机械臂控制的无针注射装置
本技术涉及医用设备,具体为机械臂控制的无针注射装置。
背景技术:
1、由于使用针头注射药物容易使患者产生不适的恐惧感及使用后的针头废弃处理与不慎扎伤感染问题,因此一种无针注射技术乃因应而生。而通过机械臂控制的无针注射器,则是在获取疫苗注射部位的空间位置信息后,自适应机械臂可运动至注射部位附近,应用精准力控算法,确保无针注射器末端密切贴合人体皮肤、并与人体皮肤表面垂直,提升注射效果、降低痛感体验,多自由度的机械臂自适应地完成柔性自动化操作。然后,机器人的无针注射部分,通过高压的水柱,把药液注射到肌肉中,完成疫苗注射过程。
2、现有的机械臂控制的无针注射器在使用后不能进行收起存放,占用较大空间,并且在多次使用之后不能进行喷嘴的更换,喷嘴长时间使用后积存细菌,容易造成交叉感染,对患者的身体健康有不利影响。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。
2、为此,本实用新型的一个目的在于提出机械臂控制的无针注射装置,该机械臂控制的无针注射装置可以更便捷地对注射嘴进行更换,减少喷嘴多次多人使用的情况,防止造成交叉感染,为使用本装置的患者的身体健康提供额外保障。
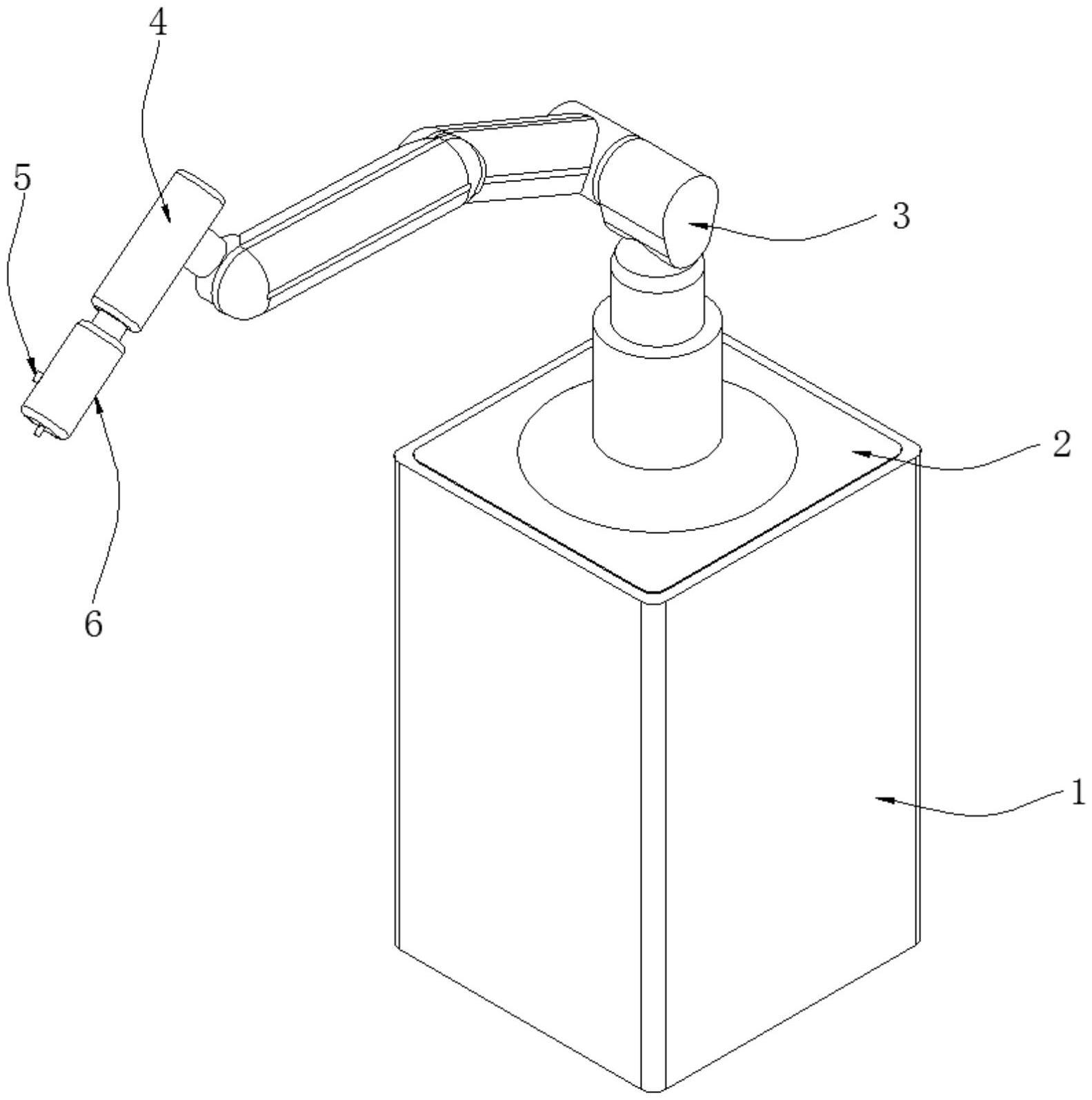
3、为实现上述目的,本实用新型提供如下技术方案:机械臂控制的无针注射装置,包括箱体,所述箱体的内部滑动连接有支撑台,所述支撑台上安装有机械举臂,所述无针注射装置还包括多个电推杆,所述电推杆安装于所述箱体的内底部,所述电推杆的活塞杆端部固定连接于所述支撑台的底部,供药模块,所述供药模块安装于所述机械举臂的一端,所述供药模块的一端安装有筒体,所述筒体的外部螺纹连接有前盖,所述前盖的内部滑动连接有注射嘴,所述注射嘴的一端连通有插管,电磁控制模块,所述电磁控制模块安装于所述筒体的内部,所述筒体的内部依次安装有气缸和雾化喷射模块,所述雾化喷射模块的外部连通有连接管,所述插管插接于所述连接管的内部。
4、优选的,所述箱体的内部固定连接有两个滑轨,两个所述滑轨的内部均安装有多个滑轮,所述支撑台的底部固定连接有两个滑块,所述滑块与所述滑轮滚动连接。
5、优选的,所述连接管的内部固定连接有多个挡片。
6、优选的,所述筒体的外部安装有三维摄像头。
7、优选的,所述支撑台的底部安装有dsp控制器,所述dsp控制器的信号输入端与所述三维摄像头的信号输出端信号连接,所述dsp控制器的电控端与所述机械举臂、所述供药模块、所述电磁控制模块和所述雾化喷射模块的电控输入端电性连接,所述电磁控制模块的电控端与所述气缸的电控输入端电性连接。
8、优选的,所述电推杆的数量不少于两个。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型通过设置升降机构在使用本装置完毕之后向下移动电推杆带动支撑台,从而将机械举臂的下方部位回缩进箱体内,对存放空间进行节省,并通过设置喷雾及更换机构,在注射后能够拧下前盖将注射嘴取下进行更换,拆下时挡片与连接管内壁呈垂直状态,从而阻挡防止异物进入雾化喷射模块,安装时重新将插管插入连接管内,能够更便捷地对注射嘴进行更换,减少喷嘴多次多人使用的情况,防止造成交叉感染,为使用本装置的患者的身体健康提供额外保障。
技术特征:
1.机械臂控制的无针注射装置,包括箱体(1),所述箱体(1)的内部滑动连接有支撑台(2),所述支撑台(2)上安装有机械举臂(3),其特征在于,所述无针注射装置还包括:
2.根据权利要求1所述的机械臂控制的无针注射装置,其特征在于:所述箱体(1)的内部固定连接有两个滑轨(9),两个所述滑轨(9)的内部均安装有多个滑轮(20),所述支撑台(2)的底部固定连接有两个滑块(11),所述滑块(11)与所述滑轮(20)滚动连接。
3.根据权利要求1所述的机械臂控制的无针注射装置,其特征在于:所述连接管(15)的内部固定连接有多个挡片(19)。
4.根据权利要求1所述的机械臂控制的无针注射装置,其特征在于:所述筒体(6)的外部安装有三维摄像头(5)。
5.根据权利要求4所述的机械臂控制的无针注射装置,其特征在于:所述支撑台(2)的底部安装有dsp控制器(10),所述dsp控制器(10)的信号输入端与所述三维摄像头(5)的信号输出端信号连接,所述dsp控制器(10)的电控端与所述机械举臂(3)、所述供药模块(4)、所述电磁控制模块(12)和所述雾化喷射模块(14)的电控输入端电性连接,所述电磁控制模块(12)的电控端与所述气缸(13)的电控输入端电性连接。
6.根据权利要求1所述的机械臂控制的无针注射装置,其特征在于:所述电推杆(8)的数量不少于两个。
技术总结
本技术公开了机械臂控制的无针注射装置,属于医用设备技术领域,包括箱体,所述箱体的内部滑动连接有支撑台,所述支撑台上安装有机械举臂,所述无针注射装置还包括多个电推杆,本技术通过设置升降机构在使用本装置完毕之后向下移动电推杆带动支撑台,从而将机械举臂的下方部位回缩进箱体内,对存放空间进行节省,并通过设置喷雾及更换机构,在注射后能够拧下前盖将注射嘴取下进行更换,拆下时挡片与连接管内壁呈垂直状态,从而阻挡防止异物进入雾化喷射模块,安装时重新将插管插入连接管内,能够更便捷地对注射嘴进行更换,减少喷嘴多次多人使用的情况,防止造成交叉感染,为使用本装置的患者的身体健康提供额外保障。
技术研发人员:孙楠
受保护的技术使用者:中国地质大学(北京)
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!