一种手术导航定位装置和手术机器人系统的制作方法
本技术属于医疗器械领域,涉及一种手术导航定位装置和手术机器人系统,该系统可用于创伤骨科、脊柱外科、神经外科等需要精准定位的手术操作。
背景技术:
1、随着外科手术理念的不断进步,外科手术逐渐向精准化、微创化发展,而为了达到这一目标,需要解决传统手术两大难题,即“看不见”和“打不准”。“看不见”是指术者由于术野限制无法获得所需解剖信息,故而医生无法判断操作位置的准确性;“打不准”是指徒手操作时,存在手部不稳的问题,尤其是在一些需要精细操作的手术当中,细微的误差极有可能会造成重大的事故。
2、随着计算机导航技术逐渐成熟,手术导航系统(如光电导航、磁导航)被应用于临床手术当中,以期提高手术的准确性,计算机导航通过术前影像和术中解剖进行匹配的方式,解决了传统临床手术“看不见”的问题,但由于导航系统采用徒手操作,仍存在徒手操作不稳的弊病。手术机器人是手术导航联合机械臂的手术系统,机械臂的加入可以提供手术操作所需的稳定性,且机械臂的主动活动相较手持可以更加精确地寻找目标位置。
3、然而,虽然手术机器人系统可以极大提高手术的精确性和稳定性,但也存在如下所示的多方面问题:1.目前手术机器人系统所使用的机械臂大多为工业机械臂,体积较大、较为笨重,需占用较大手术室空间,可能遮挡术者操作;2.传统定位导针/螺钉置入手术,对机械臂刚度要求不高,现有机械臂的刚度过大,存在浪费;3.工业机械臂造假昂贵,提高了手术机器人整体的成本,高售价导致手术机器人难以实现大范围推广。
4、综上所述,传统外科手术存在术野限制和操作误差大的问题,现有手术机器人的设备笨重、可能遮挡术者操作、昂贵、以及存在性能浪费的情况,因而亟需一种轻便、精确、低成本的手术导航定位装置和手术机器人系统。
技术实现思路
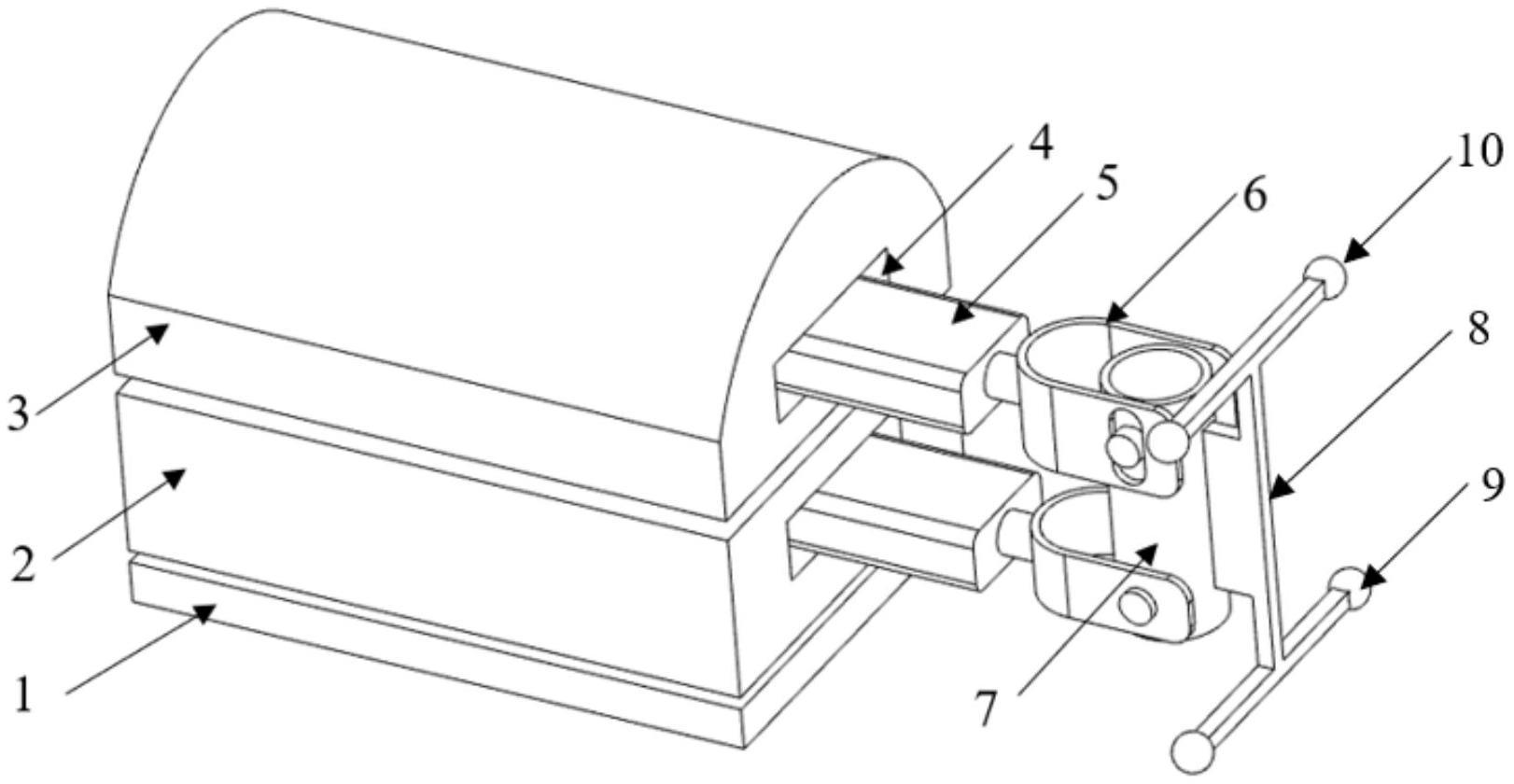
1、本实用新型提供一种手术导航定位装置,所述装置包括:定位装置和追踪单元;
2、所述定位装置包括第一结构单元和堆叠在所述第一结构单元的n个结构单元,以及固定夹和定位套筒;n≥2且为整数;
3、相邻结构单元之间通过机械传动结构连接,通过所述机械传动结构产生相对运动;各结构单元具有前后和左右方向的自由度;
4、所述n个结构单元中的至少两个结构单元内设置槽体,所述槽体内设置连接杆;
5、所述连接杆的一端位于槽体内,另一端伸出槽体;
6、所述固定夹设置在所述连接杆伸出槽体的一端,固定夹的另一端连接定位套筒;
7、所述追踪单元与定位装置连接,所述追踪单元包括示踪器。
8、根据本实用新型的实施方案,所述固定夹、槽体和连接杆的数量相同,例如均等于n;示例性为两个。
9、根据本实用新型的实施方案,所述机械传动结构选自本领域已知结构,能够实现各个结构单元在前后和左右方向上的自由移动即可。例如,所述机械传动结构为已知的双自由度移动平台(包括导轨、丝杆、动力源),设置在各个结构单元的连接处。
10、根据本实用新型的实施方案,所述连接杆在槽体内具有前后和左右方向的自由度。本领域技术人员可以根据需要选择合适的实现连接杆在前后、左右方向上的移动,例如设置导轨、丝杆、动力源等部件。
11、根据本实用新型的实施方案,所述固定夹与连接杆为转动连接,固定夹能够沿水平轴向360°转动。
12、根据本实用新型的实施方案,所述定位套筒通过固定部设置在固定夹上,定位套筒随固定夹的转动而转动。
13、根据本实用新型的实施方案,所述固定夹选自具有开口的环形固定夹,例如为u型固定夹。
14、根据本实用新型的实施方案,所述示踪器通过示踪器固定部与定位套筒连接,示踪器固定部设置在定位套筒朝向(u型)固定夹开口的一面。
15、根据本实用新型的实施方案,所述示踪器的数量为两组,分别设置在示踪器固定部的两端。优选地,每组示踪器的数量为两个。
16、根据本实用新型的实施方案,两组示踪器平行设置。
17、根据本实用新型的实施方案,两组示踪器的垂直距离大于所述定位套筒的高度,且每组示踪器超出与其位于同端的定位套筒的筒口。
18、根据本实用新型的实施方案,所述追踪单元还包括摄像机,优选为红外线双目追踪摄像机。
19、根据本实用新型优选地实施方案,所述手术导航定位装置包括:定位装置和追踪单元;
20、所述定位装置包括第一结构单元和堆叠在所述第一结构单元的第二结构单元和第三结构单元,以及固定夹和定位套筒;
21、相邻结构单元之间通过机械传动结构连接,通过所述机械传动结构产生相对运动,各结构单元具有前后和左右方向上的自由度;
22、所述第二结构单元和第三结构单元内分别设置槽体,每个槽体内设置一个连接杆;
23、所述连接杆的一端位于槽体内,另一端伸出槽体,所述连接杆在槽体内具有前后和左右方向的自由度;
24、所述固定夹设置在所述连接杆伸出槽体的一端,固定夹的另一端连接定位套筒;
25、所述第二结构单元、第三结构单元和/或连接杆运动时能够带动固定夹和定位套筒的运动;
26、所述追踪单元与定位装置连接,包括示踪器。
27、本发明还提供一种手术机器人系统,包括上述导航定位装置。
28、根据本实用新型的实施方案,所述系统还可以包括被动臂。优选地,所述第一结构单元与被动臂连接。通过被动臂,使用时将所述定位装置固定在手术床边。
29、根据本实用新型的实施方案,所述系统还可以包括电源和控制端。优选地,所述固定有连接杆的结构单元均与电源和控制端电连接。
30、根据本实用新型的实施方案,所述系统还可以包括机器人工作站,所述机器人工作站用于接收追踪单元传送的图像数据,进行术前规划等。
31、有益效果
32、本实用新型提供的导航定位装置结构简单且轻便,完全能够替代现有技术手术机器人系统中的机械臂,定位准确,可在保证手术精确性的同时,摒弃机械臂的弊端。
33、具体优势如下:
34、1.提高手术精确性,减少透视次数;
35、2.降低机器人成本,减小普及难度;
36、3.减小体积,利于术者操作。
技术特征:
1.一种手术导航定位装置,其特征在于,所述手术导航定位装置包括:定位装置和追踪单元;
2.根据权利要求1所述的手术导航定位装置,其特征在于,所述固定夹、槽体和连接杆的数量相同。
3.根据权利要求1所述的手术导航定位装置,其特征在于,所述连接杆在槽体内具有前后和左右方向的自由度。
4.根据权利要求1-3任一项所述的手术导航定位装置,其特征在于,所述固定夹与连接杆为转动连接,固定夹能够沿水平轴向360°转动。
5.根据权利要求1-3任一项所述的手术导航定位装置,其特征在于,所述定位套筒通过固定部设置在固定夹上,定位套筒随固定夹的转动而转动。
6.根据权利要求1所述的手术导航定位装置,其特征在于,所述固定夹选自具有开口的环形固定夹。
7.根据权利要求1所述的手术导航定位装置,其特征在于,所述示踪器通过示踪器固定部与定位套筒连接,示踪器固定部设置在定位套筒朝向固定夹开口的一面。
8.根据权利要求7所述的手术导航定位装置,其特征在于,所述示踪器的数量为两组,分别设置在示踪器固定部的两端;
9.根据权利要求1-3任一项所述的手术导航定位装置,其特征在于,所述追踪单元还包括摄像机。
10.一种手术机器人系统,其特征在于,所述手术机器人系统包括权利要求1-9任一项所述的手术导航定位装置。
技术总结
本技术公开一种手术导航定位装置和手术机器人系统。导航定位装置包括:定位装置和追踪单元;定位装置包括第一结构单元和堆叠在第一结构单元的N个结构单元,以及固定夹和定位套筒;N≥2且为整数;相邻结构单元之间通过机械传动结构连接,通过机械传动结构产生相对运动;各结构单元具有前后和左右方向的自由度;N个结构单元中的至少两个结构单元内设置槽体,槽体内设置连接杆;连接杆的一端位于槽体内,另一端伸出槽体;固定夹设置在连接杆伸出槽体的一端,固定夹的另一端连接定位套筒;追踪单元与定位装置连接,追踪单元包括示踪器。该导航定位装置结构简单且轻便,完全能够替代现有技术手术机器人系统中的机械臂。
技术研发人员:韩巍,钟学东,高冠群
受保护的技术使用者:北京慧骨医学科技有限公司
技术研发日:20230511
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!