一种可视机器人与可视图形显示界面的联接系统的制作方法
本技术涉及医疗器械,具体涉及一种可视机器人与可视图形显示界面的联接系统。
背景技术:
1、在医疗过程中,医生需要通过内窥镜等器械观察,实时掌握人体体腔内部情况,从而针对病情进行有效的治疗,内窥镜是一种可以经人体自然腔道或微小创口来进行检查或治疗内部疾病的专用医疗仪器。通过内窥镜可以直观的了解病灶部位,是目前应用广泛的常规检查仪器之一。在很多情况下,内窥镜器械紧固到内窥镜的远端,用于将内窥镜器械引导至特定的治疗部位。许多手术在手术期间使用挠性内窥镜。挠性内窥镜通常在远端附近具有挠性的、可操纵的关节式运动部分,其能够由用户利用近端的控制器进行控制。一些挠性内窥镜较小(直径1mm到3mm),并且可能不具有一体的辅助通道(也称作活检通道或工作通道)。其它挠性内窥镜,包括胃镜和结肠镜,具有直径约2.0mm到3.5mm的一体的工作通道,用于导入或移除医疗设备和其它辅助设备,以在患者体内进行诊断或治疗。因此,医生使用的辅助设备会因使用的内镜的辅助通道的直径而尺寸受到限制。此外,当使用具有一个工作通道的标准内窥镜时,医生可能会受限于单一的辅助设备。虽然已知具有较大工作通道的一些专用内窥镜,并且具有两个工作通道的其他专用内窥镜也是已知的,但是这些大直径/多工作通道的内窥镜相对较贵并且其外径使得内窥镜相对较硬或者很难进行插管。由此,开发了系统使得内窥镜器械紧固到内窥镜的外部,这使得对用于具有较大通道的内窥镜的需求最小化。这些内窥镜器械通常通过使用手术带或缝线紧固到内窥镜上,这些手术带或缝线绕器械和内窥镜以将它们保持在一起的方式进行缠绕。手术带还很难移除和/或重新使用在不同的方位。对于缝线的使用,它们很难用于将内窥镜器械紧固到内窥镜上;因此,如何克服上述存在的技术问题和缺陷成为重点需要解决的问题。
技术实现思路
1、针对内窥镜器械和内窥镜固定和解除方法较为繁琐的问题,本实用新型提供了一种可视机器人与可视图形显示界面的联接系统。
2、本实用新型解决上述技术问题所采用的技术方案如下:
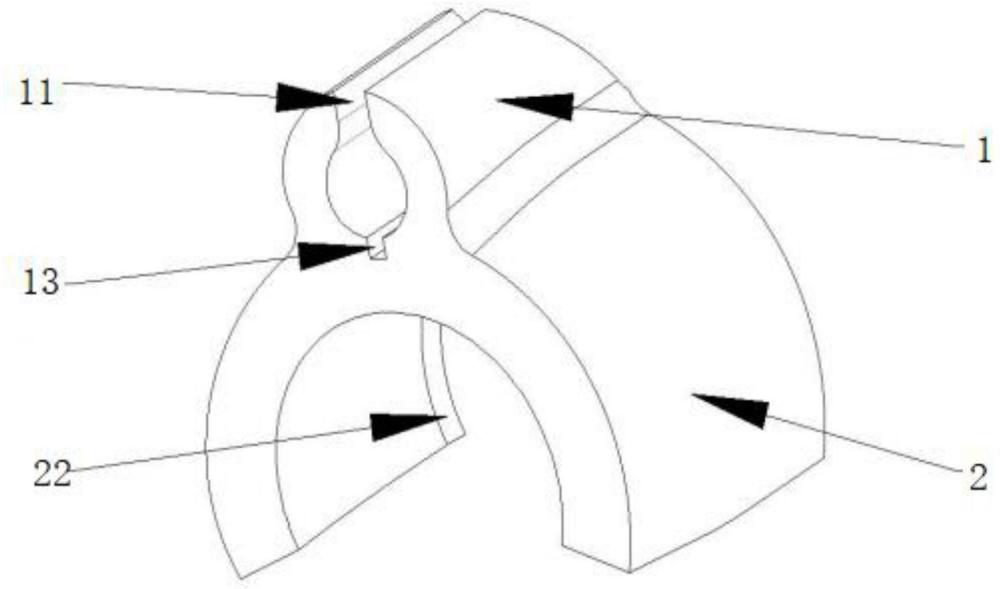
3、本实用新型提供了一种可视机器人与可视图形显示界面的联接系统,所述联接系统包括第一联接系统和第二联接系统,所述第一联接系统和所述第二联接系统连接,所述第一联接系统具有用于容纳可视图形显示界面的第一卡槽,所述第二联接系统具有用于容纳可视机器人的第二卡槽,所述第一卡槽和所述第二卡槽的开口方向相反,所述第一卡槽靠近所述第二联接系统的底壁上设有伸缩凹槽,所述第一卡槽的开口位置形成有伸缩间隙。
4、可选的,所述第一卡槽的口径大于所述可视图形显示界面的口径,所述可视图形显示界面置于所述第一卡槽内,所述可视图形显示界面在所述第一卡槽内可移动。
5、可选的,所述第二卡槽的口径小于所述可视机器人的口径,所述可视机器人置于所述第二卡槽内,所述第二卡槽对所述可视机器人呈夹紧状态。
6、可选的,所述联接系统选自聚乳酸(pla)材质的一体成型结构。
7、可选的,所述第一卡槽为侧壁开口的圆弧状结构,所述第二卡槽为侧壁开口的圆弧状结构,所述第一卡槽和所述第二卡槽的弧度均大于180°。
8、可选的,所述第一卡槽的中心与所述第二卡槽的中心的连线为中轴线,所述第一卡槽和所述第二卡槽关于所述中轴线左右对称。
9、可选的,所述伸缩间隙包括第一伸缩间隙和第二伸缩间隙,所述第一伸缩间隙和所述第二伸缩间隙沿所述第一卡槽的开口位置朝所述第一卡槽的内腔方向依次排列,沿远离所述第一伸缩间隙的方向,所述第二伸缩间隙的内径逐渐扩大。
10、可选的,所述第一伸缩间隙的两侧侧壁互相平行。
11、可选的,所述第二卡槽包括第一容纳腔、第二容纳腔、第三容纳腔,所述第一容纳腔、所述第二容纳腔和所述第三容纳腔依次连接,沿着所述第一容纳腔到所述第二容纳腔的方向,所述第一容纳腔的口径逐渐变大,沿着所述第二容纳腔到所述第三容纳腔的方向,所述第三容纳腔的口径逐渐变小,所述第二容纳腔的口径不变。
12、可选的,还包括防脱倒钩,所述第三容纳腔的内壁设有用于固定所述可视机器人的所述防脱倒钩。
13、根据本实用新型提供的可视机器人与可视图形显示界面的联接系统,通过设置第一联接系统和第二联接系统,从而将可视图形显示界面置于第一卡槽,可视机器人嵌入第二卡槽,从而对可视图形显示界面和可视机器人进行快速固定和拆除;同时,通过设置伸缩凹槽和伸缩间隙,调整第一卡槽与可视图形显示界面间的距离,从而对可视图形显示界面夹紧,使可视图形显示界面不易从第一卡槽内脱离;或者使可视图形显示界面与第一卡槽之间留有缝隙,便于将可视图形显示界面从第一卡槽内取出,本申请的联接系统具有结构简单,安装、拆卸简单、使用方便的优点。
技术特征:
1.一种可视机器人与可视图形显示界面的联接系统,其特征在于:所述联接系统包括第一联接系统和第二联接系统,所述第一联接系统和所述第二联接系统连接,所述第一联接系统具有用于容纳可视图形显示界面的第一卡槽,所述第二联接系统具有用于容纳可视机器人的第二卡槽,所述第一卡槽和所述第二卡槽的开口方向相反,所述第一卡槽靠近所述第二联接系统的底壁上设有伸缩凹槽,所述第一卡槽的开口位置形成有伸缩间隙。
2.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述第一卡槽的口径大于所述可视图形显示界面的口径,所述可视图形显示界面置于所述第一卡槽内,所述可视图形显示界面在所述第一卡槽内可移动。
3.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述第二卡槽的口径小于所述可视机器人的口径,所述可视机器人置于所述第二卡槽内,所述第二卡槽对所述可视机器人呈夹紧状态。
4.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述联接系统选自聚乳酸材质的一体成型结构。
5.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述第一卡槽为侧壁开口的圆弧状结构,所述第二卡槽为侧壁开口的圆弧状结构,所述第一卡槽和所述第二卡槽的弧度均大于180°。
6.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述第一卡槽的中心与所述第二卡槽的中心的连线为中轴线,所述第一卡槽和所述第二卡槽关于所述中轴线左右对称。
7.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述伸缩间隙包括第一伸缩间隙和第二伸缩间隙,所述第一伸缩间隙和所述第二伸缩间隙沿所述第一卡槽的开口位置朝所述第一卡槽的内腔方向依次排列,沿远离所述第一伸缩间隙的方向,所述第二伸缩间隙的内径逐渐扩大。
8.根据权利要求7所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述第一伸缩间隙的两侧侧壁互相平行。
9.根据权利要求1所述的可视机器人与可视图形显示界面的联接系统,其特征在于:所述第二卡槽包括第一容纳腔、第二容纳腔、第三容纳腔,所述第一容纳腔、所述第二容纳腔和所述第三容纳腔依次连接,沿着所述第一容纳腔到所述第二容纳腔的方向,所述第一容纳腔的口径逐渐变大,沿着所述第二容纳腔到所述第三容纳腔的方向,所述第三容纳腔的口径逐渐变小,所述第二容纳腔的口径不变。
10.根据权利要求9所述的可视机器人与可视图形显示界面的联接系统,其特征在于:还包括防脱倒钩,所述第三容纳腔的内壁设有用于固定所述可视机器人的所述防脱倒钩。
技术总结
本技术提供了一种可视机器人与可视图形显示界面的联接系统,联接系统包括第一联接系统和第二联接系统,第一联接系统和第二联接系统连接,第一卡槽和第二卡槽的开口方向相反,第一联接系统靠近第二联接系统的一端设有伸缩凹槽,第一联接系统远离第二联接系统的一端设有伸缩间隙;通过将可视图形显示界面置于第一卡槽,可视机器人嵌入第二卡槽,从而对可视图形显示界面和可视机器人进行快速固定和拆除;同时,通过设置伸缩凹槽和伸缩间隙,调整第一卡槽与可视图形显示界面间的距离,既可以对可视图形显示界面夹紧,也可以将可视图形显示界面从第一卡槽内快速取出,本申请的联接系统具有结构简单,安装、拆卸简单、使用方便的优点。
技术研发人员:包世升,毛延发
受保护的技术使用者:深圳库珀医疗股份有限公司
技术研发日:20230517
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!