一种面向运动与感知协同康复的手部康复系统和方法
本发明涉及康复训练,尤其涉及一种面向运动与感知协同康复的手部康复系统和方法。
背景技术:
1、单侧手部功能受损是许多人面临的问题,可能是由于创伤、手术、神经系统疾病或其他原因引起的。这种情况可以导致运动障碍、力量减弱和感觉丧失,影响日常生活和工作。因此,开发手部康复系统和方法变得至关重要。
2、近年来,研究者研发了多种手部运动康复系统,但多数系统是由内置的固定程式控制,仅能带动患者患侧手执行固定模式的运动,系统适应性差,患者参与度低。而现有使用的系统,或是需要特定设备,成本较高,或是布置较复杂。
3、传统的手部康复方法包括物理治疗、药物治疗等,但这些方法通常受限于时间、地点和费用,并且进展缓慢。因此,寻求更有效、便捷和可持续的康复方法变得紧迫。随着技术的不断进步,人工智能和传感器技术等已经在康复领域发挥了重要作用。这些技术可以用于创造更丰富、有趣和个性化的康复体验,并提供实时反馈以促进康复进展。
4、经文献检索发现,中国专利公开号为cn114767464a,专利名称为:一种基于单目视觉引导的多模式手部康复系统及方法,申请日为2022年3月29日。该发明提出了一种基于单目视觉引导的多模式手部康复系统,通过该系统能够利用虚拟手模型,在屏幕上实时显示双手运动过程,通过对患者的感官刺激实现运动神经通路重建。但该系统需要人来时刻关注屏幕上手部的运动信息,不方便使用,且视觉刺激与气动手弯曲存在较大延迟,没有与手掌运动的真实感觉相结合,并没有运动的感知反馈,康复效果有限。
5、经文献检索发现,中国专利公开号为cn111449813a,专利名称为:一种用于假肢手运动姿态感觉反馈的穿戴式电刺激系统,申请日为2020年7月28日。该发明提出了一种用于假肢手运动姿态感觉反馈的穿戴式电刺激臂环。能实时将假肢手手指的运动姿态信息,包括手指掌指关节的角度和手指运动角速度,来调节电刺激的通道、幅值和频率,输出电刺激信号反馈给用户。一方面该应用是面向假肢手,而未针对手部康复系统,且假肢手不能自主控制,无法主动提供辅助运动;另一方面只能输出几种固定的电刺激参数来对应手指的运动,只是对电刺激的原始感知和运动的简单对应,并没有结合生理基础的真实手指运动的感觉。
6、总体来说,之前的手部康复系统,仅关注肢体或肌肉运动康复,未考虑运动神经通路重建,不能模拟自然手掌的运动控制和感知能力。无法做到运动与感知协同康复。因此,有必要设计一种面向运动与感知协同康复的手部康复系统和方法来满足康复患侧手的运动和感知的功能需求。
技术实现思路
1、针对现有技术的不足,本发明提供一种面向运动与感知协同康复的手部康复系统和方法,读取健康侧手的姿态和运动信息,控制软体气动手套引导患侧手运动,并读取软体气动手套各手指的弯曲度信息,依据肌梭模型,处理成对应位置和频率的电刺激来刺激皮肤进行实时感知,以解决目前的手部康复系统无法做到运动与感知协同康复的问题。
2、为解决上述技术问题,本发明技术方案如下:
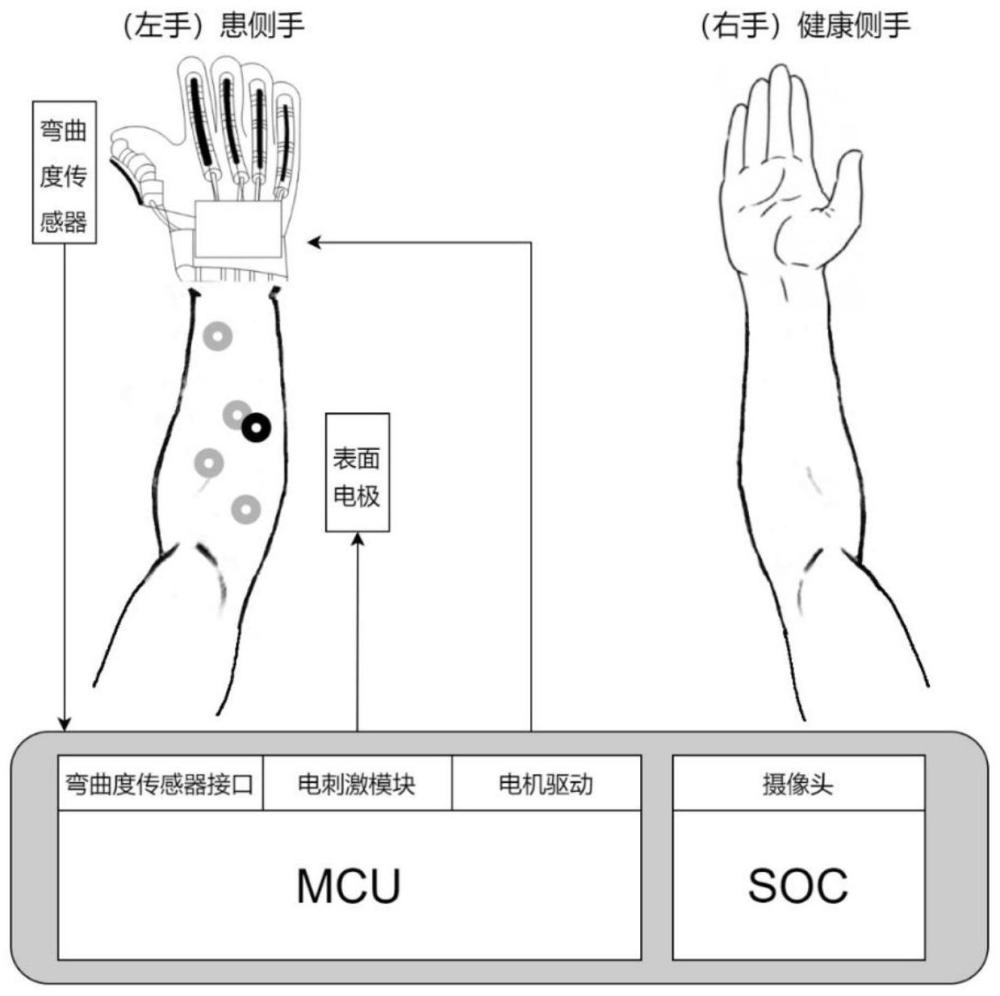
3、一方面,本发明提供一种面向运动与感知协同康复的手部康复系统,包括:总控系统板,软体气动手套,弯曲度传感器和表面电极。
4、所述总控系统板包括系统级芯片soc、微控制单元mcu、摄像头、电机驱动模块和电刺激模块;所述软体气动手套包括软体手、电机模块以及气泵;
5、所述系统级芯片soc通过csi接口或usb接口连接至摄像头;微控制单元mcu通过usb接口与系统级芯片soc连接,微控制单元mcu输出端连接电机驱动模块,所述电机驱动模块输出端连接软体气动手套的电机模块,电机模块连接至软体气动手套的气泵,气泵连接软体手,所述微控制单元mcu通过电机驱动模块间接驱动气泵;微控制单元mcu输入端通过弯曲度传感器接口连接弯曲度传感器,所述弯曲度传感器贴于软体气动手套的各个手指上,所述微控制单元mcu输出端连接电刺激模块,所述电刺激模块输出端连接所述表面电极。
6、优选地,所述弯曲度传感器为箔式电阻应变计,由所述微控制单元mcu读取数据。
7、优选地,所述电刺激模块为ens001-a全功能神经电刺激芯片。
8、优选地,所述表面电极为同心圆环电极,圆心部分连接所述电刺激模块的正极,圆环部分连接所述电刺激模块的负极。
9、本发明另一方面提供一种面向运动与感知协同康复的手部康复方法,包括以下步骤:
10、步骤1:使用者将总控系统板固定于前胸位置,并穿戴软体气动手套,在前臂粘贴各个表面电极,并将弯曲度传感器、电刺激模块和电机驱动模块接于微控制单元mcu对应接口,将表面电极连接至电刺激模块,电机模块连接至电机驱动模块;
11、步骤2:健康侧手运动,通过摄像头采集健康侧手的运动视频,系统级芯片soc接收健康侧手的运动视频并通过健康侧手姿态和运动信息解析算法处理得到健康侧手的姿态和运动信息;所述运动信息包括健康侧手各个手指的各个关节节点的弯曲角度;
12、步骤3:系统级芯片soc将所述健康侧手的姿态和运动信息传输给微控制单元mcu;
13、步骤4:微控制器单元mcu通过电机驱动模块驱动电机旋转,电机不同的旋转方向带动气泵向所述软体气动手套充气或放气,使气动手套各个手指弯曲且与所述健康侧手的姿态一致;
14、步骤5:微控制单元mcu通过弯曲度传感器读取软体气动手套各手指弯曲角度;
15、步骤6:微控制单元mcu将所述各手指弯曲角度通过手部电刺激响应算法处理为对应的电流脉冲参数,包括电流脉冲波形类型、脉冲频率、脉冲幅值和脉冲宽度;
16、步骤7:微控制器单元mcu依据电流脉冲参数,通过电刺激模块输出电流脉冲,经各个表面电极输出并刺激使用者各个手指运动的相关肌肉与神经。
17、优选地,所述健康侧手姿态和运动信息解析算法采用meidapipe hand tracking模型。
18、优选地,所述的手部电刺激响应算法采用基于肌梭模型的响应算法。
19、与现有技术相比,本发明的有益效果如下:
20、手部姿态识别健康侧手引导患侧手运动,结合肌梭感受模型的电刺激反馈传递给前臂的肌肉和神经,可以感知自然肢体的运动感觉。可以促使神经系统重新建立与肢体连接的神经路径,促进患者的神经重塑和再适应,提高患者对肢体的感知和控制能力。通过生物传感技术,系统可以提供即时反馈,帮助患者调整动作和感知,以改善康复进展。基于手部姿态识别健康侧手引导患侧手运动和电刺激感知协同康复训练,综合考虑手部的运动和感知功能,使康复更全面,更有针对性。患者可以更好地练习协调、平衡和手部精细动作。患者可以逐渐恢复受影响手部的功能,从而提高日常生活的能力,有助于预防因手部功能障碍而引起的并发症,如肌肉萎缩或关节僵硬,减少长期医疗成本。
技术特征:
1.一种面向运动与感知协同康复的手部康复系统,其特征在于,包括:总控系统板,软体气动手套,弯曲度传感器和表面电极;
2.根据权利要求1所述的一种面向运动与感知协同康复的手部康复系统,其特征在于,所述弯曲度传感器为箔式电阻应变计,由所述微控制单元mcu读取数据。
3.根据权利要求1所述的一种面向运动与感知协同康复的手部康复系统,其特征在于,所述电刺激模块为ens001-a全功能神经电刺激芯片。
4.根据权利要求1所述的一种面向运动与感知协同康复的手部康复系统,其特征在于,所述表面电极为同心圆环电极,圆心部分连接所述电刺激模块的正极,圆环部分连接所述电刺激模块的负极。
5.一种面向运动与感知协同康复的手部康复方法,基于权利要求1所述手部康复系统实现,其特征在于,包括以下步骤:
6.根据权利要求1所述的一种面向运动与感知协同康复的手部康复方法,其特征在于,所述健康侧手姿态和运动信息解析算法采用meidapipe hand tracking模型。
7.根据权利要求1所述的一种面向运动与感知协同康复的手部康复方法,其特征在于,所述手部电刺激响应算法采用基于肌梭模型的响应算法。
技术总结
本发明公开一种面向运动与感知协同康复的手部康复系统和方法,涉及康复训练技术领域。一种面向运动与感知协同康复的手部康复系统包括:总控系统板,软体气动手套,弯曲度传感器和表面电极,电刺激通过粘贴于前臂皮肤的表面电极刺激皮下组织和肌肉,由健康侧手引导患侧手运动,不同的手指运动的对应刺激通过不同位置的表面电极刺激不同位置的肌肉,以实现运动与感知协同康复。本发明的手部姿态识别健康侧手引导患侧手运动,结合肌梭感受模型的电刺激反馈传递给前臂的肌肉和神经,可以感知自然肢体的运动感觉,并促使神经系统重新建立与肢体连接的神经路径,促进患者的神经重塑和再适应,提高患者对肢体的感知和控制能力。
技术研发人员:丁其川,闫碧岑,童晨宇,王斐
受保护的技术使用者:东北大学
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!