一种辅助轮椅系统
本发明属于医疗康复机器人,尤其涉及一种辅助轮椅系统。
背景技术:
1、辅助轮椅是一种重要的器具。中国专利申请号03126318.6、中国专利申请号201911240688.x采用大小轮配合,实现轮椅对台阶、障碍物的越障,但是其高度受轮子大小的限制。中国专利申请号202020519153.8、中国专利申请号202111104202.7采用机构组合的方式提高了越障的高度,但是越障高度有限。同时轮椅还存在功能单一、姿态调整范围有限,运动范围与灵活度有限的诸多问题,有必要设计一款新的辅助轮椅系统。
技术实现思路
1、本发明实施例的目的在于提供一种辅助轮椅系统,旨在解决上述背景技术提到的问题,具有功能多样,姿态调整范围大、运动灵活等优点。
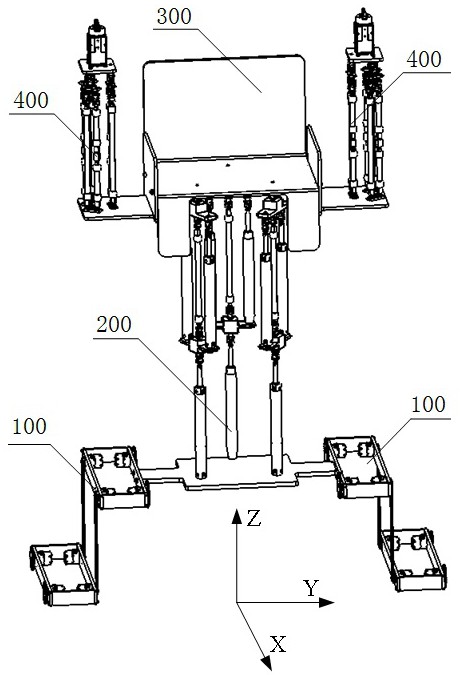
2、本发明实施例是这样实现的,一种辅助轮椅系统,所述辅助轮椅系统包括座椅系统、姿态调整系统和底盘运动系统;
3、两个所述底盘运动系统分别设置在所述姿态调整系统的底部两侧,所述座椅系统设置在所述姿态调整系统的顶部,两个所述底盘运动系统单独或协同运动时,可以带动所述姿态调整系统及座椅系统运动和越障,所述姿态调整系统用于调整所述座椅系统的姿态;
4、其中一个所述底盘运动系统包括底盘模块一、底盘模块二、摆动杆一、摆动杆二,所述底盘模块二通过下侧板设置在所述姿态调整系统的底部一侧,所述底盘模块一通过所述摆动杆一、所述摆动杆二连接在所述底盘模块二远离所述下侧板的一侧,构成四连杆结构,该四连杆结构的变形受所述底盘模块一、底盘模块二的驱使。
5、优选地,所述底盘模块一包括:框架二、设置在框架二内的电机三、电机四、电机七、电机八,电机三、电机七的转动轴分别与摆动杆一、摆动杆二固定连接,电机四、电机八的转动轴分别与麦克纳姆轮一、麦克纳姆轮二固定连接;
6、所述底盘模块二包括:框架一、设置在框架一内的电机一、电机二、电机五、电机六,电机二、电机六的转动轴分别与摆动杆一、摆动杆二固定连接,电机一、电机五的转动轴分别与麦克纳姆轮三、麦克纳姆轮四固定连接。
7、优选地,所述姿态调整系统包括至少两个姿态调整支路,至少两个所述姿态调整支路规则排列。
8、优选地,所述姿态调整系统包括三个姿态调整支路,三个姿态调整支路分别是:在圆周上均匀分布的结构相同的姿态调整支路一、姿态调整支路二、姿态调整支路三;
9、其中所述姿态调整支路一包括末端件一、末端件二、气缸三,以及线性排列在所述末端件一与末端件二之间的气缸一、气动肌肉一、气缸二,所述气缸一、气动肌肉一、气缸二与所述末端件一之间设置为可转动连接,气缸三的伸缩杆可转动连接末端件二。
10、优选地,所述座椅系统至少包括具有坐垫和靠背的座椅。
11、优选地,所述辅助轮椅系统还包括辅助系统,两个所述辅助系统分别设置在所述座椅系统的两侧。
12、优选地,所述辅助系统包括:侧面板、末端件三和气动肌肉肌群;
13、所述侧面板设置在所述座椅系统的其中一侧,三个所述气动肌肉肌群呈圆周分布的设置在所述侧面板上,所述末端件三设置在所述气动肌肉肌群远离侧面板的一端,所述气动肌肉肌群与末端件三之间可转动连接,所述末端件三上设置有气爪。
14、优选地,所述气动肌肉肌群包括末端件四、末端件五、气动肌肉二、气动肌肉三、气动肌肉四,所述气动肌肉三、气动肌肉四通过中间连接件串联,并与气动肌肉二并联设置在所述末端件四与末端件五之间,所述气动肌肉三与末端件四之间可转动连接,气动肌肉二与末端件四之间可转动连接;这种可转动连接可被配置为万向节。
15、优选地,为保证辅助轮椅系统安装螺纹的耐磨性与强度,末端件一、末端件二、末端件三、末端件四、末端件五的材料选择黄铜;为了减轻辅助轮椅系统的重量,座椅系统、侧面板的材料选择塑料,采用注塑成型技术加工而成。
16、优选地,所述辅助轮椅系统还包括控制模块,该控制模块用于控制所述姿态调整系统和底盘运动系统。
17、优选地,所述控制模块连接有拉线式编码器,该拉线式编码器用于监测各气动肌肉的位移变化,所述拉线式编码器选择dx-025拉线式编码器,其自身重量比较轻,在位移控制过程中对元器件影响较小。
18、本发明实施例提供的一种辅助轮椅系统,相比现有技术,在底盘运动系统中,底盘模块的电机带动麦克纳姆轮可实现横向、纵向运动,电机带动摆动杆可实现越障功能;三个姿态调整支路可以根据使用者的需要,实时的调整座椅的姿态;利用气动肌肉的特点,具有功能多样,姿态调整范围大、运动灵活的特点,多个底盘模块组合可实现各种高度障碍物的越障,可用于助老助残和医疗助力。
技术特征:
1.一种辅助轮椅系统,其特征在于,所述辅助轮椅系统包括座椅系统、姿态调整系统和底盘运动系统;
2.根据权利要求1所述的辅助轮椅系统,其特征在于,所述底盘模块一包括:框架二、设置在框架二内的电机三、电机四、电机七、电机八,电机三、电机七的转动轴分别与摆动杆一、摆动杆二固定连接,电机四、电机八的转动轴分别与麦克纳姆轮一、麦克纳姆轮二固定连接;
3.根据权利要求1所述的辅助轮椅系统,其特征在于,所述姿态调整系统包括至少两个姿态调整支路,至少两个所述姿态调整支路规则排列。
4.根据权利要求3所述的辅助轮椅系统,其特征在于,所述姿态调整系统包括三个姿态调整支路,三个姿态调整支路分别是:在圆周上均匀分布的结构相同的姿态调整支路一、姿态调整支路二、姿态调整支路三;
5.根据权利要求1所述的辅助轮椅系统,其特征在于,所述座椅系统至少包括具有坐垫和靠背的座椅。
6.根据权利要求1所述的辅助轮椅系统,其特征在于,所述辅助轮椅系统还包括辅助系统,两个所述辅助系统分别设置在所述座椅系统的两侧。
7.根据权利要求6所述的辅助轮椅系统,其特征在于,所述辅助系统包括:侧面板、末端件三和气动肌肉肌群;
8.根据权利要求7所述的辅助轮椅系统,其特征在于,所述气动肌肉肌群包括末端件四、末端件五、气动肌肉二、气动肌肉三、气动肌肉四,所述气动肌肉三、气动肌肉四通过中间连接件串联,并与气动肌肉二并联设置在所述末端件四与末端件五之间,所述气动肌肉三与末端件四之间可转动连接,气动肌肉二与末端件四之间可转动连接。
9.根据权利要求1-8任一所述的辅助轮椅系统,其特征在于,所述辅助轮椅系统还包括控制模块,该控制模块用于控制所述姿态调整系统和底盘运动系统。
技术总结
本发明适用于医疗康复机器人技术领域,提供了一种辅助轮椅系统,所述辅助轮椅系统包括座椅系统、姿态调整系统和底盘运动系统;两个所述底盘运动系统分别设置在所述姿态调整系统的底部两侧,所述座椅系统设置在所述姿态调整系统的顶部,两个所述底盘运动系统单独或协同运动时,可以带动所述姿态调整系统及座椅系统运动和越障,所述姿态调整系统用于调整所述座椅系统的姿态;本发明的底盘运动系统中,电机带动麦克纳姆轮可实现横向、纵向运动,电机带动摆动杆可实现越障功能;三个姿态调整支路可以根据使用者的需要,实时的调整座椅的姿态;利用气动肌肉的特点,具有功能多样,姿态调整范围大、运动灵活的特点,可用于助老助残和医疗助力。
技术研发人员:王志坚,姜飞龙,沈忠飞,朱海滨,吕勇,张海军,刘睿莹,徐俊娜,林培杰,郑忠华
受保护的技术使用者:嘉兴学院
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!