一种用于医疗机器人的力控把手的制作方法
本技术属于医疗机器设备,具体涉及一种用于医疗机器人的力控把手。
背景技术:
1、随着力控技术的发展,力控技术精度可达微米级,医疗领域已经开始使用力控机器人,但是在医疗设备安全方面,还不能引起重视,如何更好地提升手术操作的精确度、安全性和灵活度是如今需要解决的问题。基于上述的实际技术需求,现出现了带有安全开关的把手,如申请号为202210205493.7的中国发明专利申请《含有安全开关的机器人控制手柄及方法》,其目的在于解决操作安全性的问题。但由于受到其安全开关位置的限制,把手握法单一,对手部姿势较为限制,长时间操作会导致舒适度较差,从而降低操作的准确性,操作的灵活度和精确度也没有办法保证,因此还需要进一步改进。
技术实现思路
1、本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种用于医疗机器人的力控把手,通过围设在把手本体外侧壁上的薄膜压力传感器检测人手握信号,从而控制医疗机器人使能,保证机器人的使用可控性和安全性,同时该种薄膜压力传感器的布设方式能够适应不同的把手握持方式,从而避免长期操作下的手部僵持,再结合把手回正机构能够使把手的操作更加精准、灵活。
2、为解决上述技术问题,本实用新型采用的技术方案是:一种用于医疗机器人的力控把手,其特征在于:包括底座、设施在底座上的六维力传感器、设置在六维力传感器上的把手本体、设置在把手本体外侧壁上的手感应开关和设置在把手本体内的把手回正机构,把手本体底部与六维力传感器的环形测力平台连接;
3、所述手感应开关包括至少三个围设在把手本体外侧壁上的薄膜压力传感器;所述把手本体为中空结构,所述把手回正机构包括支撑在把手本体顶部内侧与底座之间的弹性尼龙杆和反力支撑杆,反力支撑杆顶部固定设置有柱形安装帽,把手本体顶部内壁上设置有用于卡设柱形安装帽的安装座,弹性尼龙杆的顶部卡设在柱形安装帽内壁与反力支撑杆之间;反力支撑杆底部套设有弹簧,反力支撑杆上设置有用于安装弹簧的台阶结构,弹簧的底部不低于反力支撑杆底部,弹性尼龙杆和弹簧的底部均通过所述环形测力平台的中部通孔抵接在底座上。
4、上述的一种用于医疗机器人的力控把手,其特征在于:所述把手本体外侧壁上缠设有用于保护多个薄膜压力传感器的柔性保护层。
5、上述的一种用于医疗机器人的力控把手,其特征在于:所述薄膜压力传感器的感应表面上还设置有柔性垫片,所述柔性垫位于薄膜压力传感器与柔性保护层之间。
6、本实用新型与现有技术相比的优点为:本实用新型通过围设在把手本体外侧壁上的薄膜压力传感器检测人手握信号,从而控制医疗机器人使能,保证机器人的使用可控性和安全性,同时该种薄膜压力传感器的布设方式能够适应不同的把手握持方式,从而避免长期操作下的手部僵持,再结合把手回正机构能够使把手的操作更加精准、灵活。
7、下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
技术特征:
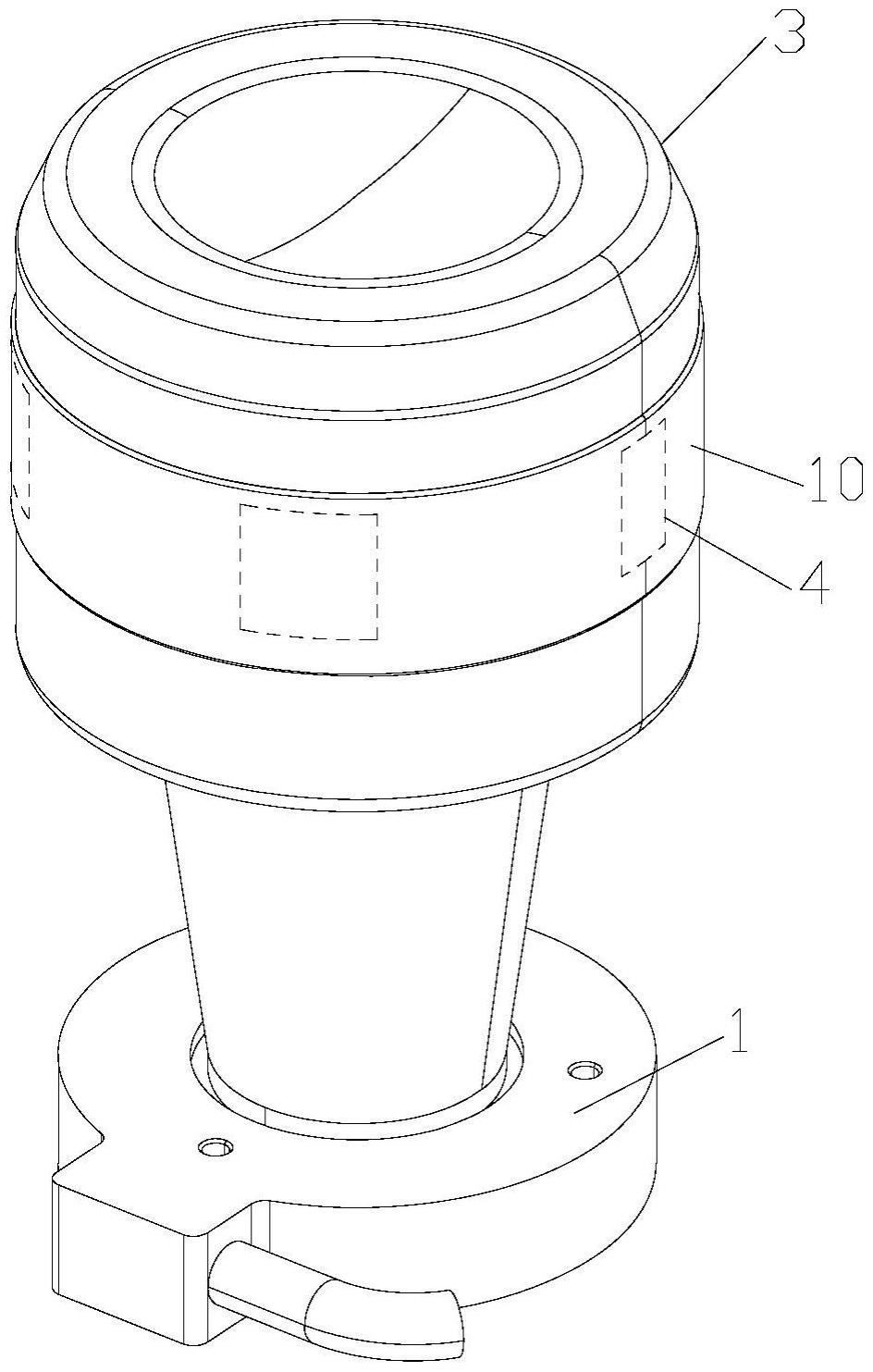
1.一种用于医疗机器人的力控把手,其特征在于:包括底座(1)、设施在底座(1)上的六维力传感器(2)、设置在六维力传感器(2)上的把手本体(3)、设置在把手本体(3)外侧壁上的手感应开关和设置在把手本体(3)内的把手回正机构,把手本体(3)底部与六维力传感器(2)的环形测力平台连接;
2.根据权利要求1所述的一种用于医疗机器人的力控把手,其特征在于:所述把手本体(3)外侧壁上缠设有用于保护多个薄膜压力传感器(4)的柔性保护层(10)。
3.根据权利要求2所述的一种用于医疗机器人的力控把手,其特征在于:所述薄膜压力传感器(4)的感应表面上还设置有柔性垫片,所述柔性垫位于薄膜压力传感器(4)与柔性保护层(10)之间。
技术总结
本技术公开了一种用于医疗机器人的力控把手,包括底座、设施在底座上的六维力传感器、设置在六维力传感器上的把手本体、设置在把手本体外侧壁上的手感应开关和设置在把手本体内的把手回正机构,把手本体底部与六维力传感器的环形测力平台连接;手感应开关包括至少三个围设在把手本体外侧壁上的薄膜压力传感器;把手回正机构包括支撑在把手本体顶部内侧与底座之间的弹性尼龙杆和反力支撑杆。本技术通过围设的薄膜压力传感器控制医疗机器人使能,保证机器人的使用可控性和安全性,同时该种传感器布设方式能够适应不同的把手握持方式,从而避免长期操作下的手部僵持,再结合把手回正机构能够使把手的操作更加精准、灵活。
技术研发人员:李彦飞,王刚,张金艳,王华欣,胡锟,王康
受保护的技术使用者:陕西华明普泰医疗设备有限公司
技术研发日:20230227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!