一种腰部柔性支撑系统及其控制方法与流程
本发明属于步态训练机器人,具体涉及一种腰部柔性支撑系统及其控制方法。
背景技术:
1、步态训练机器人是一种仿真人类步态的机器人,具有复杂的机械结构和先进的控制系统,它可以通过电子和机械部件模拟人体步态,并模拟人体身体的多个动作,如走路、奔跑、跨过障碍、爬楼梯等。
2、步态训练机器人可用于下肢康复,对于下肢肌肉无力、骨折、脑卒中等患者的康复有非常大的帮助。步态训练机器人通常搭配虚拟现实技术,使患者能够在进行康复训练时获得更好的模拟效果。在治疗期间,步态训练机器人可以检测患者的运动状态,记录患者的运动数据,并帮助患者恢复正常步态。康复期结束后,步态训练机器人还可以辅助患者进行正常的步态运动训练。
3、通过步态训练机器人的训练,患者可以恢复正常的步态,提高身体平衡性,增强下肢肌力和肌肉控制能力,以及纠正步态异常。步态训练机器人的使用针对不同的病情和训练目的,可以制定定制化的康复方案,帮助患者快速恢复到健康的状态。
4、现有的步态训练机器人只能通过固定患者的腰部来进行步态训练,这样会导致患者的走路姿态不自然,髋关节的运动受到限制,无法实现正常走路的步态。同时,因为腰部处于固定状态,患者的腰部力量得不到训练,髋关节也得不到足够有效的活动,影响了患者的身体康复效果。因此,需要寻找更好的步态训练机器人设计,使得患者能够更加自然地进行步态训练,同时能够对髋关节和腰部进行有效的训练和活动。
技术实现思路
1、为了解决上述问题,本发明提供了一种腰部柔性支撑系统,它通过使用柔性的髋关节活动装置,使患者进行步态训练时髋关节可以得到一定的活动训练,促进患者的康复。同时,步态训练结合了腰部力量恢复训练,增强了患者的腰部肌肉力量,从而提高了患者的运动能力和稳定性。在走路时,系统会根据患者的姿态和步伐变化,自动调整髋关节活动装置的运动,使患者的步态更加自然、舒适、稳定。该技术效果使得患者能够更快地恢复正常运动能力,提高生活质量。
2、一种腰部柔性支撑系统,它包括机架、腰托和控制系统,所述的机架上设置有用于跟随和/或带动腰部进行水平和/或竖直摆动的腰部竖直移动柔性支撑装置和腰部摆动支撑装置;所述的腰部竖直移动柔性支撑装置包括设置在机架上的浮动支臂,腰部摆动支撑装置设置在浮动支臂端部的浮动架上,由浮动支臂带动进行上下浮动;所述的腰部摆动支撑装置包括水平移动装置和铰接在水平移动装置上的摆动支臂;水平移动装置驱动摆动支臂左右移动的同时,摆动辊子由摆动凸轮驱动进行左右旋转摆动;所述的控制系统用于控制腰部摆动支撑装置的运动,控制系统与腰托旋转角度控制系统、腰托旋转阻力检测系统相互通信连接;所述的腰托旋转角度控制系统包括移动位置检测装置、旋转角度检测装置;所述的腰托旋转阻力检测系统包括设置在腰托上的腰托垫、检测腰托垫与腰托之间的力矩差值的阻力检测装置;
3、进一步的,所述的浮动支臂包括两个平行设置的第一支臂和第二支臂,第一支臂和第二支臂的一端铰接在机架上,另一端铰接分别安装在浮动架上;所述的机架上还设有用于控制浮动架竖直动态浮动的阻尼装置;所述的阻尼装置一端铰接安装在机架上,另一端连接在第一支臂的延长支臂的端部;
4、进一步的,所述的水平移动装置包括由驱动电机驱动滑台,摆动支臂经立轴铰接安装在滑台上;腰托固定安装在摆动支臂上,所述的水平移动装置的滑台带动腰托左右移动,所述的摆动支臂上的摆动辊子与设置在浮动架上的摆动凸轮配合;
5、进一步的,所述的摆动辊子铰接安装在摆动支臂的后部,位于立轴的两侧;所述的摆动凸轮的两端设置有凸轮的最高点,中部设置有最低点,最高点和最低点之间为平面连接;
6、进一步的,所述的移动位置检测装置设置在水平移动装置上;所述的移动装置为设置在驱动电机上的旋转编码器;所述的旋转角度检测装置设置在立轴上,与立轴同轴安装;
7、进一步的,所述的腰托旋转阻力检测系统包括设置在腰托上的腰托垫、阻力检测装置、滑动托板;所述的阻力检测装置设置在腰托的后侧面,滑动托板经滑动块与阻力检测装置接触;所述的腰托垫设置在腰托的后侧面,与滑动托板固定;
8、进一步的,一种腰部柔性支撑系统的控制方法,它包括如下步骤:
9、s01:初步设定腰托旋转角度;
10、s02:设定腰托旋转力的安全范围;
11、s03:检测使用者的步态情况,控制移动装置移动旋转腰托;
12、s04:检测腰托旋转力是否在安全范围,若未超出执行s05,若超出执行s06;
13、s05:继续旋转腰托,达到的设定腰托旋转角度后,反向旋转腰托,重复执行s03;
14、s06:记录此时的腰托旋转角度,记录腿部辅助装置的位置参数,反向旋转腰托,重复执行s03;
15、s07:步态训练结束;
16、进一步的,所述的s01步骤中腰托的旋转角度范围为-10~10度;所述的s02步骤中的旋转力的安全范围为使用者的体重的3%-10%;
17、进一步的,所述的s03步骤中包括如下步骤:
18、s031:检测并提取大腿关节运动装置的运动角度x;
19、s032:根据使用者的关节灵活度,设定关节活动系数k;
20、s033:计算得出髋关节旋转角度y=k×x×x;
21、s034:控制移动装置移动旋转腰托,旋转角度区间为-y~y;
22、进一步的,所述的大腿关节的运动角度x的设定条件为:将使用者的左侧大腿向前弯曲设定为x的正值方向,反向弯曲设定为x的负值方向;所述的髋关节旋转角度y的设定条件为:将使用者的髋关节向左侧大腿方向旋转设定为y的正值方向,反向旋转设定为y的负值方向;
23、进一步的,所述的s03步骤中的关节活动系数k的范围为0~0.016,关节活动系数由小增大代表其髋关节关节活动度逐渐增大;
24、进一步的,所述的s04步骤中通过腰托旋转阻力检测系统的阻力检测装置对腰托旋转力进行实时检测,并将检测到的旋转阻力的值与设定值进行实时比较;
25、进一步的,所述的s06步骤中记录下的腰托旋转角度和腿部辅助装置的位置参数,其中记录下的腰托旋转角度为下次运动时的最大腰托旋转角度。
26、本发明公开了一种腰部柔性支撑系统,它包括机架、腰托和控制系统,机架上设置有用于跟随和/或带动腰部进行水平和/或竖直摆动的腰部竖直移动柔性支撑装置和腰部摆动支撑装置;腰部竖直移动柔性支撑装置包括设置在机架上的浮动支臂,腰部摆动支撑装置设置在浮动支臂端部的浮动架上,由浮动支臂带动进行上下浮动;腰部摆动支撑装置包括水平移动装置和铰接在水平移动装置上的摆动支臂;水平移动装置驱动摆动支臂左右移动的同时,摆动辊子由摆动凸轮驱动进行左右旋转摆动;控制系统用于控制腰部摆动支撑装置的运动;还提供了一种腰部柔性支撑系统的控制方法。本设计可以在步态训练的同时能够对髋关节和腰部进行有效的训练和活动。
技术特征:
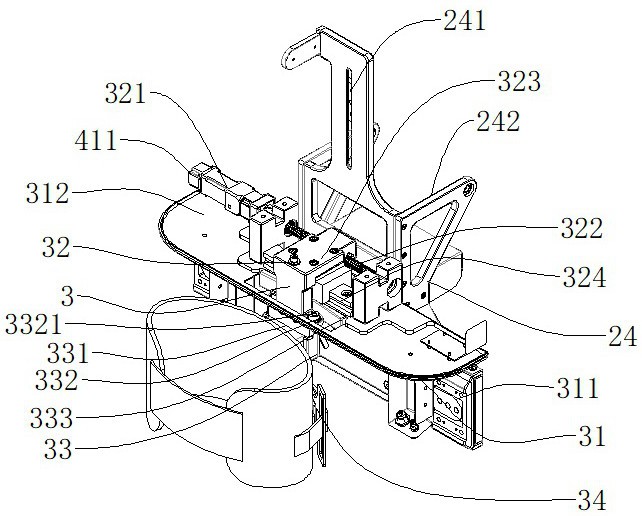
1.一种腰部柔性支撑系统,其特征在于:它包括机架(1)、腰托(34)和控制系统,所述的机架(1)上设置有用于跟随和/或带动腰部进行水平和/或竖直摆动的腰部竖直移动柔性支撑装置(2)和腰部摆动支撑装置(3);所述的腰部竖直移动柔性支撑装置(2)包括设置在机架(1)上的浮动支臂,腰部摆动支撑装置(3)设置在浮动支臂端部的浮动架(24)上,由浮动支臂带动进行上下浮动;所述的腰部摆动支撑装置(3)包括水平移动装置(32)和铰接在水平移动装置(32)上的摆动支臂(331);水平移动装置(32)驱动摆动支臂(331)左右移动的同时,摆动辊子(332)由摆动凸轮(333)驱动进行左右旋转摆动;所述的控制系统(4)用于控制腰部摆动支撑装置(3)的运动,控制系统(4)与腰托旋转角度控制系统(41)、腰托旋转阻力检测系统(42)相互通信连接;所述的腰托旋转角度控制系统(41)包括移动位置检测装置(411)、旋转角度检测装置(412);所述的腰托旋转阻力检测系统(42)包括设置在腰托(34)上的腰托垫(421)、检测腰托垫(421)与腰托(34)之间的力矩差值的阻力检测装置(422)。
2.根据权利要求1所述的一种腰部柔性支撑系统,其特征在于:所述的浮动支臂包括两个平行设置的第一支臂(22)和第二支臂(23),第一支臂(22)和第二支臂(23)的一端铰接在机架(1)上,另一端分别铰接安装在浮动架(24)上;所述的机架(1)上还设有用于控制浮动架(24)竖直动态浮动的阻尼装置(25);所述的阻尼装置(25)一端铰接安装在机架(1)上,另一端连接在第一支臂(22)的延长支臂的端部。
3.根据权利要求2所述的一种腰部柔性支撑系统,其特征在于:所述的水平移动装置(32)包括由驱动电机(321)驱动滑台(323),摆动支臂(331)经立轴(3231)铰接安装在滑台(323)上;腰托(34)固定安装在摆动支臂(331)上,所述的水平移动装置(32)的滑台(323)带动腰托(34)左右移动,所述的摆动支臂(331)上的摆动辊子(332)与设置在浮动架(24)上的摆动凸轮(333)配合。
4.根据权利要求3所述的一种腰部柔性支撑系统,其特征在于:所述的摆动辊子(332)铰接安装在摆动支臂(331)的后部,位于立轴(3231)的两侧;所述的摆动凸轮(333)的两端设置有凸轮的最高点,中部设置有最低点,最高点和最低点之间为平面连接。
5.根据权利要求1或4所述的一种腰部柔性支撑系统,其特征在于:所述的移动位置检测装置(411)设置在水平移动装置(32)上;所述的移动装置(411)为设置在驱动电机(321)上的旋转编码器;所述的旋转角度检测装置(412)设置在立轴(3231)上,与立轴(3231)同轴安装。
6.根据权利要求5所述的一种腰部柔性支撑系统,其特征在于:所述的腰托旋转阻力检测系统(42)包括设置在腰托(34)上的腰托垫(421)、阻力检测装置(422)、滑动托板(423);所述的阻力检测装置(422)设置在腰托(34)的后侧面,滑动托板(423)经滑动块(4222)与阻力检测装置(422)接触;所述的腰托垫(421)设置在腰托(34)的后侧,与滑动托板(423)固定。
7.根据权利要求6所述的一种腰部柔性支撑系统的控制方法,其特征在于:它包括如下步骤:
8.根据权利要求7所述的一种腰部柔性支撑系统的控制方法,其特征在于:所述的s01步骤中腰托(34)的旋转角度范围为-10~10度;所述的s02步骤中的旋转力的安全范围为使用者的体重的3%-10%。
9.根据权利要求8所述的一种腰部柔性支撑系统的控制方法,其特征在于:所述的s03步骤中包括如下步骤:
10.根据权利要求9所述的一种腰部柔性支撑系统的控制方法,其特征在于:所述的大腿关节的运动角度x的设定条件为:将使用者的左侧大腿向前弯曲设定为x的正值方向,反向弯曲设定为x的负值方向;所述的髋关节旋转角度y的设定条件为:将使用者的髋关节向左侧大腿方向旋转设定为y的正值方向,反向旋转设定为y的负值方向。
11.根据权利要求10所述的一种腰部柔性支撑系统的控制方法,其特征在于:所述的s03步骤中的关节活动系数k的范围为0~0.016,关节活动系数由小增大代表其髋关节关节活动度逐渐增大。
12.根据权利要求11所述的一种腰部柔性支撑系统的控制方法,其特征在于:所述的s04步骤中通过腰托(34)旋转阻力检测系统(42)的阻力检测装置(422)对腰托(34)旋转力进行实时检测,并将检测到的旋转阻力的值与设定值进行实时比较。
13.根据权利要求12所述的一种腰部柔性支撑系统的控制方法,其特征在于:所述的s06步骤中记录下的腰托(34)旋转角度和腿部辅助装置(35)的位置参数,其中记录下的腰托(34)旋转角度为下次运动时的最大腰托(34)旋转角度。
技术总结
本发明公开了一种腰部柔性支撑系统,它包括机架、腰托和控制系统,机架上设置有用于跟随和/或带动腰部进行水平和/或竖直摆动的腰部竖直移动柔性支撑装置和腰部摆动支撑装置;腰部竖直移动柔性支撑装置包括设置在机架上的浮动支臂,腰部摆动支撑装置设置在浮动支臂端部的浮动架上,由浮动支臂带动进行上下浮动;腰部摆动支撑装置包括水平移动装置和铰接在水平移动装置上的摆动支臂;水平移动装置驱动摆动支臂左右移动的同时,摆动辊子由摆动凸轮驱动进行左右旋转摆动;控制系统用于控制腰部摆动支撑装置的运动;还提供了一种腰部柔性支撑系统的控制方法。本设计可以在步态训练的同时能够对髋关节和腰部进行有效的训练和活动。
技术研发人员:李林,张国忠,陈卓强,吉世鸿,葛春雨,杨志荣
受保护的技术使用者:橙象医疗科技(广州)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!