一种多自由度施力装置及设备的制作方法
本申请涉及医疗器械,尤其涉及一种多自由度施力装置及设备。
背景技术:
1、脊柱侧凸/脊柱侧弯是指脊柱的一个或数个节段侧方弯曲,或伴有椎体旋转的脊柱三维畸形,包括冠状面、矢状面和水平面上的序列异常。正常人的脊柱从后面看应该是一条直线,并且躯干两侧对称。轻度的脊柱侧凸通常没有明显的不适,外观上也看不到明显的躯体畸形。较重的脊柱侧凸则会影响婴幼儿或青少年的生长发育,使身体变形,严重者可以影响心肺功能、甚至累及脊髓,造成瘫痪。轻度的脊柱侧凸可以观察,严重者则需要手术治疗。
2、脊柱侧凸是常发于青少年群体,国际上有2%~3%的发病率。在中国,脊柱侧凸的发病率高达5%。临床上常用cobb角来衡量脊柱侧凸的严重程度,当脊柱侧凸在一定的严重程度时(cobb角大于20度,且小于40度),宜采用保守治疗,常用一定装置对脊柱侧凸患者躯干不同部位施加矫正推力及旋转推力,使脊柱侧凸处因受力而缓解侧凸程度并维持一定时间,使用持续推力或间歇推力,均能起到一定的治疗效果。
3、目前的矫正装置方案中,基本都是利用各种传动机构对脊柱侧凸患者躯干的不同部位施加持续或间歇性的力,从而达到矫正脊柱的效果,其中对患者躯干施加矫正力推力的机构主要有矫正带、气缸、气囊、电动推杆、手动螺杆、伸缩杆、加压摇杆、矫正机械手等,这些装置按施力类型可分为:气动、电动、手动,其中气动主要采用气囊或气缸等机构施加矫正推力,电动主要采用电动推杆等机构施加矫正推力,手动主要采用手动螺杆机构及拉紧器搭配矫正带等机构施加矫正推力,在这些装置中,对患者所施加治疗力的作用点、方向及大小的调节主要以手动为主,部分可实现电动调节。诸如专利号为cn112168452a的中国专利公开的一种脊柱侧凸三维推力矫正装置及其应用、专利号为cn215081530u的中国专利公开的一种脊柱侧弯治疗用辅助装置、专利号为cn114041910a的中国专利公开的一种人工智能型脊柱侧弯治疗仪及其使用方法、专利号为cn109172082a的中国专利公开的一种脊柱侧弯三维矫正训练架、专利号为cn113974937a的中国专利公开的一种脊柱侧弯矫正装置、专利号为cn213310693u的中国专利公开的一种辅助脊柱侧弯治疗的仪器、专利号为cn210990977u的中国专利公开的一种用于脊柱侧弯矫形的定点加压装置等。
4、现有的脊柱侧凸矫正装置中仍存在以下不足:1、对患者躯干施加治疗推力的装置遍存在智能化程度低、治疗前对施力点、施力方向及施力大小调节多为手动调节,对推力三要素(作用点、作用方向、力的大小)的调节精度不够,无法精准治疗,且调节步骤较多,效率较低,增大医生工作量;2、通过手动螺杆、电动螺杆对患者躯干所施加的治疗推力柔顺性较差,治疗时舒适性不够;3、通过机械臂直接对人体躯干施加治疗推力,存在安全性较差,在紧急情况下往往只能将机械臂掉电停止,而无法快速将患者安全释放出来。总的来说,兼顾自动化精细调节与患者安全保障的方案,是现存技术方案中不具备的。
技术实现思路
1、有鉴于此,本申请的目的是提供一种多自由度施力装置及设备,以解决背景技术中存在的技术问题。
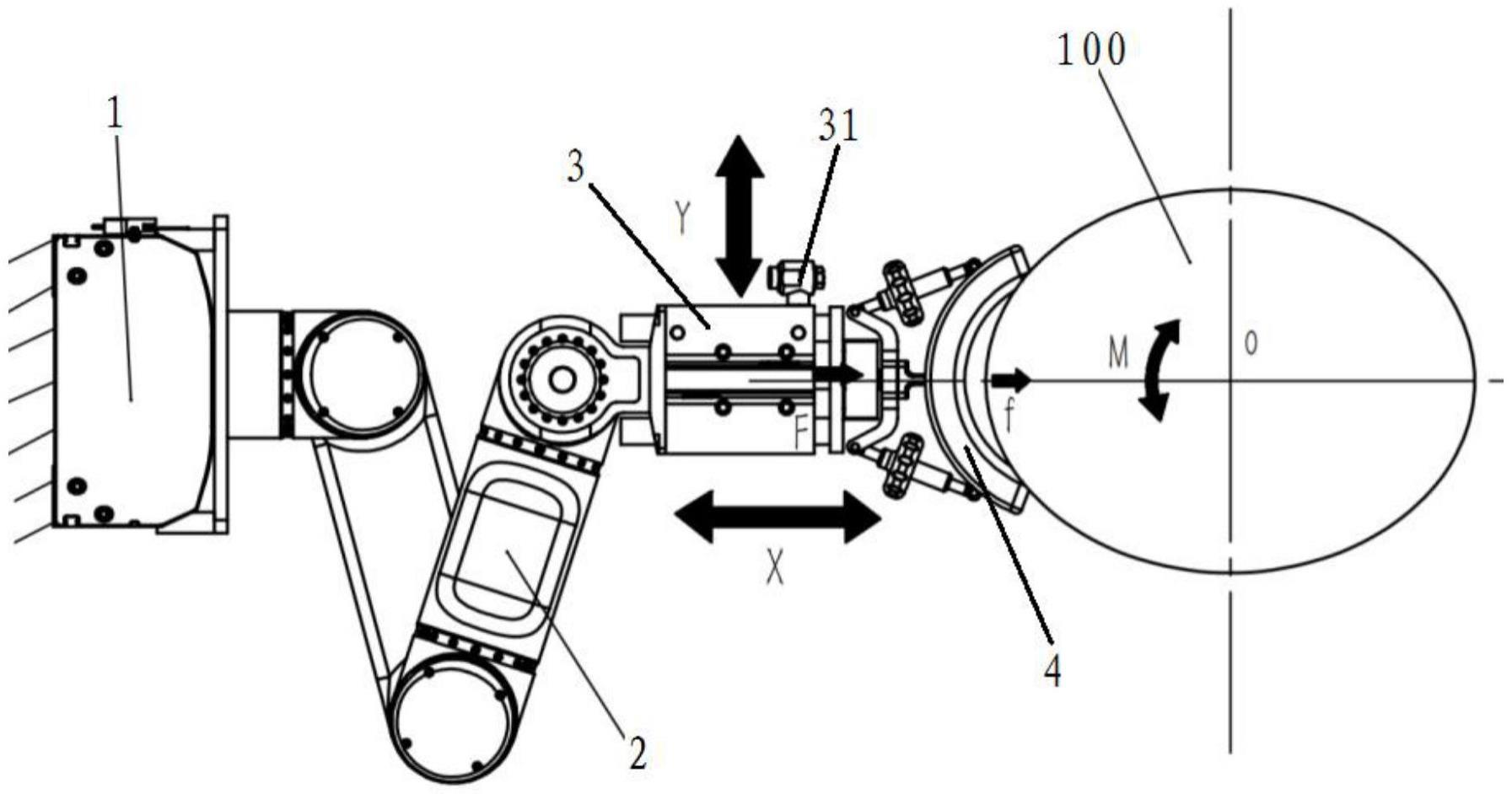
2、为达到上述技术目的,本申请提供了一种多自由度施力装置,包括多轴机械臂、气缸以及治疗头;
3、所述气缸的固定端与所述多轴机械臂的运动端连接,且所述气缸上设置有第一泄压阀;
4、所述治疗头与所述气缸的运动端连接。
5、进一步地,还包括基座;
6、所述多轴机械臂的固定端与所述基座连接。
7、进一步地,所述基座用于带动所述多轴机械臂沿预设运动路径运动。
8、进一步地,所述多轴机械臂至少包括两个连接臂以及至少两个驱动关节。
9、进一步地,所述第一泄压阀为自动泄压阀。
10、进一步地,所述气缸上还设置有第二泄压阀。
11、进一步地,所述第二泄压阀为手动泄压阀。
12、进一步地,所述治疗头上安装有力传感器;
13、所述气缸的运动端与所述力传感器连接。
14、进一步地,所述治疗头为刚体治疗头或振动治疗头。
15、本申请还公开了多自由度施力设备,包括一个或多个上述的多自由度施力装置。
16、从以上技术方案可以看出,本申请所设计的多自由度施力装置,采用多轴机械臂和气缸组合设计,通过多轴机械臂实现气缸精确到达空间任意治疗点位,再通过气缸带动治疗头对人体躯干施加治疗推力,这种组合设计大大提高了空间自由度和调节范围,可满足不同患者治疗时对施力点、施力方向调节的需求。再者,这一组合设计智能化程度高,对推力三要素(作用点、作用方向、力的大小)的调节都可通过电动控制,可实现全自动化,调节精度高,可实现精准治疗,而且每个患者的治疗参数也都可记录并存储于患者档案,可在患者下次治疗时调用并复现,不仅缩短了治疗前的准备时间,提高了治疗效率,也同时减轻了医生的工作量。再者,通过气缸对人体躯干施加治疗推力会比较柔和,具有缓冲性。再者,引入第一泄压阀可提供施力保护,提高使用安全性,确保患者的安全。同时,在紧急情况下,可以通过掉电等方式让机械臂停止运动,并通过第二泄压阀手动泄压后,快速释放患者,进一步保障患者安全。
技术特征:
1.一种多自由度施力装置,其特征在于,包括多轴机械臂(2)、气缸(3)以及治疗头(4);
2.根据权利要求1所述的多自由度施力装置,其特征在于,还包括基座(1);
3.根据权利要求2所述的多自由度施力装置,其特征在于,所述基座(1)用于带动所述多轴机械臂(2)沿预设运动路径运动。
4.根据权利要求1所述的多自由度施力装置,其特征在于,所述多轴机械臂(2)至少包括两个连接臂以及至少两个驱动关节。
5.根据权利要求1所述的多自由度施力装置,其特征在于,所述第一泄压阀(31)为自动泄压阀。
6.根据权利要求1所述的多自由度施力装置,其特征在于,所述气缸(3)上还设置有第二泄压阀。
7.根据权利要求6所述的多自由度施力装置,其特征在于,所述第二泄压阀为手动泄压阀。
8.根据权利要求1所述的多自由度施力装置,其特征在于,所述治疗头(4)上安装有力传感器(5);
9.根据权利要求8所述的多自由度施力装置,其特征在于,所述治疗头(4)为刚体治疗头或振动治疗头。
10.多自由度施力设备,其特征在于,包括一个或多个如权利要求1至9任意一项所述的多自由度施力装置。
技术总结
本申请公开了一种多自由度施力装置及设备,涉及医疗器械技术领域,其中装置采用多轴机械臂和气缸组合设计,通过多轴机械臂实现气缸精确到达空间任意治疗点位,再通过气缸带动治疗头对人体躯干施加治疗推力,可满足不同患者治疗时对施力点、施力方向调节的需求。再者,这一组合设计智能化程度高,调节精度高,可实现精准治疗,而且每个患者的治疗参数也都可记录并存储于患者档案,可在患者下次治疗时调用并复现,不仅缩短了治疗前的准备时间,提高了治疗效率,也同时减轻了医生的工作量。再者,通过气缸对人体躯干施加治疗推力会比较柔和,具有缓冲性。再者,引入第一泄压阀可提供施力保护,提高使用安全性,确保患者的安全。
技术研发人员:王帮德,李金华,李巍,程友顺,殷超云,蓝培钦
受保护的技术使用者:武汉科莱瑞迪医疗科技有限公司
技术研发日:20230315
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!