一种微创手术夹钳
本发明涉及医疗器械,尤其是指一种微创手术夹钳。
背景技术:
1、机器人辅助微创手术(risk management information system,rmis)由于其显著优势,例如切口尺寸小、术中失血少、术后感染风险低和恢复时间短,已被引入作为首选手术方法之一。
2、随着机器人辅助微创手术技术的不断提升和普及,对手术器械的精确力度控制需求越来越高,手术器械在手术过程中需要精准地施加力度,以便进行切割、缝合和防止大量出血等。
3、传统的手术器械是非智能的,无法准确感知施加在组织上的力度,也无法根据手术情况进行精准控制。在某些情况下,手术器械可能会施加过度的力度,导致手术过程中的伤害和并发症。
4、因此,具有力感知功能的微创手术夹钳应运而生。这种手术器械可以通过传感器等装置,准确感知施加在组织上的力度,以便实现精确的力度控制。这种技术的应用可以大大提高手术操作的安全性和准确性,同时增强微创手术的可操作性。
5、然而,手术夹取和缝合不同部位需要用到不同的力度,不同手术操作往往需要不同夹持力,现有微创手术夹钳的力感知功能不具备灵敏度可调的能力。
6、因此,目前迫切需要一种可以根据具体手术操作需求,通过调节器械的灵敏度设置,实现器械使用力度的精确控制的微创手术夹钳。
技术实现思路
1、针对现有技术的不足,本发明公开了一种微创手术夹钳。
2、本发明所采用的技术方案如下:
3、一种微创手术夹钳,包括:
4、支架;
5、夹钳模块,安装于所述支架;所述夹钳模块包括铰接的第一夹钳和第二夹钳;所述第一夹钳和所述第二夹钳均包括盖体和底座,所述盖体和所述底座之间安装有弹性体和柔性pcb板;
6、感应模块,安装于所述第一夹钳或所述第二夹钳内;所述感应模块包括传感器芯片、力传递层和弹性层,所述弹性层和所述弹性体相对,所述传感器芯片和所述柔性pcb板电连接,所述力传递层粘附于所述柔性pcb板;
7、当外力施加在夹钳模块上时,所述弹性体发生形变,并挤压所述弹性层,所述弹性层将力通过所述力传递层传递至所述传感器芯片。
8、在本发明的一个实施例中,所述传感器芯片设有多个具有压敏电阻的悬臂梁;所述力传递层包括多个凸起单元,所述凸起单元的数量和位置分别与所述悬臂梁的数量和位置对应。
9、在本发明的一个实施例中,所述悬臂梁有四个,相邻两个所述悬臂梁之间形成90°的夹角。
10、在本发明的一个实施例中,所述力传递层的材质为聚二甲基硅氧烷。
11、在本发明的一个实施例中,所述弹性层包括表层、液态金属层和基底,所述液态金属层设于所述表层和所述基底之间,且所述液态金属层设有电阻丝,所述电阻丝和所述力传递层连接。
12、在本发明的一个实施例中,所述表层和所述基底的材质为聚二甲基硅氧烷。
13、在本发明的一个实施例中,所述传感器芯片嵌合在所述力传递层内,且所述传感器芯片粘附于所述力传递层。
14、在本发明的一个实施例中,所述力传递层设有定位柱,所述传感器芯片设有定位孔,所述定位柱插入所述定位孔内。
15、在本发明的一个实施例中,所述夹钳模块还包括限位元件,所述第一夹钳和所述第二夹钳均开设滑槽,所述第一夹钳和所述第二夹钳相对张开或闭合时,所述限位元件在所述滑槽内滑动。
16、在本发明的一个实施例中,述第一夹钳的表面和所述第二夹钳的表面设有持针稳固凹槽,用于稳固夹钳生物组织。
17、本发明的上述技术方案相比现有技术具有以下优点:
18、本发明所述的微创手术夹钳具有可调力感知功能的微创手术夹钳,将灵敏度可调的mems三维力传感器与手术夹钳进行一体化集成,通过内置的传感器,消除刚度、摩擦、重力、惯性等干扰因素的影响,将不同交互作用力直接检测出,实现手术器械灵敏度可调以及量程可调,适用于多种微创手术操作中,如夹持组织、缝针等。由于它可以灵活感知所施加的力度,因此适用于各种不同类型的器官和组织操作中,实现一钳多用。
19、具体而言,微创手术夹钳在执行夹持动作时,夹钳的钳制端由于较大的刚度不会发生变形,而弹性体则在应力作用下发生形变。感应模块的弹性层会发生形变,不同温度下,弹性层中液态金属的相态不同,弹性层的杨氏模量不同,变形能力也不同,对力的敏感度不同,传递到力敏感芯片的力会不同,悬臂梁会产生不同程度应变。通过mems离子注入工艺注入在悬臂梁上的压敏电阻的阻值变化,从而可以测出单只夹钳的三维力。通过控制传感器的工作温度,可以控制传感器的灵敏度与量程,进而控制夹钳的力感知功能。
20、本发明所述的微创手术夹钳可以帮助外科医生更高效地进行手术操作,医生可以根据力度反馈进行快速调整,并更好地掌控手术过程中的力度,从而提高手术的效率和成功率从而降低医疗费用;同时,它还可以减少手术并发症发生的风险,从而降低患者治疗费用。
技术特征:
1.一种微创手术夹钳,其特征在于,包括:
2.根据权利要求1所述的微创手术夹钳,其特征在于,所述传感器芯片(310)设有多个具有压敏电阻(311)的悬臂梁(312);所述力传递层(320)包括多个凸起单元,所述凸起单元的数量和位置分别与所述悬臂梁(312)的数量和位置对应。
3.根据权利要求2所述的微创手术夹钳,其特征在于,所述悬臂梁(312)有四个,相邻两个所述悬臂梁(312)之间形成90°的夹角。
4.根据权利要求2所述的微创手术夹钳,其特征在于,所述力传递层(320)的材质为聚二甲基硅氧烷。
5.根据权利要求1所述的微创手术夹钳,其特征在于,所述弹性层(330)包括表层(331)、液态金属层(332)和基底(334),所述液态金属层(332)设于所述表层(331)和所述基底(334)之间,且所述液态金属层(332)设有电阻丝(333),所述电阻丝(333)和所述力传递层(320)连接。
6.根据权利要求5所述的微创手术夹钳,其特征在于,所述表层(331)和所述基底(334)的材质为聚二甲基硅氧烷。
7.根据权利要求1所述的微创手术夹钳,其特征在于,所述传感器芯片(310)嵌合在所述力传递层(320)内,且所述传感器芯片(310)粘附于所述力传递层(320)。
8.根据权利要求1所述的微创手术夹钳,其特征在于,所述力传递层(320)设有定位柱,所述传感器芯片(310)设有定位孔,所述定位柱插入所述定位孔内。
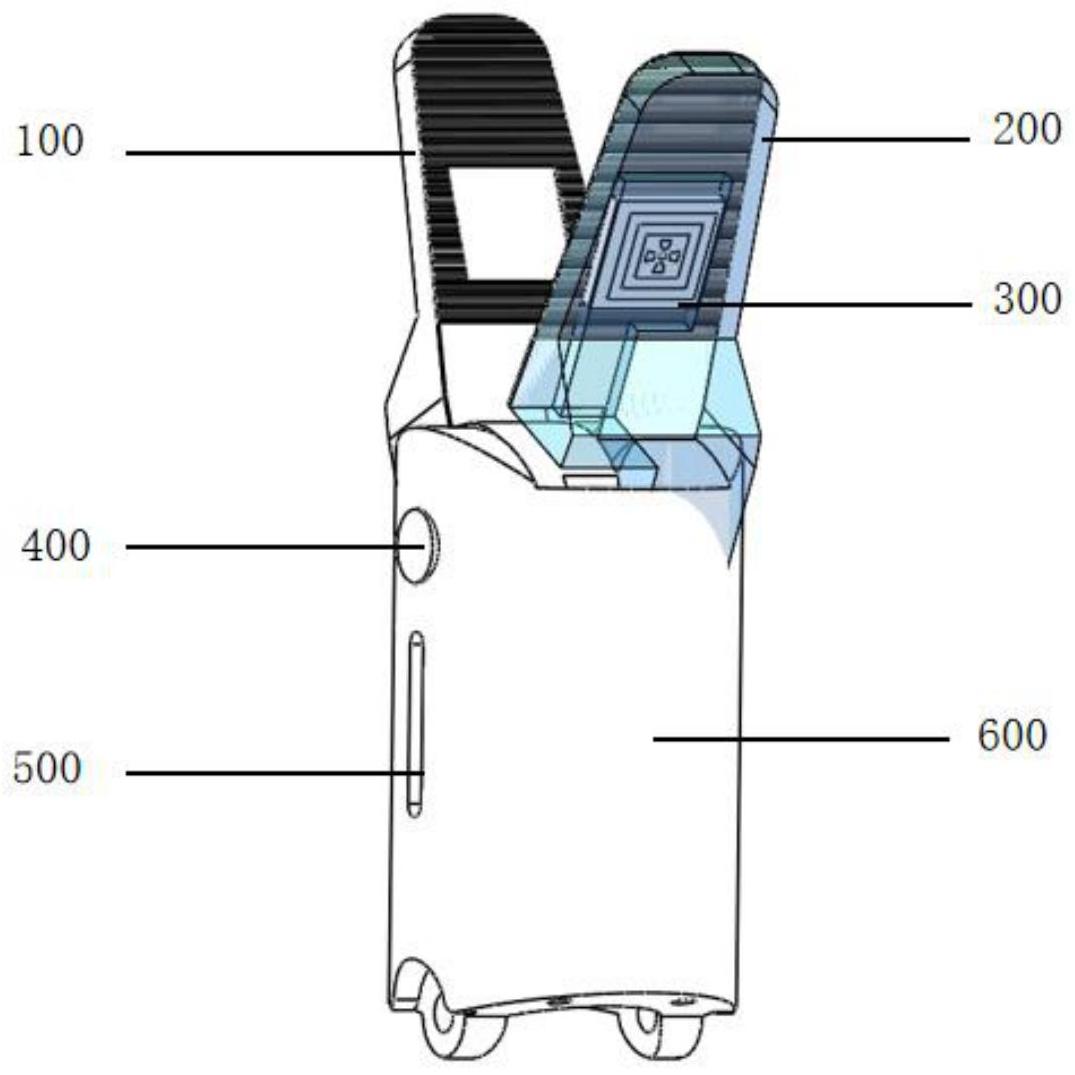
9.根据权利要求1所述的微创手术夹钳,其特征在于,所述夹钳模块还包括限位元件(500),所述第一夹钳(100)和所述第二夹钳(200)均开设滑槽,所述第一夹钳(100)和所述第二夹钳(200)相对张开或闭合时,所述限位元件(500)在所述滑槽内滑动。
10.根据权利要求1所述的微创手术夹钳,其特征在于,所述第一夹钳(100)的表面和所述第二夹钳(200)的表面设有持针稳固凹槽,用于稳固夹钳生物组织。
技术总结
本发明涉及一种微创手术夹钳,包括:支架;夹钳模块,安装于支架;夹钳模块包括铰接的第一夹钳和第二夹钳;第一夹钳和第二夹钳均包括盖体和底座,盖体和底座之间安装有弹性体和柔性PCB板;感应模块,安装于第一夹钳或第二夹钳内;感应模块包括传感器芯片、力传递层和弹性层,弹性层和弹性体相对,传感器芯片和柔性PCB板电连接,力传递层粘附于柔性PCB板;当外力施加在夹钳模块上时,弹性体发生形变,并挤压弹性层,弹性层将力通过力传递层传递至传感器芯片。本发明具将灵敏度可调的MEMS三维力传感器与手术夹钳进行一体化集成,消除刚度、摩擦、重力、惯性等干扰因素的影响,将不同交互作用力直接检测出,实现手术器械灵敏度可调以及量程可调。
技术研发人员:刘会聪,李澳门,李东升,侯诚
受保护的技术使用者:苏州大学
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!