一种用于机器人操控台的多功能升降台的制作方法
本技术涉及医疗手术机器人,具体涉及一种用于机器人操控台的多功能升降台。
背景技术:
1、机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
2、目前在操作手术机器人手术过程中需要记录手术数据,由于手术机器人操控台较为窄小,操控台的高度固定不能进行调整,不方便医护人员放置病例和记录本,医护人员常常需要站立在手术机器人操控台旁边,手持记录本记录数据,劳动强度高,工作效率低,因此需要提供一种用于机器人操控台的多功能升降台。
技术实现思路
1、本实用新型所要解决的技术问题是针对上述现有技术的不足,提供一种机器人操控台的多功能升降台。
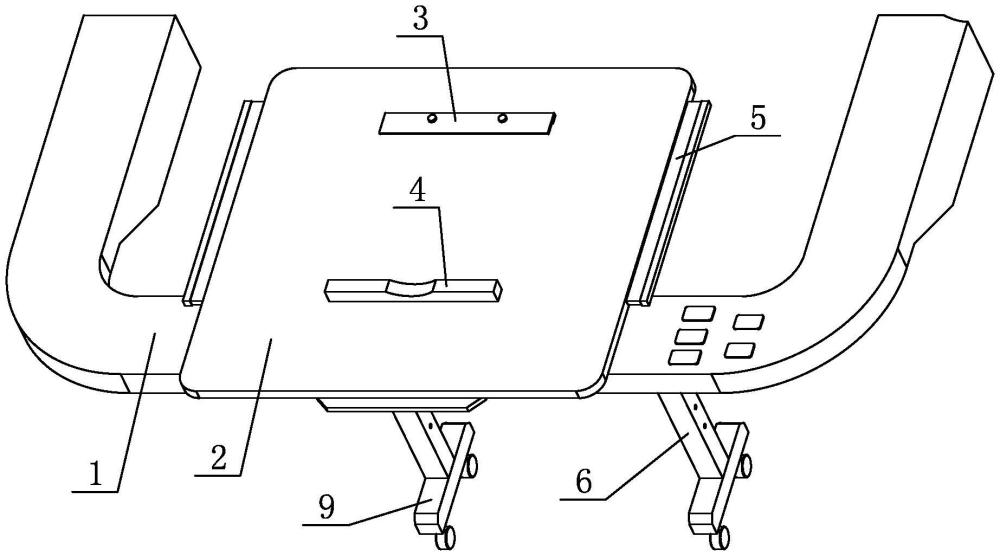
2、本实用新型为解决上述问题采取的技术方案是:一种用于机器人操控台的多功能升降台,包括工作台、支撑腿、锁紧机构、限位机构和底座;所述工作台通过锁紧机构连接在支撑腿的上部,所述支撑腿的下部设置有底座,所述底座上设置有活动轮,所述限位机构包括挡板和限位螺丝,所述挡板通过转轴转动连接在工作台的底部,所述挡板与转轴连接的位置设置有限位螺丝,所述升降台用于手术机器人,所述升降台通过挡板与机器人操控台连接。
3、进一步地,所述支撑腿包括固定杆和伸缩杆上下两部分,所述固定杆和伸缩杆通过滑槽滑轨连接,所述伸缩杆的侧壁上设置有多个限位孔,所述限位孔里安装有限位机构。
4、进一步地,所述锁紧机构包括锁紧螺母和锁紧螺丝;所述固定杆通过锁紧螺丝与工作台活动连接,所述锁紧螺丝的一端连接有锁紧螺母。
5、进一步地,所述固定杆的数量为两个,两个固定杆间连接有加强杆。
6、进一步地,所述限位机构为弹簧钢珠。
7、进一步地,所述工作台的上端面设置有资料夹和挡板。
8、进一步地,所述工作台的左右两侧面滑动连接有伸缩板。
9、进一步地,所述活动轮为万向轮。
10、进一步地,所述活动轮上设置有刹车装置。
11、本实用新型具有以下有益技术效果:
12、本实用新型在使用时将升降台放置在手术机器人的操作台上,通过固定杆和伸缩杆的相对滑动调节升降台的高度,伸缩杆的侧壁上设置有多个限位孔,固定杆和伸缩杆上升或下降可调节多个高度,方便地对升降台进行高度调整,同时通过挡板旋转到合适角度后设置在机器人操控台的前后两侧,限位固定升降台的位置不会移动,操作稳定。
13、本实用新型采用的工作台能够通过锁紧机构调节水平角度,适应范围广,医务人员将记录本放置在升降台上后坐着记录手术数据,提高手术机器人工作效率,减轻医务人员的工作强度。
技术特征:
1.一种用于机器人操控台的多功能升降台,其特征在于:所述升降台包括工作台(2)、支撑腿(6)、锁紧机构(7)、限位机构(8)和底座(9);所述工作台(2)通过锁紧机构(7)连接在支撑腿(6)的上部,所述支撑腿(6)的下部设置有底座(9),所述底座(9)上设置有活动轮(10),所述限位机构(8)包括限位板(81)和限位螺丝(82),所述限位板(81)通过转轴转动连接在工作台(2)的底部,所述限位板(81)与转轴连接的位置设置有限位螺丝(82),所述升降台用于手术机器人,所述升降台通过限位板(81)与机器人操控台(1)连接。
2.根据权利要求1所述的一种用于机器人操控台的多功能升降台,其特征在于:所述支撑腿(6)包括固定杆(61)和伸缩杆(62)上下两部分,所述固定杆(61)和伸缩杆(62)通过滑槽滑轨连接,所述伸缩杆(62)的侧壁上设置有多个限位孔,所述限位孔里安装有限位机构。
3.根据权利要求2所述的一种用于机器人操控台的多功能升降台,其特征在于:所述锁紧机构(7)包括锁紧螺母(71)和锁紧螺丝(72);所述固定杆(61)通过锁紧螺丝(72)与工作台(2)活动连接,所述锁紧螺丝(72)的一端连接有锁紧螺母(71)。
4.根据权利要求2所述的一种用于机器人操控台的多功能升降台,其特征在于:所述固定杆(61)的数量为两个,两个固定杆(61)间连接有加强杆(64)。
5.根据权利要求2所述的一种用于机器人操控台的多功能升降台,其特征在于:所述限位机构为弹簧钢珠(63)。
6.根据权利要求1所述的一种用于机器人操控台的多功能升降台,其特征在于:所述工作台(2)的上端面设置有资料夹(3)和挡板(4)。
7.根据权利要求1所述的一种用于机器人操控台的多功能升降台,其特征在于:所述工作台(2)的左右两侧面滑动连接有伸缩板(5)。
8.根据权利要求1所述的一种用于机器人操控台的多功能升降台,其特征在于:所述活动轮(10)为万向轮。
技术总结
一种用于机器人操控台的多功能升降台,本技术涉及医疗手术机器人技术领域。本技术为了解决现有技术中在操作手术机器人手术过程中需要记录手术数据,由于手术机器人操控台较为窄小,操控台的高度固定不能进行调整,不方便医护人员发放置病例和记录本,医护人员常常需要站立在手术机器人操控台旁边,手持记录本记录数据,劳动强度高,工作效率低。本技术包括工作台、支撑腿、锁紧机构、限位机构和底座;所述工作台通过锁紧机构连接在支撑腿的上部,所述支撑腿的下部设置有底座,所述底座上设置有活动轮,所述限位机构包括挡板和限位螺丝。本技术用于医疗手术机器人。
技术研发人员:李俊
受保护的技术使用者:北京医院
技术研发日:20230727
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!