一种可调式捶背拍打机器人的制作方法
本技术涉及捶背机,具体为一种可调式捶背拍打机器人。
背景技术:
1、捶背可以很好的刺激穴位,暖和背部,有舒筋活血、改善局部营养状态、安神、预防疾病等效果,对长时间从事重体力劳动,或者经常处于一个姿势的情况下可以均匀捶打背部,起到强身健体、舒筋活血的效果,也可以消除身体疲劳感、缓解腰肌劳损,可以有效的促进背部的血液循环、促进新陈代谢,也可以起到延缓皮肤细胞衰老的效果,改善局部营养状态,有助于防止慢性疾病,以及腰肌劳损等疾病的发生,捶背机是一种代替人工手动捶背的机器。
2、授权公开号为cn210904023u的中国专利公开了一种捶背机,涉及按摩机械技术领域。包括从上到下依次连接的装有捶背装置的箱体、支撑柱、底座,捶背装置包括驱动装置、转杆、滑筒、设有锤头的锤杆,转杆的一端与驱动装置连接,转杆远离驱动装置的一端与滑筒铰接,滑筒套在锤杆上,滑筒沿锤杆滑动,锤杆远离锤头的一端与箱体的侧壁铰接,箱体的侧壁设有用于与锤杆配合的避位孔,锤杆在避位孔内上下摆动。本实用新型无需人工按摩,不受人工体力限制,能做到长时间按摩,从而有效缓解人们腰背部疼痛的情况。
3、上述中的捶背机虽不受人工体力限制,能做到长时间按摩,从而有效缓解人们腰背部疼痛的情况,但是捶背机构与人体之间的位置相对固定,适用性受限,如需要调节,则还是需要人工对装置进行移动调节,从而在使用过程中经常需要人为辅助,提高了人工负担,为此,我们提出一种可调式捶背拍打机器人。
技术实现思路
1、本实用新型的目的在于提供一种可调式捶背拍打机器人,以解决上述背景技术中提出由于捶背机构与人体之间的位置相对固定,适用性受限,如需要调节,则还是需要人工对装置进行移动调节,从而在使用过程中经常需要人为辅助,提高了人工负担的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种可调式捶背拍打机器人,包括:
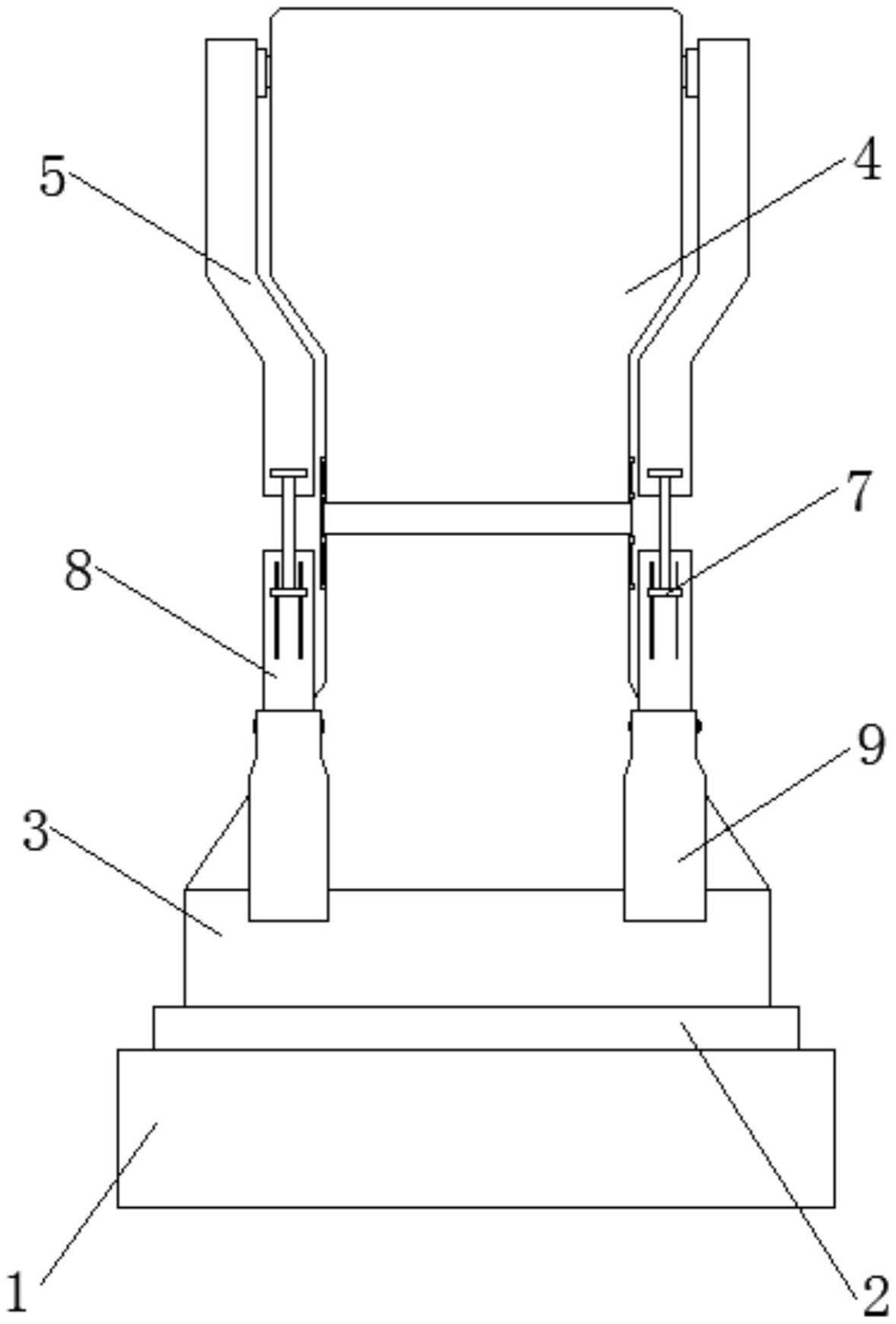
3、底座,所述底座的上方安装有移动座,且移动座的上方安装有支撑座,所述支撑座的上方安装有升降座,且升降座内的两侧均安装有摇摆电机,且摇摆电机的两侧均安装有联动杆,所述联动杆的外侧连接有旋转杆;
4、连接杆,其安装在所述旋转杆的下方,所述连接杆的下方安装有按摩捶,所述连接杆的内部安装有伸缩推杆,所述连接杆外壁的一端安装有限位滑杆;
5、推送凸轮,其安装在所述支撑座与升降座连接处的两侧,所述推送凸轮的一端安装有推送电机;
6、螺母座,其连接在所述移动座下端面的两侧,所述螺母座的内部安装有传送丝杆,且传送丝杆的一端连接有驱动电机。
7、优选的,所述按摩捶还设有:
8、定位销杆,其安装在所述按摩捶的内部,所述按摩捶通过定位销杆与连接杆相连接。
9、优选的,所述伸缩推杆与旋转杆之间构成伸缩结构,所述限位滑杆与连接杆滑动连接。
10、优选的,所述推送电机与推送凸轮之间构成转动结构,且推送凸轮关于升降座的竖直中心线呈对称分布,并且升降座通过滑块与滑杆与支撑座滑动连接。
11、优选的,所述摇摆电机通过连杆与联动杆之间构成转动结构,且联动杆与旋转杆固定连接,并且两个旋转杆交错运动。
12、优选的,所述驱动电机与传送丝杆之间构成转动结构,且传送丝杆贯穿于螺母座的内部。
13、优选的,所述螺母座与移动座焊接连接,且移动座与底座滑动卡合连接。
14、与现有技术相比,本实用新型提供了一种可调式捶背拍打机器人,具备以下有益效果:
15、本实用新型通过推送电机能够带动推送凸轮进行转动,转动的推送凸轮能够带动升降座进行竖直方向的移动,从而便于对装置的高度进行调节,从而能使装置适用于坐姿或躺着的状态,驱动电机能够带动传送丝杆进行转动,转动的传送丝杆能够对螺母座以及移动座进行水平方向的传送,从而能使得装置在捶背过程中进行平移,便于加大捶背的范围,达到更好的使用效果,避免了捶背机构与人体之间的位置相对固定,适用性受限,如需要调节,则还是需要人工对装置进行移动调节,从而在使用过程中经常需要人为辅助,提高了人工负担的问题。
技术特征:
1.一种可调式捶背拍打机器人,其特征在于,包括:
2.根据权利要求1所述的一种可调式捶背拍打机器人,其特征在于,所述按摩捶(9)还设有:
3.根据权利要求1所述的一种可调式捶背拍打机器人,其特征在于,所述伸缩推杆(6)与旋转杆(5)之间构成伸缩结构,所述限位滑杆(7)与连接杆(8)滑动连接。
4.根据权利要求1所述的一种可调式捶背拍打机器人,其特征在于,所述推送电机(12)与推送凸轮(11)之间构成转动结构,且推送凸轮(11)关于升降座(4)的竖直中心线呈对称分布,并且升降座(4)通过滑块与滑杆与支撑座(3)滑动连接。
5.根据权利要求1所述的一种可调式捶背拍打机器人,其特征在于,所述摇摆电机(13)通过连杆与联动杆(14)之间构成转动结构,且联动杆(14)与旋转杆(5)固定连接,并且两个旋转杆(5)交错运动。
6.根据权利要求1所述的一种可调式捶背拍打机器人,其特征在于,所述驱动电机(16)与传送丝杆(17)之间构成转动结构,且传送丝杆(17)贯穿于螺母座(15)的内部。
7.根据权利要求1所述的一种可调式捶背拍打机器人,其特征在于,所述螺母座(15)与移动座(2)焊接连接,且移动座(2)与底座(1)滑动卡合连接。
技术总结
本技术公开了一种可调式捶背拍打机器人,包括底座,所述底座的上方安装有移动座,且移动座的上方安装有支撑座;连接杆,其安装在所述旋转杆的下方,所述连接杆的下方安装有按摩捶;推送凸轮,其安装在所述支撑座与升降座连接处的两侧,所述推送凸轮的一端安装有推送电机;螺母座,其连接在所述移动座下端面的两侧,所述螺母座的内部安装有传送丝杆,且传送丝杆的一端连接有驱动电机。该可调式捶背拍打机器人,与现有的装置相比,通过驱动电机能够带动传送丝杆进行转动,转动的传送丝杆能够对螺母座以及移动座进行水平方向的传送,从而能使得装置在捶背过程中进行平移,便于加大捶背的范围,达到更好的使用效果。
技术研发人员:王世峰
受保护的技术使用者:安徽一锤通物联科技股份有限公司
技术研发日:20230516
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!