手术机器人用主手控制夹和手术机器人的制作方法
本技术涉及医疗器械,尤其涉及一种手术机器人用主手控制夹和手术机器人。
背景技术:
1、手术机器人在辅助外科手术、健康预防、疾病诊疗、康复及医疗服务等领域有独特优势;尤其是在辅助远程微创外科手术过程中,对手术机器人实现指令的精准性和稳定性有很高的要求。
2、手术机器人可包括主手控制夹和耦接于机械臂上的从动器械,在使用手术机器人的手术过程中,术者通过对主手控制夹进行捏合等动作,来远程控制从动器械的夹持等动作。但现有的主手控制夹通过电位计等方式进行按压手柄动作的捕捉,主手控制夹结构复杂且定位精度差,影响手术安全性。
技术实现思路
1、本实用新型提供了一种手术机器人用主手控制夹和手术机器人,以简化主手控制夹结构,并提高主手控制夹中的信号采集准确性,保证手术安全性。
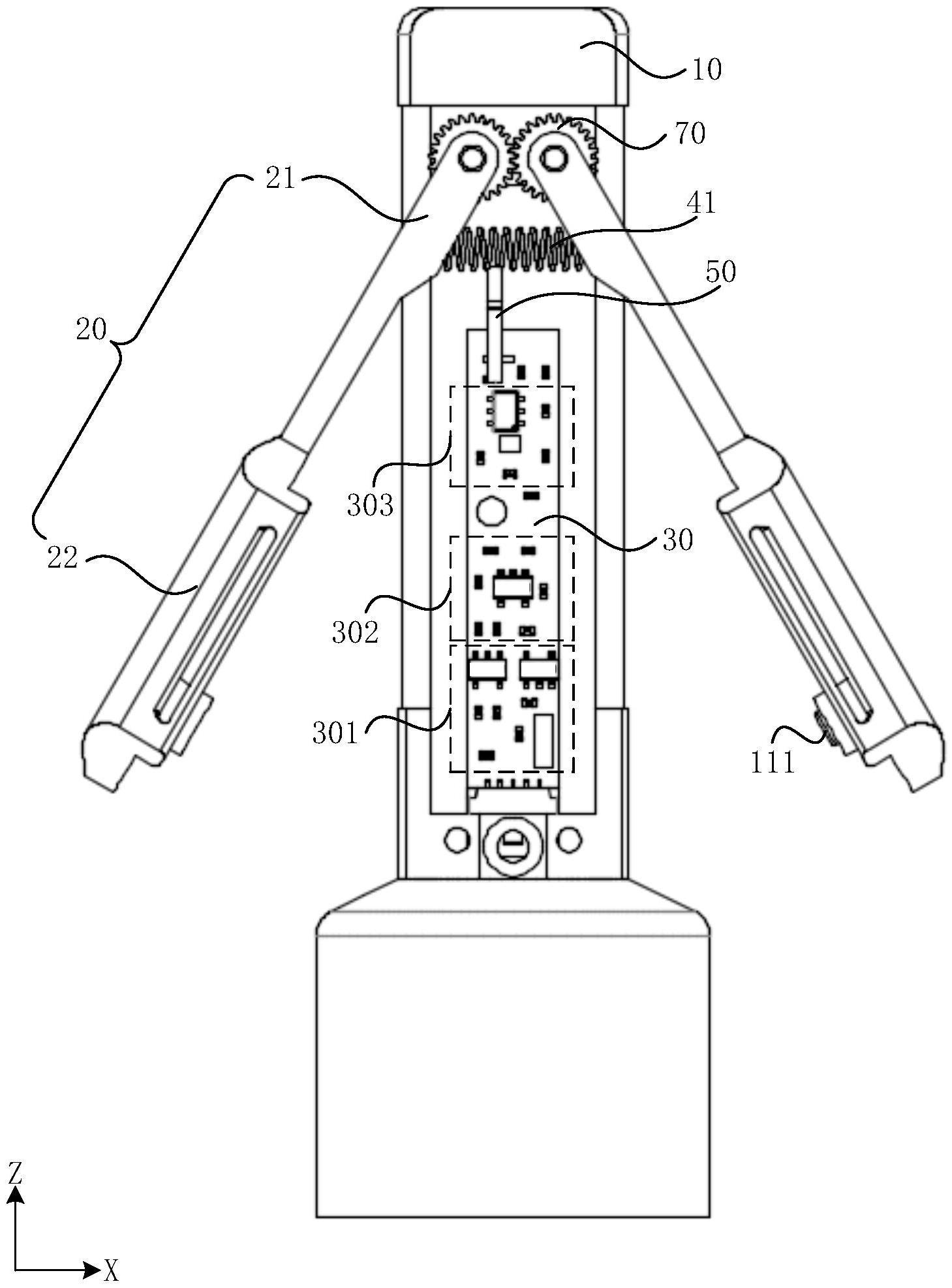
2、第一方面,本实用新型实施例提供了一种手术机器人用主手控制夹,包括:两侧开口的中空的立柱、控制板和两个按压手柄;
3、所述控制板固定设置于所述立柱的内部空间中,两个所述按压手柄的连接部在所述立柱的内部空间的顶部活动连接,且两个所述按压手柄的按压部分别延伸至所述立柱的两侧开口外;
4、其中一个所述按压手柄的按压部靠近所述立柱的一侧设置有第一磁铁,所述控制板上设置有与所述第一磁铁对应的第一磁感应单元,所述第一磁感应单元用于根据所述第一磁铁与所述第一磁感应单元之间的距离确定所述按压手柄的动作状态。
5、可选地,两个所述按压手柄的连接部通过齿轮啮合,两个所述按压手柄在所述立柱的两侧对称设置;
6、所述主手控制夹还包括:第一弹簧,设置于两个所述按压手柄之间;所述第一弹簧的两端分别与两个所述按压手柄固定连接。
7、可选地,所述控制板上还设置有电荷量处理电路;所述电荷量处理电路通过所述第一弹簧与所述按压手柄电连接。
8、可选地,所述手术机器人用主手控制夹,还包括:金属连接片,分别与所述第一弹簧和所述控制板固定连接;所述电荷量处理电路通过所述控制板上的金属走线连接所述金属连接片;
9、其中,在所述立柱的内部空间中,所述控制板、所述金属连接片和所述第一弹簧沿所述立柱的底部到顶部依次排布。
10、可选地,所述立柱的外表面设置有滑槽,所述主手控制夹还包括离合开关,所述离合开关内设置有与所述滑槽相配合的第二磁铁;所述离合开关用于带动所述第二磁铁沿所述滑槽滑动;
11、所述控制板上还设置有与所述第二磁铁对应的第二磁感应单元,所述第二磁感应单元用于根据所述第二磁铁的位置建立或断开所述主手控制夹与从动器械之间的联动。
12、可选地,所述离合开关包括层叠设置的固定板和滑动板,所述离合开关还包括第二弹簧;
13、所述固定板固定于所述立柱的外表面,且暴露出所述滑槽;所述固定板包括开口,所述滑动板包括面板部和凸起部,所述凸起部伸入所述开口中,所述第二弹簧沿所述滑动板的滑动方向设置于所述开口中;其中,所述第二弹簧的一端与所述开口靠近所述滑槽的一端固定连接,所述第二弹簧的另一端与所述凸起部固定连接;所述第二磁铁与所述滑动板固定连接。
14、可选地,所述立柱包括相对设置的第一盖板和第二盖板;所述第一盖板和所述第二盖板的外表面均设置有所述滑槽,两个所述滑槽在所述控制板上的垂直投影重合;所述主手控制夹包括与两个所述滑槽一一对应设置的两个离合开关;
15、两个所述离合开关中的第二磁铁面向所述控制板一侧的极性不同;所述第二磁感应单元包括双输出通道的开关型霍尔传感器,所述开关型霍尔传感器中的两个霍尔元件分别用于感应两个所述第二磁铁的位置。
16、可选地,在所述控制板上,所述第一磁感应单元、所述第二磁感应单元和所述电荷量处理电路沿所述立柱的底部到顶部依次排布。
17、可选地,所述控制板上还设置有电气接口,所述第一磁感应单元、所述第二磁感应单元和所述电荷量处理电路均通过所述控制板上的金属走线连接所述电气接口。
18、第二方面,本实用新型实施例还提供了一种手术机器人,包括:如本实用新型任意实施例所提供的手术机器人用主手控制夹。
19、本实用新型实施例中,直接将第一磁铁设置在按压手柄上,第一磁感应单元通过感知第一磁铁的位置,可以直观获取按压手柄的张开程度。相比于现有技术中通过获取两按压手柄之间的连杆在上下方向上的位移来间接获取按压手柄张开角度的方案,本实施例的感应方式更直接,信号转换误差更小,且无须设置两按压部之间的连杆,使得主手控制夹结构简单。并且,相比于现有技术中通过旋转电位计确定按压手柄张开角度的方案,本实施例的结构更简单,可以减小第一磁感应单元对立柱内部空间的占用,有利于减小立柱的体积,降低对主手控制夹机械结构的要求和设计难度。以及,本实施例将第一磁铁设置于按压手柄的按压部,按压部作为按压手柄的运动远端,远离两按压手柄的连接部位,在按压手柄张开同样程度的情况下,按压部的位移较大,因此将第一磁铁固定于按压部有利于提高感应灵敏度和准确性。同时,将第一磁铁设置在按压部靠近立柱的一侧也有利于缩短第一磁感应单元的感应距离,提高第一磁感应单元的输出准确性。因此,相比于现有技术,本实用新型实施例可以简化主手控制夹结构,并提高主手控制夹中的信号采集准确性,保证手术安全性。
20、应当理解,本部分所描述的内容并非旨在标识本实用新型的实施例的关键或重要特征,也不用于限制本实用新型的范围。本实用新型的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种手术机器人用主手控制夹,其特征在于,包括:两侧开口的中空的立柱、控制板和两个按压手柄;
2.根据权利要求1所述的手术机器人用主手控制夹,其特征在于,两个所述按压手柄的连接部通过齿轮啮合,两个所述按压手柄在所述立柱的两侧对称设置;
3.根据权利要求2所述的手术机器人用主手控制夹,其特征在于,所述控制板上还设置有电荷量处理电路;所述电荷量处理电路通过所述第一弹簧与所述按压手柄电连接。
4.根据权利要求3所述的手术机器人用主手控制夹,其特征在于,还包括:金属连接片,分别与所述第一弹簧和所述控制板固定连接;所述电荷量处理电路通过所述控制板上的金属走线连接所述金属连接片;
5.根据权利要求3所述的手术机器人用主手控制夹,其特征在于,所述立柱的外表面设置有滑槽,所述主手控制夹还包括离合开关,所述离合开关内设置有与所述滑槽相配合的第二磁铁;所述离合开关用于带动所述第二磁铁沿所述滑槽滑动;
6.根据权利要求5所述的手术机器人用主手控制夹,其特征在于,所述离合开关包括层叠设置的固定板和滑动板,所述离合开关还包括第二弹簧;
7.根据权利要求5或6所述的手术机器人用主手控制夹,其特征在于,所述立柱包括相对设置的第一盖板和第二盖板;所述第一盖板和所述第二盖板的外表面均设置有所述滑槽,两个所述滑槽在所述控制板上的垂直投影重合;所述主手控制夹包括与两个所述滑槽一一对应设置的两个离合开关;
8.根据权利要求5所述的手术机器人用主手控制夹,其特征在于,在所述控制板上,所述第一磁感应单元、所述第二磁感应单元和所述电荷量处理电路沿所述立柱的底部到顶部依次排布。
9.根据权利要求5所述的手术机器人用主手控制夹,其特征在于,所述控制板上还设置有电气接口,所述第一磁感应单元、所述第二磁感应单元和所述电荷量处理电路均通过所述控制板上的金属走线连接所述电气接口。
10.一种手术机器人,其特征在于,包括:如权利要求1-9任一项所述的手术机器人用主手控制夹。
技术总结
本技术公开了一种手术机器人用主手控制夹和手术机器人。主手控制夹包括:两侧开口的中空的立柱、控制板和两个按压手柄;所述控制板固定设置于所述立柱的内部空间中,两个所述按压手柄的连接部在所述立柱的内部空间的顶部活动连接,且两个所述按压手柄的按压部分别延伸至所述立柱的两侧开口外;其中一个所述按压手柄的按压部靠近所述立柱的一侧设置有第一磁铁,所述控制板上设置有与所述第一磁铁对应的第一磁感应单元,所述第一磁感应单元用于根据所述第一磁铁与所述第一磁感应单元之间的距离确定所述按压手柄的动作状态。本技术实施例可以简化主手控制夹结构,并提高主手控制夹中的信号采集准确性,保证手术安全性。
技术研发人员:史鹏
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!