一种手术操作器的导向装置及手术机械臂的制作方法
本技术涉及手术臂领域,尤其涉及一种手术操作器的导向装置及手术机械臂。
背景技术:
1、在手术机械臂应用过程中,对应的操作器,例如标定架、空间标记板、穿刺器、磨钻器等需要固定在机械臂末端进行移动,现有的操作器需要通过末端执行器固定在机械臂末端,且针对每一种操作器,需要配置对应的末端执行器,这样当机械臂末端需要更换操作器时,就需要连通末端执行器一起进行更换。
2、因此,现有的末端执行器只能适配一种操作器,普适性不强,造成手术设备装配拆卸繁琐,影响器械装配的效率。同时,现有的末端执行器无法对操作器的作用力进行感知,无法辅助医生感知操作器手术过程中作用力的大小。
技术实现思路
1、本实用新型旨在至少在一定程度上解决相关技术中的问题之一。为此,本实用新型的目的在于提供一种手术操作器的导向装置及手术机械臂,能够适用不同种类的操作器,显著提升了器械装配效率。
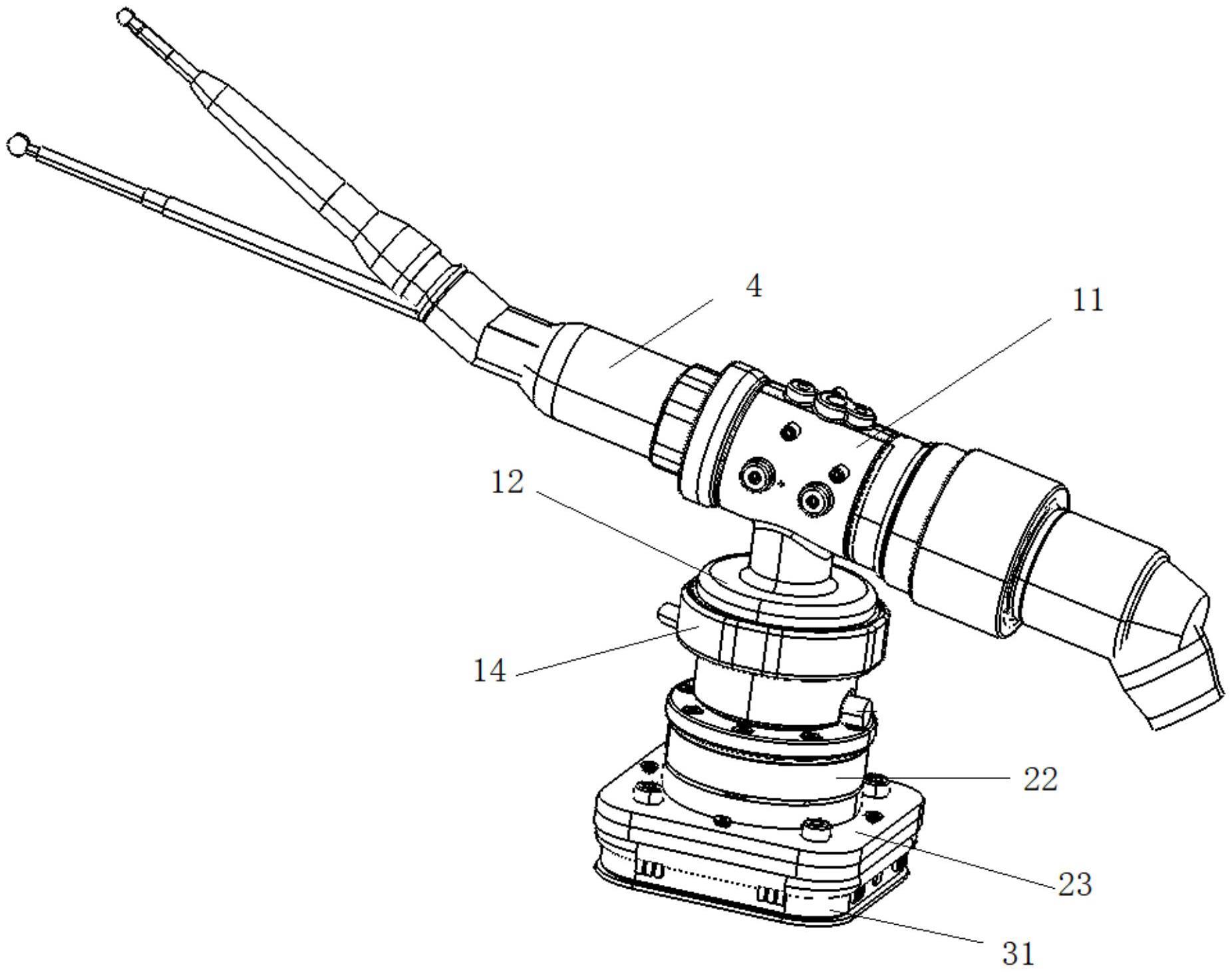
2、为了实现上述目的,本申请采用如下技术方案:一种手术操作器的导向装置,包括导向器、定位紧固件和支撑组件;
3、所述导向器包括导向筒和连接架;所述导向筒为中空结构,所述操作器穿过所述导向筒,所述定位紧固件的一端可拆卸连接所述连接架;所述定位紧固件的另一端固定在所述支撑组件的顶面,所述支撑组件连接机械臂末端。
4、进一步地,所述定位紧固件包括导向锁紧块和导向固定块,所述导向固定块卡接在所述连接架的内侧,所述导向锁紧块卡接在所述连接架的外侧。
5、进一步地,所述导向固定块的外侧设置有定位板,所述导向固定块的外侧、导向锁紧块的内侧壁、以及定位板围成容纳连接架的腔室。
6、进一步地,所述连接架的内侧壁设置有筋条,所述导向固定块的外侧壁设置有与所述筋条相适配的卡接槽。
7、进一步地,所述支撑组件包括垫板和底板,所述垫板固定在底板顶面,所述导向固定块固定在垫板的顶面。
8、进一步地,所述导向固定块包括圆形端面以及环绕在圆形端面外侧且朝向支撑组件延伸的侧壁,所述垫板的顶面和所述导向固定块的圆形端面形成同心圆。
9、进一步地,所述底板包括连接板和支撑座,所述垫板固定在所述支撑座的顶面,所述支撑座固定在所述连接板中。
10、进一步地,所述连接板和所述支撑座板均为圆柱状结构,所述连接板的边缘设置有定位孔。
11、进一步地,所述导向筒为中空的圆柱状结构,所述导向筒的侧壁设置有定位槽,所述导向筒的端部外侧设置有卡接螺纹,所述导向筒的侧壁设置有螺孔。一种手术机械臂,包括如上所述的手术操作器的导向装置,还包括穿过所述导向筒的操作器。
12、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请末端执行器包括导向器、定位紧固块和支撑组件,其中,支撑组件固定在机械臂末端,定位紧固件的一端可拆卸连接所述连接架;定位紧固件的另一端固定在支撑组件的顶面,使得导向器和定位紧固块形成一个整体;同时导向筒为中空结构,当需要更换操作器的时候,只需要将操作器从导向筒中抽出,并更换下一个操作器即可;本申请中末端执行器可以兼容所有圆柱状以及类似结构的操作器,只需要将操作器插入至导向筒中即可,同时,导向器可拆卸固定在定位紧固块中,不同导向器中导向筒的尺寸、长度和倾斜角度不同,通过导向器的更换,进一步增大了末端执行器的适用范围,显著提升了器械装配效率。
技术特征:
1.一种手术操作器的导向装置,其特征在于,包括导向器、定位紧固件和支撑组件;
2.根据权利要求1所述的一种手术操作器的导向装置,其特征在于,所述定位紧固件包括导向锁紧块和导向固定块,所述导向固定块卡接在所述连接架的内侧,所述导向锁紧块卡接在所述连接架的外侧。
3.根据权利要求2所述的一种手术操作器的导向装置,其特征在于,所述导向固定块的外侧设置有定位板,所述导向固定块的外侧、导向锁紧块的内侧壁、以及定位板围成容纳连接架的腔室。
4.根据权利要求3所述的一种手术操作器的导向装置,其特征在于,所述连接架的内侧壁设置有筋条,所述导向固定块的外侧壁设置有与所述筋条相适配的卡接槽。
5.根据权利要求2所述的一种手术操作器的导向装置,其特征在于,所述支撑组件包括垫板和底板,所述垫板固定在底板顶面,所述导向固定块固定在垫板的顶面。
6.根据权利要求5所述的一种手术操作器的导向装置,其特征在于,所述导向固定块包括圆形端面以及环绕在圆形端面外侧且朝向支撑组件延伸的侧壁,所述垫板的顶面和所述导向固定块的圆形端面形成同心圆。
7.根据权利要求6所述的一种手术操作器的导向装置,其特征在于,所述底板包括连接板和支撑座,所述垫板固定在所述支撑座的顶面,所述支撑座固定在所述连接板中。
8.根据权利要求7所述的一种手术操作器的导向装置,其特征在于,所述连接板和所述支撑座板均为圆柱状结构,所述连接板的边缘设置有定位孔。
9.根据权利要求1所述的一种手术操作器的导向装置,其特征在于,所述导向筒为中空的圆柱状结构,所述导向筒的侧壁设置有定位槽,所述导向筒的端部外侧设置有卡接螺纹,所述导向筒的侧壁设置有螺孔。
10.一种手术机械臂,包括权利要求1-9任意一项所述的手术操作器的导向装置,还包括穿过所述导向筒的操作器。
技术总结
本技术公开了手术操作器的导向装置,包括导向器、定位紧固件和支撑组件;所述导向器包括导向筒和连接架;所述导向筒为中空结构,所述操作器穿过所述导向筒,所述定位紧固件的一端可拆卸连接所述连接架;所述定位紧固件的另一端固定在所述支撑组件的顶面,所述支撑组件连接机械臂末端。本发明提供的一种手术操作器的导向装置及手术机械臂,能够适用不同种类的操作器,显著提升了器械装配效率。
技术研发人员:邵明昊,魏愷含,张荣锋,吕飞舟,唐文彬,林健,诸葛晓钟,唐雨辰,朱志军
受保护的技术使用者:上海极睿医疗科技有限公司
技术研发日:20230307
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!