腔镜手术机器人的制作方法
本技术涉及医疗器械,具体地,涉及一种腔镜手术机器人。
背景技术:
1、在传统手术中,存在着视野不清晰且无立体感、站立耗费体力、器械不灵活等问题。机器人辅助手术具有灵活精准、抗疲劳、视野大且清晰、过滤震颤、创口小恢复快、出血少并发症少、直觉自然和易于学习等优势,因此在高难度手术中具备必要性。
2、目前传统的腔镜手术机器人多为多臂结构,内窥镜与多个手术器械分别安装在单独的控制臂上,单台手术机器人一般设计有三到四个控制臂来满足手术要求,同时单一手术器械大部分为3至4个自由度的设计,在实际应用中多个控制臂在工作过程中容易产生相互干涉,且4个自由度的器械在使用中存在一定的局限性无法完成部分的手术操作,另外多个手术器械需要通过多个开口进入患者体内进行手术操作,增加了患者的手术风险和创口数量,对患者来说影响很大。
技术实现思路
1、(一)要解决的技术问题
2、针对上述问题,本实用新型提供了一种腔镜手术机器人,通过在单臂结构的基础上设计手术器械和内窥镜,避免了多臂结构之间出现碰撞及干涉的现象,使得该腔镜手术机器人可以通过一个创口进入患者体内进行手术操作,大大减少了手术风险和患者的创口数量。
3、(二)技术方案
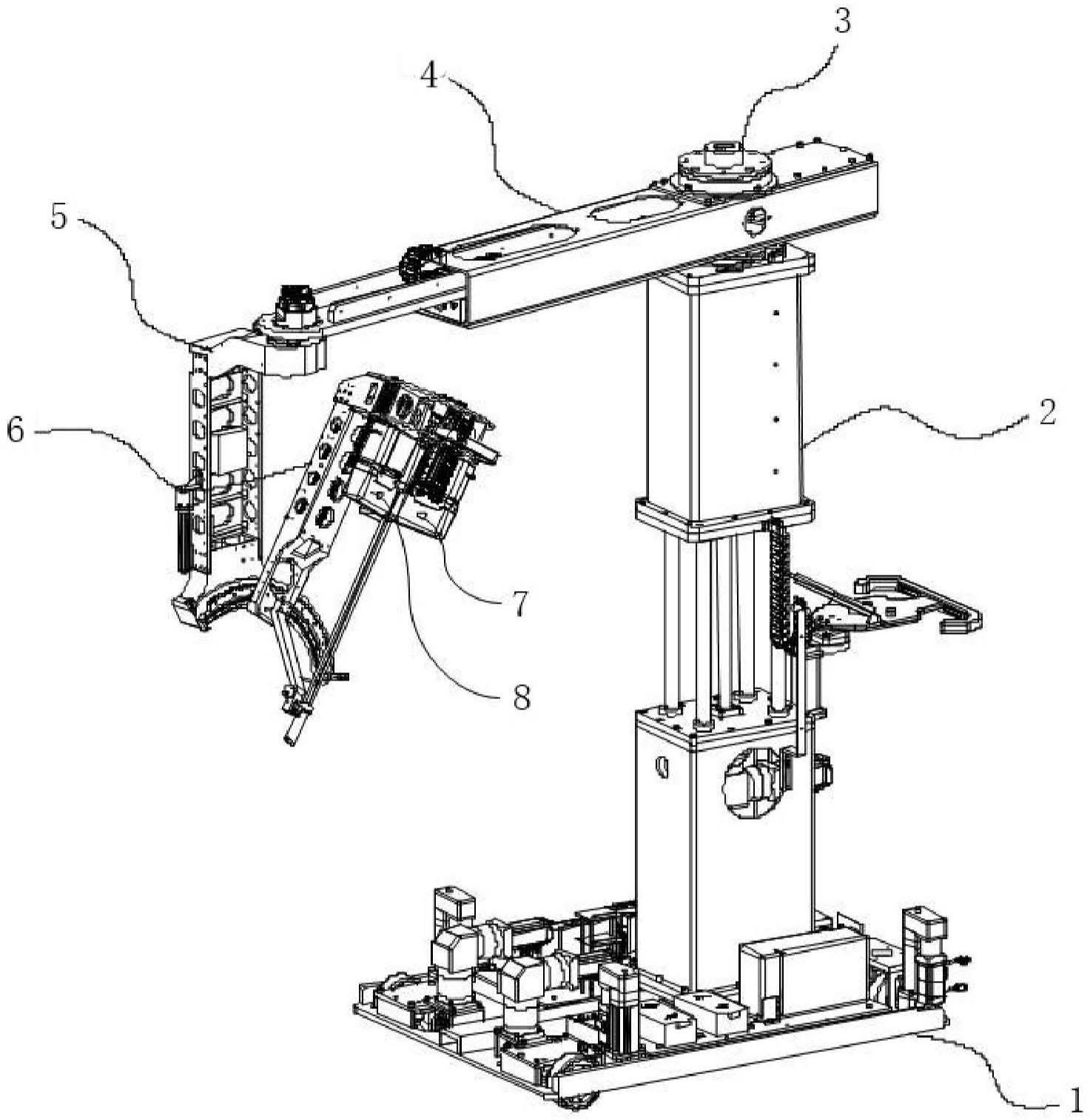
4、本实用新型实施例一个方面提供了一种腔镜手术机器人,包括台车;升降轴,安装于台车上,升降轴能够沿轴向做伸缩运动;旋转轴,固定于升降轴上;伸缩轴,套设于旋转轴上,伸缩轴能够沿轴向做伸缩运动;伸缩轴能够沿旋转轴旋转;控制臂,安装于伸缩轴上,控制臂包括偏摆臂和俯仰臂,其中:偏摆臂包括偏摆电机和偏摆座;偏摆电机和偏摆座固定连接;偏摆座的一端套设于伸缩轴一端,偏摆座在偏摆电机的驱动下能够绕着偏摆电机的轴线方向旋转;偏摆座与伸缩轴远离的一端设置为圆弧结构,圆弧结构上设有弧形导轨和第一弧形齿条;俯仰臂包括俯仰电机和俯仰座;俯仰电机和俯仰座固定连接;俯仰座固定安装于弧形导轨上,并与第一弧形齿条啮合,俯仰座在俯仰电机的驱动下能够沿着弧形导轨运动;俯仰座一端设有进退轨道,进退轨道能够沿轴向做进退运动;俯仰座与进退轨道远离的一端设有戳卡臂,戳卡臂上安装有戳卡;手术器械,安装于进退轨道上,进退轨道驱动手术器械运动;内窥镜,安装于进退轨道上,进退轨道驱动内窥镜运动。
5、在本实用新型一实施例中,升降轴包括第一电机组件;第一丝杆组件,与第一电机组件连接;第一滑轨组件,套设于第一丝杆组件上;第一丝杆组件在第一电机组件的驱动下能够沿第一滑轨组件运动;升降架,与第一滑轨组件固定连接。
6、在本实用新型一实施例中,伸缩轴包括第二电机组件;第二丝杆组件,与第二电机组件连接;第二滑轨组件,套设于第二丝杆组件上,第二丝杆组件在第二电机组件的驱动下能够沿第二滑轨组件运动;伸缩板,与第二滑轨组件固定连接;伸缩板上设有连接板,连接板与第二丝杆组件固定连接。
7、在本实用新型一实施例中,旋转轴包括:底座;主轴,安装于底座上;轴承组件,套设于主轴一端,轴承组件设有第二弧形齿条;主动轮,与第二弧形齿条啮合;第三电机组件,与主动轮连接;横梁,套设于主轴上,在第三电机组件的驱动下横梁能够沿主轴旋转;抱闸,套设于主轴另一端。
8、在本实用新型一实施例中,手术器械包括:器械驱动盒,安装于进退轨道上;器械末端,安装于器械驱动盒上,器械驱动盒驱动器械末端运动。
9、在本实用新型一实施例中,内窥镜包括:镜头驱动盒,安装于进退轨道上;成像组件,安装于镜头驱动盒上,镜头驱动盒驱动成像组件运动。
10、在本实用新型一实施例中,台车包括:车架;立柱,固定安装于车架上,与升降轴连接;控制系统,设于车架上;第四电机组件,与控制系统连接;动力轮,安装于车架上,与第四电机组件连接,第四电机组件驱动动力轮运动;万向轮组件,安装于车架上,与动力轮连接;电缸组件,安装于车架上,与控制系统连接。
11、在本实用新型一实施例中,进退轨道为2~5个。
12、在本实用新型一实施例中,手术器械有1~3个。
13、在本实用新型一实施例中,内窥镜有1~2个。
14、(三)有益效果
15、本实用新型实施例提供的一种腔镜手术机器人,至少具有以下有益效果:
16、(1)本实用新型实施例提供的腔镜手术机器人通过在单臂结构的基础上设计手术器械和内窥镜,避免了多臂结构之间出现碰撞及干涉的现象,使得该腔镜手术机器人可以通过一个创口进入患者体内进行手术操作,大大减少了手术风险和患者的创口数量。
17、(2)本实用新型实施例提供的腔镜手术机器人的手术器械具备8个自由度,多自由度的设计能使该手术器械更加灵活的完成手术操作。
技术特征:
1.一种腔镜手术机器人,其特征在于,包括:
2.根据权利要求1所述的腔镜手术机器人,其特征在于,所述升降轴包括:
3.根据权利要求1所述的腔镜手术机器人,其特征在于,所述伸缩轴包括:
4.根据权利要求1所述的腔镜手术机器人,其特征在于,所述旋转轴包括:
5.根据权利要求1所述的腔镜手术机器人,其特征在于,所述手术器械包括:
6.根据权利要求1所述的腔镜手术机器人,其特征在于,所述内窥镜包括:
7.根据权利要求1所述的腔镜手术机器人,其特征在于,所述台车包括:
8.根据权利要求1所述的腔镜手术机器人,其特征在于,所述进退轨道为2~5个。
9.根据权利要求1所述的腔镜手术机器人,其特征在于,所述手术器械有1~3个。
10.根据权利要求1所述的腔镜手术机器人,其特征在于,所述内窥镜有1~2个。
技术总结
本技术提供了一种腔镜手术机器人,涉及医疗器械技术领域。该腔镜手术机器人包括台车;升降轴,安装于台车上,升降轴能够沿轴向做伸缩运动;旋转轴,固定于升降轴上;伸缩轴,套设于旋转轴上,伸缩轴能够沿轴向做伸缩运动;伸缩轴能够沿旋转轴旋转;控制臂,安装于伸缩轴上,包括偏摆臂和俯仰臂;手术器械,安装于进退轨道上,进退轨道驱动手术器械运动;内窥镜,安装于进退轨道上,进退轨道驱动内窥镜运动。该腔镜手术机器人通过在单臂结构的基础上设计手术器械和内窥镜,避免了多臂结构之间出现碰撞及干涉的现象,使得该腔镜手术机器人可以通过一个创口进入患者体内进行手术操作,大大减少了手术风险和患者的创口数量。
技术研发人员:荀小杰,杜荣博,高德中,李志江,高连胜
受保护的技术使用者:杭州华匠医学机器人有限公司
技术研发日:20230309
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!