一种机械臂升降用助力平衡装置的制作方法
本技术涉及微创手术机器人,具体而言,涉及一种机械臂升降用助力平衡装置。
背景技术:
1、参考申请公布号为cn109091237a、名称为微创手术器械辅助系统的中国发明专利申请,以腹腔镜为代表的微创外科被誉为20世纪医学科学对人类文明的重要贡献之一,微创手术操作是指医生利用细长的手术工具通过人体表面的微小切口探入到体内进行手术操作的。它与传统的开口手术相比具有手术切口小、出血量少、术后疤痕小、恢复时间快等优点,这使得病人遭受的痛苦大大减少;因此微创外科被广泛的应用于临床手术。
2、参考申请公布号为cn109091238a、名称为分体式微创手术器械辅助系统的中国发明专利申请,微创外科手术机器人系统包括医生操作台,外科医生通过操作医生机械臂来精准地控制患者操作台的器械机械臂上的一个或多个手术器械执行各种手术动作。
3、外科手术器械是外科手术操作的必备工具,其可以执行不同功能,包括夹持、切除、切割、缝合、吻合等。外科手术器械具有不同的配置,其包括执行末端,腕节、器械杆、器械盒等,外科手术器械被插入,穿过开口,以实施远程外科手术。
4、患者操作台上的器械机械臂包括被动臂、主动臂两部分,通过导向装置、丝杠锁紧结构固定于横梁悬吊臂上。机械臂整体升降用于术前机械臂穿刺器相对于患者体表手术切口位置一致性调整。需要手术护士现场来手动操作机械臂升降对准。对机械臂在手动升降行程中的重量平衡提出非常高的要求。重量平衡不到位,误差大,护士拉动费力,甚至拉不动,会延误手术准备时间。只有将机械臂重量精确稳定的平衡到位,才能实现人力轻松顺畅的助力升降调整。目前通常采用电动升降助力(参考专利号为201921439081.x的实用新型专利),成本高,控制复杂,结构占用空间大。此外也有采用气弹簧助力,会出现弹力不稳定,行程中弹力大小变化手动控制不了,同规格气弹簧弹力值偏差大小不一致等问题。目前都不适用于手术前对机器人机械臂的简单快速省力的调整需要。
技术实现思路
1、本实用新型就是为了解决现有微创手术机器人患者操作台上的机械臂,电动升降机构成本高,控制复杂,结构占用空间大,行程不稳定的技术问题,提供了一种成本低,助力效果好的机械臂升降用助力平衡装置。
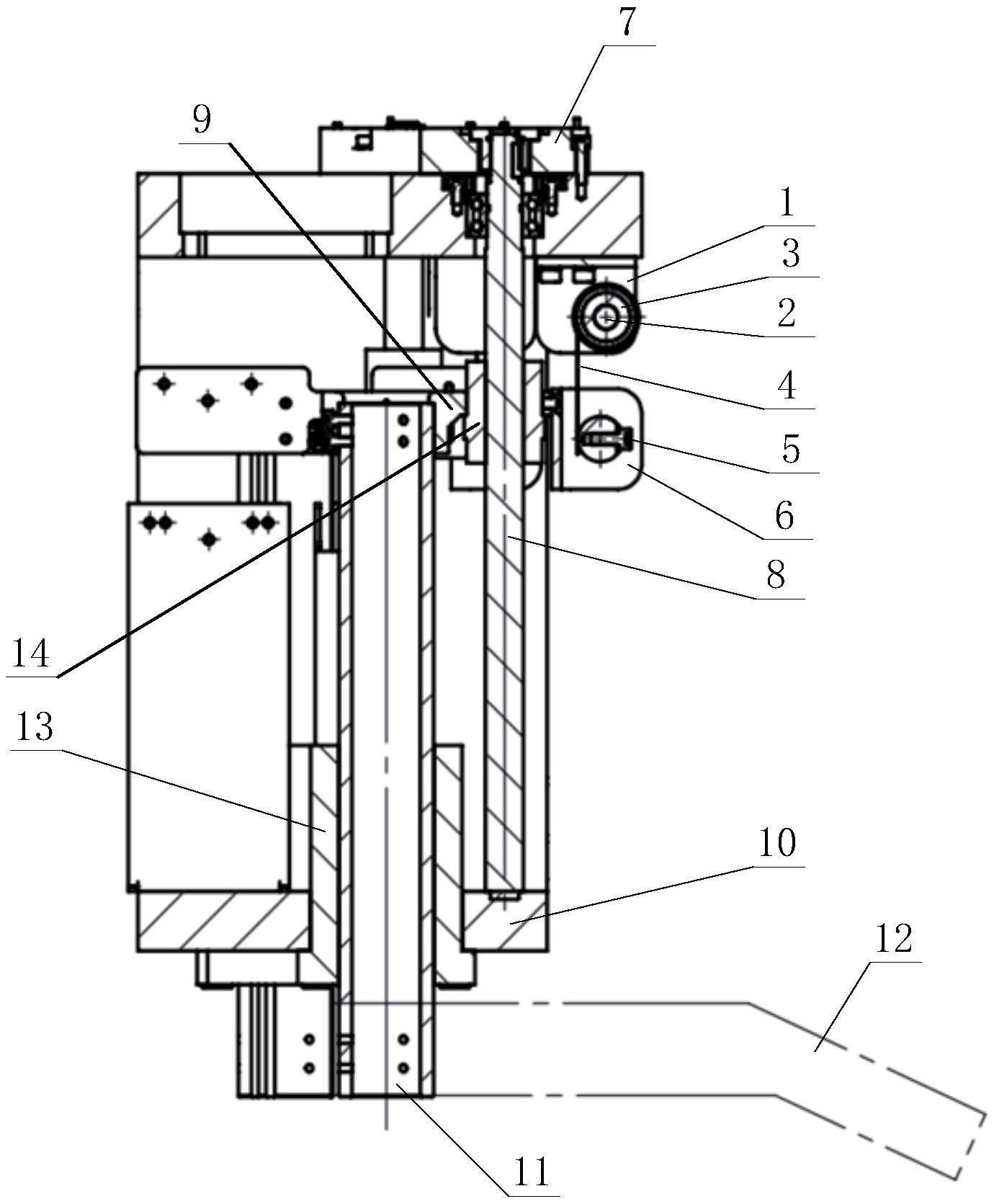
2、本发明提供一种机械臂升降用助力平衡装置,包括机械臂支架、花键套、花键轴、上轴承座、滚珠丝杠、螺母座、轴套、弹簧支架、弹簧支座、固定轴和恒力弹簧,花键套与机械臂支架的下部固定连接,所述花键轴与花键套连接,上轴承座与机械臂支架的上部连接,滚珠丝杠的上端与上轴承座连接,滚珠丝杠的下端悬空,螺母座与滚珠丝杠连接,螺母座与花键轴的上端之间通过连接座连接,弹簧支座与连接座连接,弹簧支架与机械臂支架的上部固定连接,固定轴与弹簧支架固定连接,轴套套在固定轴上;恒力弹簧套在轴套上,恒力弹簧中心位置的内端固定在轴套的外圆上,恒力弹簧的自由端固定在弹簧支座上。
3、优选地,机械臂升降用助力平衡装置还包括抱闸,所述抱闸固定连接在机械臂支架的上部,所述滚珠丝杠的上端与抱闸连接。
4、本实用新型还提供一种机械臂升降用助力平衡装置,包括机械臂支架、花键套、花键轴、上轴承座、下轴承座、滚珠丝杠、螺母座、轴套、弹簧支架、弹簧支座、固定轴和恒力弹簧,花键套与机械臂支架的下部固定连接,花键轴与花键套连接,上轴承座与机械臂支架的上部连接,下轴承座与机械臂支架的下部连接,滚珠丝杠的上端与上轴承座连接,滚珠丝杠的下端与下轴承座连接,螺母座与滚珠丝杠连接,螺母座与花键轴的上端之间通过连接座连接,弹簧支座与连接座连接,弹簧支架与机械臂支架的上部固定连接,固定轴与弹簧支架固定连接,轴套套在固定轴上;恒力弹簧套在轴套上,恒力弹簧中心位置的内端固定在轴套的外圆上,恒力弹簧的自由端固定在弹簧支座上。
5、本实用新型的有益效果是,具有结构简单,使用方便、快速,成本低,易安装调试,助力效果好,结构占用空间小等特点。应用在机器人机械臂升降助力上,能够快速准确地将机械臂及穿刺器位置调整到位,极大减轻了医护人员的工作疲劳强度,节省了机器人术前准备时间,满足手术前对机械臂的简单快速省力的调整需要。
6、本实用新型进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
技术特征:
1.一种机械臂升降用助力平衡装置,其特征在于,包括机械臂支架、花键套、花键轴、上轴承座、滚珠丝杠、螺母座、轴套、弹簧支架、弹簧支座、固定轴和恒力弹簧,所述花键套与机械臂支架的下部固定连接,所述花键轴与花键套连接,所述上轴承座与机械臂支架的上部连接,所述滚珠丝杠的上端与上轴承座连接,所述滚珠丝杠的下端悬空,所述螺母座与滚珠丝杠连接,所述螺母座与花键轴的上端之间通过连接座连接,所述弹簧支座与连接座连接,所述弹簧支架与机械臂支架的上部固定连接,所述固定轴与弹簧支架固定连接,所述轴套套在固定轴上;所述恒力弹簧套在轴套上,恒力弹簧中心位置的内端固定在轴套的外圆上,恒力弹簧的自由端固定在弹簧支座上。
2.根据权利要求1所述的机械臂升降用助力平衡装置,其特征在于,所述机械臂升降用助力平衡装置还包括抱闸,所述抱闸固定连接在机械臂支架的上部,所述滚珠丝杠的上端与抱闸连接。
3.一种机械臂升降用助力平衡装置,其特征在于,包括机械臂支架、花键套、花键轴、上轴承座、下轴承座、滚珠丝杠、螺母座、轴套、弹簧支架、弹簧支座、固定轴和恒力弹簧,所述花键套与机械臂支架的下部固定连接,所述花键轴与花键套连接,所述上轴承座与机械臂支架的上部连接,所述下轴承座与机械臂支架的下部连接,所述滚珠丝杠的上端与上轴承座连接,所述滚珠丝杠的下端与下轴承座连接,所述螺母座与滚珠丝杠连接,所述螺母座与花键轴的上端之间通过连接座连接,所述弹簧支座与连接座连接,所述弹簧支架与机械臂支架的上部固定连接,所述固定轴与弹簧支架固定连接,所述轴套套在固定轴上;所述恒力弹簧套在轴套上,恒力弹簧中心位置的内端固定在轴套的外圆上,恒力弹簧的自由端固定在弹簧支座上。
技术总结
本技术涉及一种机械臂升降用助力平衡装置,其解决了现有微创手术机器人患者操作台上的机械臂,电动升降机构成本高,控制复杂,结构占用空间大,行程不稳定的技术问题,其包括机械臂支架、花键套、花键轴、上轴承座、滚珠丝杠、螺母座、轴套、弹簧支架、弹簧支座、固定轴和恒力弹簧。本技术利用恒力弹簧特性来做机器人机械臂的重量平衡,手动升降就可以轻拉机械臂打破其重量平衡来实现机械臂快速升降及任意位置停靠,达到最佳助力的效果。
技术研发人员:王炳强,江万里,孙之建
受保护的技术使用者:山东威高手术机器人有限公司
技术研发日:20230207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!