一种脊柱形态与节段硬度测量系统
本发明涉及医疗器械,尤其是涉及一种脊柱形态与节段硬度测量系统。
背景技术:
1、脊柱畸形不仅影响人体的外观和姿势,还可能导致脊柱各节段僵硬程度改变进而影响脊柱的功能和稳定性。脊柱各节段僵硬程度是指脊柱在受到外力作用时各节段的变形程度和恢复能力,反映了脊柱的灵活性和稳定性。正常情况下,脊柱各节段僵硬程度应该保持一定的平衡,以适应人体的各种姿势和运动。但是脊柱发生畸形时,脊柱各节段僵硬程度也会发生变化。当脊柱侧弯会导致脊柱在冠状位上的活动范围减小,使得患者难以进行左右旋转等动作。同时,由于脊柱侧弯会造成椎体、椎间盘、韧带、肌肉等结构的不对称受力,导致这些结构的退变或损伤,进一步加剧了脊柱的僵硬程度。当脊柱后凸会导致脊柱在矢状位上的活动范围减小,使得患者难以进行前屈、后伸等动作。同时,由于脊柱后凸会造成胸廓的变形,影响心肺功能,导致呼吸困难、胸闷等症状,进一步加剧了脊柱的僵硬程度。临床医师通过前后方向或后前方向使用手动被动活动椎体来测量腰痛患者的脊椎硬度。脊柱僵硬是脊柱疼痛的诱因之一,在临床决策和有效治疗中发挥着重要作用,然而,这是一种主观评估,重复测量的可靠性相对较低。急需研发一个评估工具,通过测量脊柱在各个水平上的力反馈和位移来获得定量结果。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种脊柱形态与节段硬度测量系统,能够既能实时测量和显示脊柱形态又能同步采集脊柱各节段僵硬程度,让医生可以通过非x线方法得出患者的脊柱cobb角和各节段僵硬程度。
2、本发明的目的可以通过以下技术方案来实现:
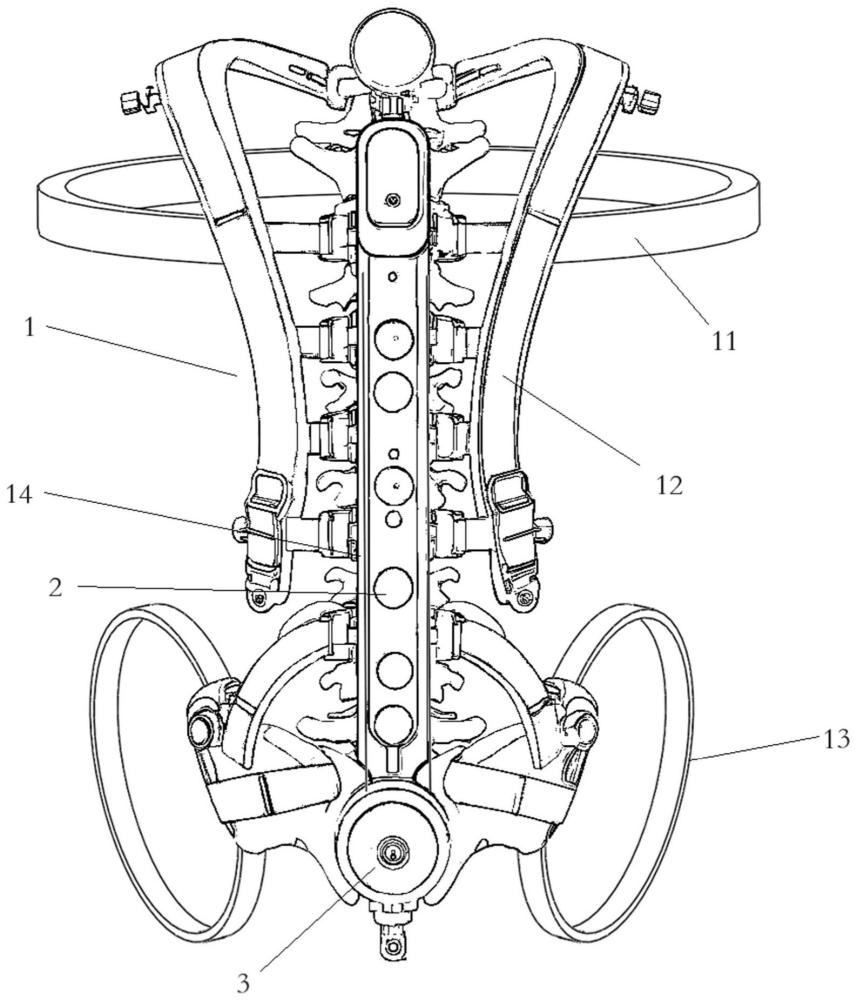
3、本发明提供一种脊柱形态与节段硬度测量系统,包括穿戴主体、至少1个传感器模组、控制器,其中具体地:
4、穿戴主体用于用户的穿戴;
5、至少1个传感器模组设于所述穿戴主体上的脊柱对应区域,所述传感器模组包括六轴传感器和压力传感器,所述六轴传感器用于获取待测位置脊柱的加速度和角速度,所述压力传感器用于获取待测位置脊柱与穿戴主体之间的接触压力;
6、控制器与所述传感器模组通信连接,所述控制器基于所述加速度和角速度计算得到脊柱的形态数据,同时所述控制器基于所述接触压力获取脊柱的硬度参数。
7、进一步地,所述穿戴主体包括与脊柱方向匹配的竖向测量部。
8、进一步地,所述穿戴主体还包括均与所述竖向测量部连接的:胸部固定带、肩部固定带、胯部固定带。
9、进一步地,所述竖向测量部上设有滑轨,所述传感器模组设于所述滑轨上,并能沿所述滑轨进行直线位移。
10、进一步地,所述滑轨为可伸缩式滑轨。
11、进一步地,所述滑轨滑轨包括相互滑动连接的滑轨a、滑轨b,还包括能够沿滑轨a、滑轨b滑动的滑块,所述滑块通过弹性凸起能够与滑轨a和滑轨b滑动接触限位,所述传感器模组固定于所述滑块上。
12、进一步地,所述传感器模组设有多个,且固定于所述竖向测量部上。
13、进一步地,所述控制器为单片机或x86架构、arm架构、risc-v架构处理器中的一种。
14、进一步地,所述控制器上匹配设有第一无线信号收发器。
15、进一步地,所述传感器模组上设有第二无线信号收发器,所述第二无线信号收发器与所述第一无线信号收发器无线通信连接,所述第二无线信号收发器分别与所述六轴传感器和压力传感器连接。
16、现有技术相比,本发明具有以下技术优势:
17、(1)设计了一种基于六轴传感器和压力传感器的脊柱形态与节段硬度测量仪,能够同时测量脊柱的形态和硬度,为脊柱疾病的诊断和治疗提供更多的信息和依据。
18、(2)相比于传统的x线片、ct、mri等测量方法,本发明中的测量仪无需复杂的准备和操作,无需使用有害的射线或磁场,价格低廉经济负担轻,可以根据不同的身材和尺寸定制背部支架,可以在不同的场合和环境下使用,可以测量脊柱的多种参数。
技术特征:
1.一种脊柱形态与节段硬度测量系统,其特征在于,包括:
2.根据权利要求1所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述穿戴主体(1)包括与脊柱方向匹配的竖向测量部(14)。
3.根据权利要求2所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述穿戴主体(1)还包括均与所述竖向测量部(14)连接的:胸部固定带(11)、肩部固定带(12)、胯部固定带(13)。
4.根据权利要求3所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述竖向测量部(14)上设有滑轨,所述传感器模组(2)设于所述滑轨上,并能沿所述滑轨进行直线位移。
5.根据权利要求4所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述滑轨为可伸缩式滑轨。
6.根据权利要求5所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述滑轨滑轨包括相互滑动连接的滑轨a(4)、滑轨b(5),还包括能够沿滑轨a(4)、滑轨b(5)滑动的滑块(6),所述滑块(6)通过弹性凸起(7)能够与滑轨a(4)和滑轨b(5)滑动接触限位,所述传感器模组(2)固定于所述滑块(6)上。
7.根据权利要求2所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述传感器模组(2)设有多个,且固定于所述竖向测量部(14)上。
8.根据权利要求1所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述控制器(3)为单片机或x86架构、arm架构、risc-v架构处理器中的一种。
9.根据权利要求1所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述控制器(3)上匹配设有第一无线信号收发器。
10.根据权利要求9所述的一种脊柱形态与节段硬度测量系统,其特征在于,所述传感器模组(2)上设有第二无线信号收发器,所述第二无线信号收发器与所述第一无线信号收发器无线通信连接,所述第二无线信号收发器分别与所述六轴传感器和压力传感器连接。
技术总结
本发明涉及一种脊柱形态与节段硬度测量系统,包括穿戴主体、至少1个传感器模组、控制器,穿戴主体用于用户的穿戴;至少1个传感器模组设于所述穿戴主体上的脊柱对应区域,传感器模组包括六轴传感器和压力传感器,六轴传感器用于获取待测位置脊柱的加速度和角速度,压力传感器用于获取待测位置脊柱与穿戴主体之间的接触压力;控制器与传感器模组通信连接,控制器基于加速度和角速度计算得到脊柱的形态数据,同时控制器基于接触压力获取脊柱的硬度参数。与现有技术相比,本发明能够既能实时测量和显示脊柱形态又能同步采集脊柱各节段僵硬程度,让医生可以通过非X线方法得出患者的脊柱Cobb角和各节段僵硬程度。
技术研发人员:叶济灵,程荣山,蔡斌,蔡宗远
受保护的技术使用者:上海交通大学医学院附属第九人民医院
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!