权利要求2所述的设备定位方法,其特征在于,所述依据所述第二端点对应的当前曲率值确定所述目标部位的长度的步骤包括:
5.根据权利要求1所述的设备定位方法,其特征在于,所述依据所述器械长度确定所述器械末端在所述生理通道中的位置信息的步骤包括:
6.根据权利要求5所述的设备定位方法,其特征在于,所述依据所述器械长度确定目标长度的步骤包括:
7.根据权利要求6所述的设备定位方法,其特征在于,所述目标神经网络模型通过以下方式获取:
8.根据权利要求1所述的设备定位方法,其特征在于,所述根据所述图像采集设备采集到的真实图像与所述指定虚拟图像,确定所述图像采集设备在所述生理通道内的位姿信息的步骤之后,所述设备定位方法还包括:
9.一种设备定位装置,其特征在于,包括:
10.一种非易失性存储介质,其特征在于,所述非易失性存储介质中存储有程序,其中,在所述程序运行时控制所述非易失性存储介质所在设备执行权利要求1至8中任意一项所述设备定位方法。
11.一种电子设备,其特征在于,包括:存储器和处理器,所述处理器用于运行存储在所述存储器中的程序,其中,所述程序运行时执行权利要求1至8中任意一项所述的设备定位方法。
技术总结
本申请公开了一种设备定位方法、装置、电子设备及非易失性存储介质。其中,该方法包括:在柔性器械进入生理通道后,确定柔性器械中形状为目标形状的目标部位,并确定目标部位的第一端点为基准点;确定柔性器械的器械末端与基准点之间的器械长度,并依据器械长度确定器械末端在生理通道中的位置信息;确定虚拟图像集合中匹配于位置信息的指定虚拟图像,其中,虚拟图像集合包括基于生理通道的通道模型而获得的若干虚拟图像;根据图像采集设备采集到的真实图像与指定虚拟图像,确定图像采集设备在生理通道内的位姿信息。本申请解决了由于在对柔性器械导航过程中获取到的图像特征不明显而无法识别,造成的柔性器械的定位准确性不佳的技术问题。
技术研发人员:卫俣安,杨志明,孙晶晶,徐宏
受保护的技术使用者:杭州堃博生物科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!