一种椎弓根置钉路径规划方法
本发明涉及图像处理,尤其涉及一种椎弓根置钉路径规划方法。
背景技术:
1、随着生物医学工程和计算机技术的发展,医学影像学为临床诊断提供了多模态的医学图像。在当今临床领域中,这些医学图像正扮演着越来越重要的角色,不仅应用于医疗诊断,还可用于手术计划的制定、放射治疗计划的制定、病理变化的跟踪和治疗效果评价等各个方面。在脊柱外科手术方面,椎弓根螺钉置钉的准确性影响了手术的效率及效果,是脊柱外科手术的重点。
2、目前椎弓根螺钉的置钉方法众多,但是对于置钉位置的解算过程复杂,往往需要大量的计算过程才可得出适用的置钉位姿;此外,由于椎弓根结构的特殊性,置钉的位置不够准确,无法达到治疗的预期效果。
技术实现思路
1、发明目的:针对上述不足,本发明提出一种椎弓根置钉路径规划方法,规划的椎弓根置钉路径更加精确。
2、技术方案:一种椎弓根置钉路径规划方法,包括:
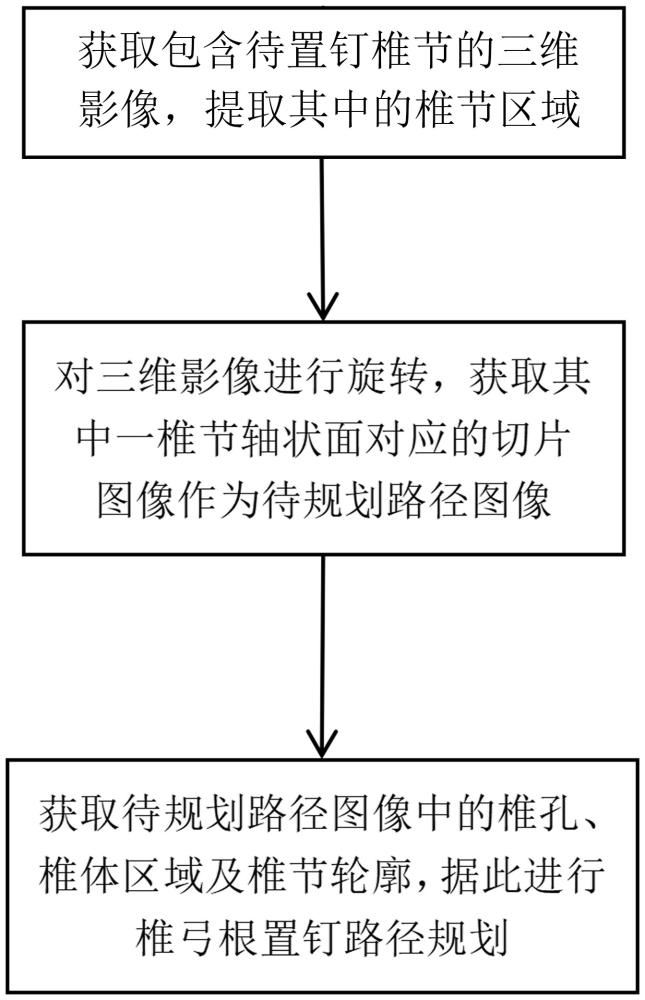
3、s1、获取包含待置钉椎节的三维影像,提取其中的椎节区域;
4、s2、基于所述各序列影像的椎节区域建立椎节坐标系,并以所述椎节坐标系为基准对所述三维影像进行旋转,获取其中一椎节轴状面对应的切片图像作为待规划路径图像;
5、s3、获取所述待规划路径图像中的椎孔、椎体区域及椎节轮廓,并据此进行椎弓根置钉路径规划。
6、具体地,所述s2中,所述基于所述三维影像中的椎节区域建立椎节坐标系,具体为:
7、基于所述三维影像中的椎节区域获取其沿人体头脚方向的投影图像及其中椎节的近似几何中心,以所述近似几何中心作为原点;以人体头脚方向为z轴方向,以穿过该近似几何中心并从椎孔指向椎体的方向作为y轴方向,通过右手定则确定x轴方向,由此建立得到椎节坐标系。
8、更具体地,所述s2中,获取三维影像中椎节区域的轴状面对应的切片图像,选取其中包含椎孔区域的图像序列,以所述图像序列中位于中间位置的图像作为待规划路径图像。
9、更进一步地,以所述待规划路径图像中提取的椎节的近似几何中心作为最终椎节坐标系的原点,结合前述得到的x、y、z轴方向得到最终椎节坐标系。
10、更具体地,通过二值化、形态学和blob分析获取图像中椎节的近似几何中心。
11、具体地,所述s2中,对所述包含待置钉椎节的三维影像进行旋转,使得所述椎节坐标系的x、y轴方向分别至水平、竖直方向。
12、具体地,所述s3中,采用二值化、形态学和blob分析得到待规划路径图像中对应椎节的近似图形,并分别确定所述近似图形中的椎孔区域、椎体区域及椎节轮廓。
13、更具体地,所述确定所述近似图形中的椎孔区域、椎体区域及椎节轮廓具体为:
14、1)对所述近似图形进行二值化分割及图像填充,将其与所述近似图形作差,并在此基础上进行连通域分析得到椎孔区域;
15、2)对所述近似图形进行二值化分割及图像填充,去除1)得到的椎孔区域,并通过若干次开运算得到椎体区域;
16、3)对所述近似图形进行图像填充,在此基础上以圆形结构进行开运算,并通过连通域分析选取其中面积最大的区域,其轮廓即为椎节轮廓。
17、更进一步地,所述椎弓根置钉路径规划具体为:
18、分别获取所述近似图形中的椎孔区域、椎体区域的几何中心c1和c2,得到椎体区域的几何中心c2和其最下端边界位置点d之间连线的中点m;
19、分别获取椎孔区域的几何中心c1与椎孔区域最左侧位置点hl和最右侧位置点hr之间的连线,得到其延长线与椎节轮廓c的第一交点ul和ur,进而得到椎孔区域最左侧位置点hl与第一交点ul之间的中点p1及椎孔区域最右侧位置点hr与第一交点ur之间的中点p2;
20、获取椎孔区域的几何中心c1和中点m的连线,得到一垂直于该连线并过中点m的直线,获取该直线与椎节轮廓c的第二交点bl和br,进而得到中点m与两第二交点bl和br之间的中点p3、p4,此即为两椎弓根螺钉的出点位置;
21、分别连接p3、p1和p4、p2,并获取二者延长线与椎节轮廓c的交点p5、p6,此即为两椎弓根螺钉的入点位置;
22、基于前述即可得到椎弓根置钉路径。
23、具体地,所述s1中,所述提取包含待置钉椎节的三维影像中的椎节区域影像具体为:
24、对包含待置钉椎节的三维影像的各序列影像解析为包含灰度值或ct值的三维点云信息,据此通过阈值分割或窗位窗宽算法将其中的非骨骼区域对应的点云剔除,进而得到椎节区域影像。
25、有益效果:本发明可从医学三维影像中读取的切片图像中规划出置钉路径,且规划的椎弓根螺钉置钉路径更加精确,且本发明的规划过程简单,无需复杂的解算过程,规划速度更快;且在可以保证螺钉完全进入椎体并穿过椎弓根的同时,不会引起椎弓根的开裂,保障了对于椎体的固定效果,更有利于稳定脊柱。
技术特征:
1.一种椎弓根置钉路径规划方法,其特征在于,包括:
2.根据权利要求1所述的椎弓根置钉路径规划方法,其特征在于,所述s2中,所述基于所述三维影像中的椎节区域建立椎节坐标系,具体为:
3.根据权利要求2所述的椎弓根置钉路径规划方法,其特征在于,所述s2中,获取三维影像中椎节区域的轴状面对应的切片图像,选取其中包含椎孔区域的图像序列,以所述图像序列中位于中间位置的图像作为待规划路径图像。
4.根据权利要求3所述的椎弓根置钉路径规划方法,其特征在于,以所述待规划路径图像中提取的椎节的近似几何中心作为最终椎节坐标系的原点,结合前述得到的x、y、z轴方向得到最终椎节坐标系。
5.根据权利要求2或4所述的椎弓根置钉路径规划方法,其特征在于,通过二值化、形态学和blob分析获取图像中椎节的近似几何中心。
6.根据权利要求2或4所述的椎弓根置钉路径规划方法,其特征在于,所述s2中,对所述包含待置钉椎节的三维影像进行旋转,使得所述椎节坐标系的x、y轴方向分别至水平、竖直方向。
7.根据权利要求1所述的椎弓根置钉路径规划方法,其特征在于,所述s3中,采用二值化、形态学和blob分析得到待规划路径图像中对应椎节的近似图形,并分别确定所述近似图形中的椎孔区域、椎体区域及椎节轮廓。
8.根据权利要求7所述的椎弓根置钉路径规划方法,其特征在于,所述确定所述近似图形中的椎孔区域、椎体区域及椎节轮廓具体为:
9.根据权利要求8所述的椎弓根置钉路径规划方法,其特征在于,所述椎弓根置钉路径规划具体为:
10.根据权利要求1所述的椎弓根置钉路径规划方法,其特征在于,所述s1中,所述提取包含待置钉椎节的三维影像中的椎节区域影像具体为:
技术总结
本发明公开了一种椎弓根置钉路径规划方法,包括:S1、获取包含待置钉椎节的三维影像,提取其中的椎节区域;S2、基于所述各序列影像的椎节区域建立椎节坐标系,并以所述椎节坐标系为基准对所述三维影像进行旋转,获取其中一椎节轴状面对应的切片图像作为待规划路径图像;S3、获取所述待规划路径图像中的椎孔、椎体区域及椎节轮廓,并据此进行椎弓根置钉路径规划。本发明可从医学三维影像中读取的切片图像中规划出置钉路径,高效、准确、固定效果好。
技术研发人员:吴敏飞,矫健航,于同,姜炜博,王中汉,牛恒泰
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!