一种移动式步行训练机器人的制作方法
本技术涉及医疗康复训练设备,尤其是指一种移动式步行训练机器人。
背景技术:
1、近年来,由于骨髓损伤、脑外伤、脑瘫、帕金森氏病等神经性病变及下肢肌肉、关节损伤等引起的下肢运动功能障碍越来越多,极大的危害着人类健康。移动式步态训练机器人是运用电动升降及吊带提供减重力,减轻患者身体施加在下肢的重量,让使用者在安全的环境下进行步行、平衡、站立等运动能力的恢复训练。使用者所需的减重力,在治疗期和恢复期的不同的阶段是不一样的。在申请号为cn201820351430.1、申请名称为一种下肢康复机器人悬吊减重装置的专利申请中公开了包括机架,以及完全减重模块和动态减重模块。完全减重模块,主要包括悬吊直线驱动装置、第一滑轮组。动态减重模块,主要包括弹簧力调节直线驱动装置、弹簧。此专利申请中的悬吊减重装置的结构复杂,应用于移动式步态训练机器人所需的安装空间大且移动式步态训练机器人移动不便,增加了移动式步态训练机器人的生产成本;此专利申请缺少对减重力的变化进行实时检测的传感器,无法准确判断使用者所需要的减重力的大小,不利于医护人员根据实际情况对使用者的减重步态训练过程中的减重力进行调节;此专利申请中的悬吊架的高度无法与不同身高的使用者相适应,实用性和利用率差。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现思路
1、为了解决上述技术问题,本实用新型的目的在于提供一种移动式步行训练机器人。
2、为了实现上述目的,本实用新型采用如下技术方案:
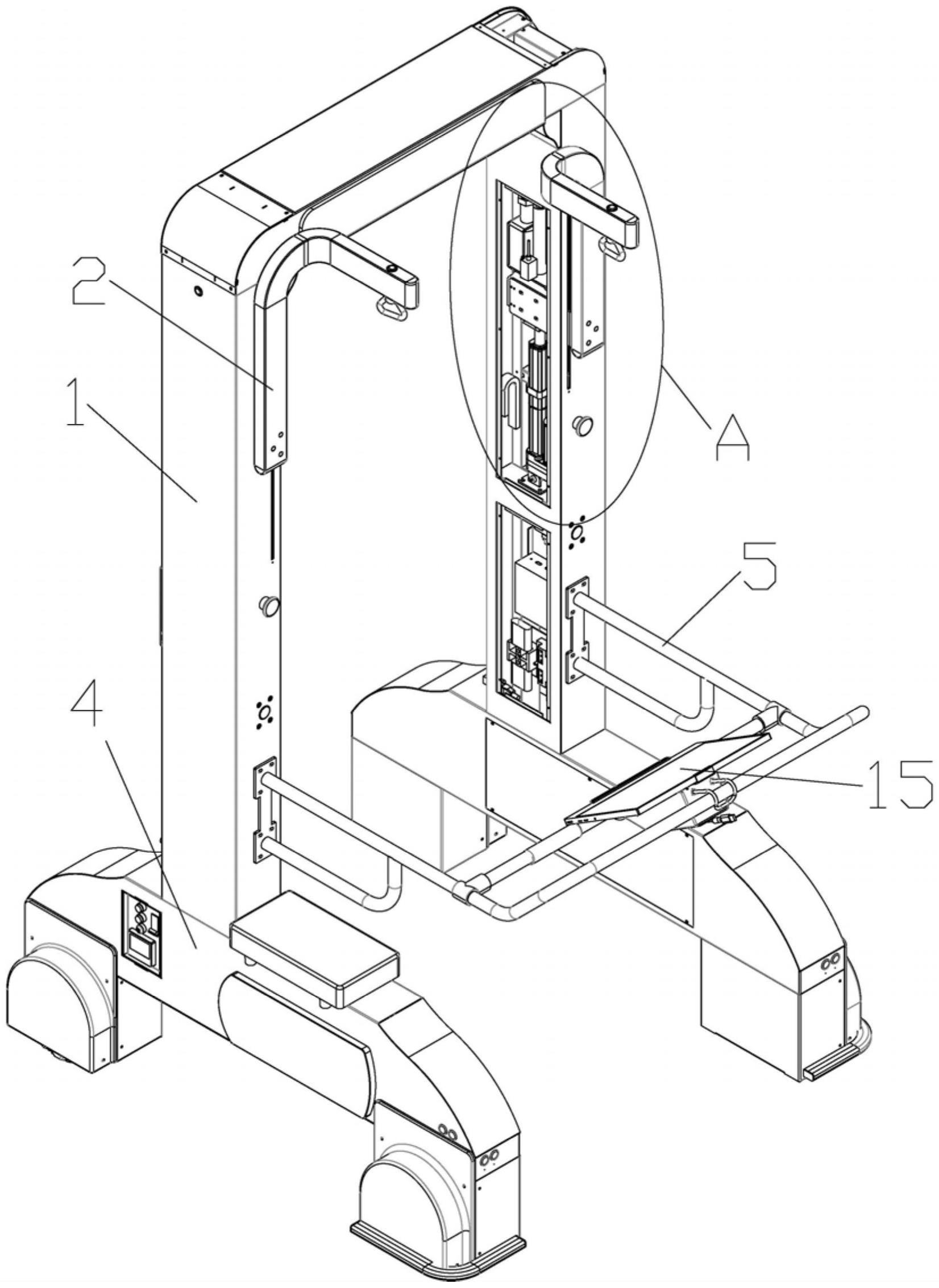
3、一种移动式步行训练机器人,其包括机架、升降地滑动设置于机架上的吊臂组件、设置于机架内的动态减重装置、设置于机架的底端的麦克纳姆轮装置及设置于机架上的扶手组件,所述动态减重装置包括推板、第一安装座、连接于吊臂组件的第二安装座、连接于机架的第三安装座、连接于推板和第一安装座的弹性结构、连接于第二安装座和第三安装座的拉绳、设置于第三安装座上的驱动机构及连接于第一安装座和第二安装座的第一传感器,所述驱动机构依次贯穿第二安装座和第一安装座并分别与第二安装座和第一安装座滑动连接,所述驱动机构的输出端与推板连接。
4、进一步地,所述移动式步行训练机器人还包括集成控制模块、与集成控制模块电连接的无线通信模块及挂设与机架上的手持遥控器,所述集成控制模块分别与动态减重装置和麦克纳姆轮装置电连接,所述手持遥控器通过无线通信模块与集成控制模块通信。
5、进一步地,所述移动式步行训练机器人还包括设置于麦克纳姆轮装置或机架的一侧的第二传感器,所述第二传感器与集成控制模块电连接。
6、进一步地,所述机架的正视投影结构呈倒凵形。
7、进一步地,所述移动式步行训练机器人还包括调节装置,所述机架经由调节装置与第三安装座连接;所述调节装置用于调节第三安装座在机架内的高度。
8、进一步地,所述动态减重装置还包括与第二安装座连接的滑动块及与滑动块滑动连接的滑动轨道;所述滑动轨道装设于机架上。
9、进一步地,所述动态减重装置还包括连接于第一安装座和推板的阻尼器。
10、进一步地,所述拉绳包括一端与第二安装座固定连接的绳本体及设置于绳本体的另一端绳结,所述绳结由绳本体的另一端贯穿第三安装座后缠绕而成,所述绳本体与第三安装座滑动连接。
11、进一步地,所述第二安装座包括第一安装板、第二安装板及第三安装板,所述第一安装板和第二安装板分别与第三安装板连接;所述第一安装板、第二安装板和第三安装板两两垂直设置;所述第一安装板与滑动块连接,所述第三安装板分别与拉绳和第一传感器连接;所述第二安装板与吊臂组件连接。
12、进一步地,所述驱动机构包括驱动组件及设置于驱动组件的输出端的推动杆,所述驱动组件的壳体依次贯穿第二安装座和第一安装座并分别与第二安装座和第一安装座滑动连接,所述推动杆与推板连接。
13、本实用新型的有益效果:本实用新型通过弹性结构因使用者的重心上下偏移过程所产生的拉力变化来实现动态减重。通过拉绳拉住第二安装座,不但便于第二安装座与第三安装座之间的活动连接,还能避免拉绳在减重过程中对第二安装座产生反作用力,进而保障了动态减重的稳定进行。动态减重装置的结构简单、紧凑,将动态减重装置装设于机架内,减少了机架体积,减少了移动式步态训练机器人的空间占用率,移动式步态训练机器人的移动和通行方便;通过第一传感器实时监测弹性结构的拉力的数值,便于医院人员进行观测、记录及调节驱动机构带动推动杆向上推动推板的高度,从而对弹性结构作用于第二安装座上的拉力进行调节,进而精准地调节减重力,使得减重力与使用者的不同恢复阶段和恢复状态相适应。
技术特征:
1.一种移动式步行训练机器人,其特征在于:包括机架(1)、升降地滑动设置于机架(1)上的吊臂组件(2)、设置于机架(1)内的动态减重装置(3)、设置于机架(1)的底端的麦克纳姆轮装置(4)及设置于机架(1)上的扶手组件(5),所述动态减重装置(3)包括推板(6)、第一安装座(7)、连接于吊臂组件(2)的第二安装座(8)、连接于机架(1)的第三安装座(9)、连接于推板(6)和第一安装座(7)的弹性结构(10)、连接于第二安装座(8)和第三安装座(9)的拉绳(13)、设置于第三安装座(9)上的驱动机构(11)及连接于第一安装座(7)和第二安装座(8)的第一传感器(12),所述驱动机构(11)依次贯穿第二安装座(8)和第一安装座(7)并分别与第二安装座(8)和第一安装座(7)滑动连接,所述驱动机构(11)的输出端与推板(6)连接。
2.根据权利要求1所述的一种移动式步行训练机器人,其特征在于:所述移动式步行训练机器人还包括集成控制模块(15)、与集成控制模块(15)电连接的无线通信模块及挂设与机架(1)上的手持遥控器(16),所述集成控制模块(15)分别与动态减重装置(3)和麦克纳姆轮装置(4)电连接,所述手持遥控器(16)通过无线通信模块与集成控制模块(15)通信。
3.根据权利要求2所述的一种移动式步行训练机器人,其特征在于:所述移动式步行训练机器人还包括设置于麦克纳姆轮装置(4)或机架(1)的一侧的第二传感器,所述第二传感器与集成控制模块(15)电连接。
4.根据权利要求1所述的一种移动式步行训练机器人,其特征在于:所述机架(1)的正视投影结构呈倒凵形。
5.根据权利要求1-4任意一项所述的一种移动式步行训练机器人,其特征在于:所述移动式步行训练机器人还包括调节装置(17),所述机架(1)经由调节装置(17)与第三安装座(9)连接;所述调节装置(17)用于调节第三安装座(9)在机架(1)内的高度。
6.根据权利要求1所述的一种移动式步行训练机器人,其特征在于:所述动态减重装置(3)还包括与第二安装座(8)连接的滑动块(18)及与滑动块(18)滑动连接的滑动轨道(19);所述滑动轨道(19)装设于机架(1)上。
7.根据权利要求1所述的一种移动式步行训练机器人,其特征在于:所述动态减重装置(3)还包括连接于第一安装座(7)和推板(6)的阻尼器(20)。
8.根据权利要求1所述的一种移动式步行训练机器人,其特征在于:所述拉绳(13)包括一端与第二安装座(8)固定连接的绳本体(26)及设置于绳本体(26)的另一端绳结(22),所述绳结(22)由绳本体(26)的另一端贯穿第三安装座(9)后缠绕而成,所述绳本体(26)与第三安装座(9)滑动连接。
9.根据权利要求6所述的一种移动式步行训练机器人,其特征在于:所述第二安装座(8)包括第一安装板(23)、第二安装板(24)及第三安装板(25),所述第一安装板(23)和第二安装板(24)分别与第三安装板(25)连接;所述第一安装板(23)、第二安装板(24)和第三安装板(25)两两垂直设置;所述第一安装板(23)与滑动块(18)连接,所述第三安装板(25)分别与拉绳(13)和第一传感器(12)连接;所述第二安装板(24)与吊臂组件(2)连接。
10.根据权利要求1所述的一种移动式步行训练机器人,其特征在于:所述驱动机构(11)包括驱动组件及设置于驱动组件的输出端的推动杆(14),所述驱动组件的壳体依次贯穿第二安装座(8)和第一安装座(7)并分别与第二安装座(8)和第一安装座(7)滑动连接,所述推动杆(14)与推板(6)连接。
技术总结
本技术涉及医疗康复训练设备技术领域,尤其是指一种移动式步行训练机器人,其包括机架、吊臂组件、设置于机架内的动态减重装置、麦克纳姆轮装置及设置于机架上的扶手组件,所述动态减重装置包括推板、第一安装座、连接于吊臂组件的第二安装座、连接于机架的第三安装座、连接于推板和第一安装座的弹性结构、连接于第二安装座和第三安装座的拉绳、驱动机构及连接于第一安装座和第二安装座的第一传感器,所述驱动机构的输出端与推板连接。动态减重装置的结构简单、紧凑;动态减重装置装设于机架内,减少了机架体积,移动式步态训练机器人的移动和通行方便;第一传感器实时监测弹性结构的拉力的数值,便于医院人员对减重力的进行观测、记录及调节。
技术研发人员:王俊锋,沈博,吕雪宁,秦兴东
受保护的技术使用者:广东智爱机器人科技有限公司
技术研发日:20230117
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!