超声辅助机器人的制作方法
本发明涉及超声检查领域,具体是一种超声辅助机器人。
背景技术:
1、超声耦合剂能减少探头与人体皮肤之间的声阻差以及减轻其间的摩擦阻力,是超声检查中必要的医用耗材。为便于耦合剂的持握和挤出,现有的耦合剂往往装入柔性容器中。医护人员做超声检查时需一手持超声探头,一手持握和挤出耦合剂,同时还需对患者躯体进行涂抹,导致操作不便。且随着容器内剩余耦合剂量的减少,手动挤压的难度增加,瓶内可能还存在剩余量无法挤出的情况。此外,现有的耦合剂辅助挤压设备多为机械直接挤出,容易造成耦合剂滴落。
技术实现思路
1、有鉴于此,本实用新型旨在提供一种可以缓解上述问题或至少在一定程度上缓解上述问题的超声辅助机器人。
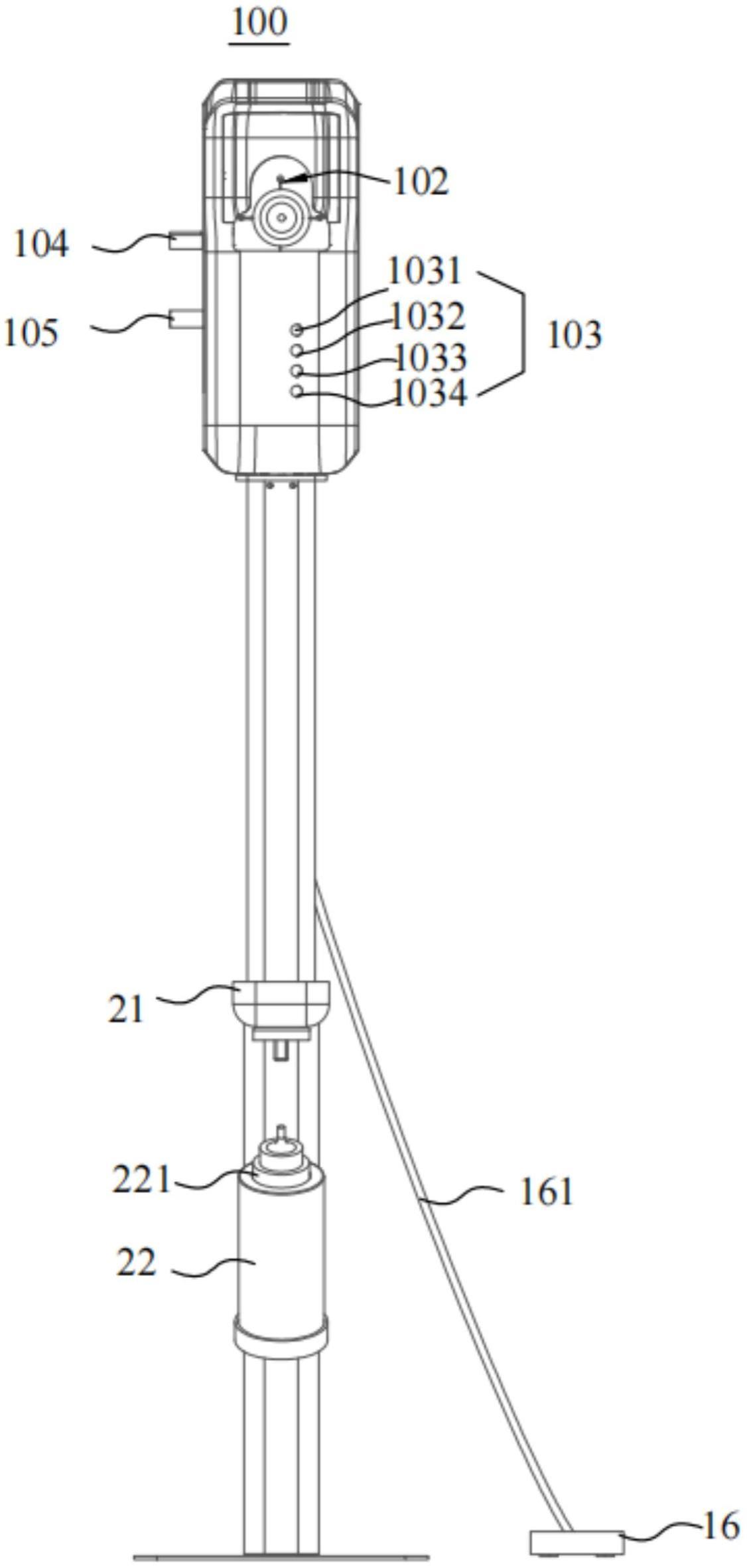
2、为了实现上述目的,本实用新型采用的技术方案是一种超声辅助机器人,包括:壳体,所述壳体内限定一收容腔,所述壳体具有贯穿其一侧壁并与所述收容腔连通的开口,所述壳体上还设有控制开关;固定压板,固定设置于所述壳体内;多个支杆,固定连接于所述固定压板的底端;活动压板,设于所述固定压板的下方,与所述固定压板相对且间隔设置并于其间形成用于容纳一容器的容置空间,所述活动压板上对应所述多个支杆设置有多个穿孔,所述多个支杆分别穿过所述多个穿孔并与所述穿孔间隔配合;驱动组件,设于所述壳体内,并与所述活动压板连接,用于驱动所述活动压板沿所述支杆相对所述固定压板运动,从而相对靠近或远离所述固定压板;控制主板,分别与所述控制开关和所述驱动组件电连接;支架,与所述壳体固定连接;以及踏板,与所述控制主板电连接;其中,所述容器具有一开口端,当所述容器位于所述容置空间时,所述开口端从所述壳体的开口伸出所述壳体外;踏动所述踏板时,所述驱动组件可驱动所述活动压板靠近所述固定压板并挤压所述容置使得容器内的流体从所述开口处流出;松开所述踏板后,所述活动压板可部分回位。
3、在一些实施例中,所述活动压板和所述固定压板上分别设有加热片,所述加热片分别与所述控制主板电连接。
4、在一些实施例中,所述控制开关包括用于控制所述加热片加热的温度调节旋钮。
5、在一些实施例中,还包括设于所述支架上,位于所述壳体外的预加热件,所述预加热件与所述控制主板电连接,用于对备用的容器进行预加热。
6、在一些实施例中,所述控制开关包括用于控制活动压板的运动速度的速度调节旋钮。
7、在一些实施例中,所述活动压板的移动方向与所述容器受挤压时其内的流体流出方向垂直。
8、在一些实施例中,所述支架上设有接胶盒,所述接胶盒位于所述开口的正下方。
9、在一些实施例中,所述控制开关包括用于控制所述活动压板远离所述固定压板的松瓶旋钮。
10、在一些实施例中,所述活动压板的底部还固定有直线轴承,所述支杆穿设于所述直线轴承内。
11、在一些实施例中,所述容器为瓶装耦合剂,所述瓶装耦合剂沿横向设置在所述容置空间内,所述活动压板和所述固定压板沿所述瓶装耦合剂的径向挤压。
12、本实用新型的一种超声辅助机器人包括:壳体,设有控制开关和开口,壳体内设有支杆、固定压板、活动压板、驱动组件和控制主板,活动压板可沿支杆做轴向运动,与固定压板可形成有用于容纳容器的容置空间,当容器位于容置空间时,其开口端可从开口伸出壳体外;壳体外设有踏板,踏动踏板时,驱动组件可驱动活动压板靠近固定压板,松开踏板后,活动压板可部分回位。本申请的超声辅助机器人通过踏板与活动压板配合,可实现耦合剂的自动挤压,操作省力,方便实用,且能将瓶口的耦合剂回吸,可有效防止多余的耦合剂滴落。
技术特征:
1.一种超声辅助机器人,其特征在于,包括:
2.根据权利要求1所述的超声辅助机器人,其特征在于,
3.根据权利要求2所述的超声辅助机器人,其特征在于,
4.根据权利要求1所述的超声辅助机器人,其特征在于,
5.根据权利要求1所述的超声辅助机器人,其特征在于,
6.根据权利要求1所述的超声辅助机器人,其特征在于,
7.根据权利要求1所述的超声辅助机器人,其特征在于,
8.根据权利要求1所述的超声辅助机器人,其特征在于,
9.根据权利要求1所述的超声辅助机器人,其特征在于,
10.根据权利要求1所述的超声辅助机器人,其特征在于,
技术总结
超声辅助机器人,包括:壳体,壳体内限定收容腔,壳体具有开口,壳体上还设有旋钮;固定压板;多个支杆,固定于固定压板的底端;活动压板,设于固定压板的下方,两者相对且间隔设置并于其间形成用于容纳容器的容置空间,活动压板上对应多个支杆设有多个穿孔,多个支杆分别穿过多个穿孔并与穿孔间隔配合;驱动组件,与活动压板连接,用于驱动活动压板沿支杆相对靠近或远离固定压板运动;控制主板,分别与旋钮和驱动组件电连接;支架,与壳体固定连接;以及踏板,与控制主板电连接;容器具有开口端,当容器位于容置空间时,开口端从开口伸出壳体外;踏动踏板时驱动组件可驱动活动压板靠近固定压板;松开踏板后活动压板可部分回位。
技术研发人员:林风杰,邱锦冰
受保护的技术使用者:深圳市元硕自动化科技有限公司
技术研发日:20230320
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!