用于促进口腔卫生的口腔护理系统和方法与流程
用于促进口腔卫生的口腔护理系统和方法
1.相关申请的交叉引用
2.本技术要求2020年6月22日提交的第63/042,074号美国临时专利申请、2020年6月22日提交的第63/042,083号美国临时专利申请、2020年6月22日提交的第63/042,093号美国临时专利申请、2020年6月22日提交的第63/042,099号美国临时专利申请以及2020年9月30日提交的第63/085,426号美国临时专利申请的权益,每件美国临时专利申请以全文引用的方式并入本文中。
背景技术:
3.在全以改进用户的口腔护理程序为目标的情况下通过并入运动传感器和内部相机并通过与外部相机、智能手机和应用程序集成,牙刷已转变成高科技设备。运动传感器可帮助跟踪刷洗程序,相机可在程序期间获取口腔的图像或视频,并且智能手机可帮助向用户提供反馈以改进程序。最近,牙刷中已并入技术以便标识用户牙齿上的斑块堆积区域和牙龈萎缩的早期迹象,目的都是为了帮助用户更好地聚焦于其口腔护理程序或使得用户能够与其牙科专业人员分享信息。
4.虽然这些进步非常有用,但它们也被证明有局限性。一个特定限制是,跟踪牙刷在口腔内的位置和自由移动是非常复杂的问题。解决方案通常包含在整个预定程序中引导用户,由此降低跟踪牙刷在口腔内的位置和运动的复杂性。尽管人工智能和深度机器学习已应用于这个复杂的问题,但当今存在的位置和运动跟踪能力仍留有充分的改进空间。
5.另一限制是关于图像和视频捕捉。对于嵌入牙刷中的相机,捕捉的图像和视频在很大程度上受到牙膏泡沫、唾液、光圈雾化和物镜散焦的阻碍。在图像和视频的目标是牙齿和牙龈的情况下,这些阻碍只会将噪声引入到所采集的图像和视频数据中。另外,由于推荐的刷洗周期长为两分钟,因此所得图像集或视频往往是大约5gb的大数据集,并且噪声数据对于经验不足的用户来说难以独立查看,对于时间可能极其宝贵的牙科专业人员来说更是如此。噪声图像和视频数据的传统图像或视频分析也体现出非常复杂的问题,因此,需要新技术来帮助简化此问题。此外,这个问题的解决方案自然有助于引领口腔护理领域的其它进步。
技术实现要素:
6.根据本公开的示例性实施例涉及用于通过使用深度机器学习神经网络促进口腔卫生的口腔护理系统和方法。此类机器学习技术提供能够通过对训练数据的分析来学习识别模式的优点。这些机器学习技术可由口腔护理系统和方法有利地采用,所述口腔护理系统和方法用于通过分析口腔护理装置在口中的位置、用户嘴外部图像以及与用户的口腔健康和/或刷洗有效性有关的数据中的一者或多者来促进口腔卫生。此类分析可有利地用于更准确地确定口腔护理装置的参考面在口腔内的位置和定向,控制电动口腔护理装置以增加刷洗程序的有效性,向用户提供关于口腔护理的反馈,以及向用户提供关于作为口腔护理装置的一部分包含的牙齿清洁元件的磨损状态的反馈。
7.在第一方面,本发明可以是一种口腔护理系统,其包含:具有参考面的头部;多个传感器,其被配置成生成传感器数据,所述传感器数据包含分别对应于所述参考面在自由式口腔护理程序期间的运动测量值和定向测量值的运动数据和定向数据;以及至少一个可编程处理器,其以可通信方式耦合到所述多个传感器,所述至少一个可编程处理器被配置成:从所述传感器数据生成变换后的传感器数据,所述变换后的传感器数据包含被变换成以角定向系统表示的所述定向数据和所述运动数据;并且在所述自由式口腔护理程序期间使用所述变换后的传感器数据确定所述参考面相对于口腔的位置和定向。
8.在第二方面,本发明可以是一种用于促进口腔卫生的方法,所述方法包含:在自由式口腔护理程序期间从口腔护理装置生成传感器数据,所述口腔护理装置包含具有参考面的头部和多个传感器,所述多个传感器被配置成生成所述传感器数据,其中所述传感器数据包含分别对应于所述参考面在所述自由式口腔护理程序期间的运动测量值和定向测量值的运动数据和定向数据;使用至少一个可编程处理器从所述传感器数据生成变换后的传感器数据,所述变换后的传感器数据包含被变换成以角定向系统表示的所述定向数据和所述运动数据;以及使用所述至少一个可编程处理器在所述自由式口腔护理程序期间使用所述变换后的传感器数据确定所述头部相对于口腔的位置和定向。
9.在第三方面,本发明可以是一种口腔护理系统,其包含:口腔护理装置,所述口腔护理装置包含头部、从所述头部延伸的至少一个牙齿清洁元件、耦合到所述头部以引发所述头部中的振动的振动电机,和多个传感器,所述多个传感器被配置成在自由式刷洗程序期间生成传感器数据;以及至少一个可编程处理器,所述至少一个可编程处理器以可通信方式耦合到所述多个传感器以接收所述传感器数据,所述至少一个可编程处理器被配置成在自由式刷洗程序期间响应于接收到的传感器数据而控制所述振动电机的行程频率。
10.在第四方面,本发明可以是一种用于促进口腔卫生的方法,所述方法包含:在自由式刷洗程序期间从口腔护理装置中的多个传感器生成传感器数据,所述口腔护理装置包含头部、从所述头部延伸的至少一个牙齿清洁元件、耦合到所述头部以引发所述头部中的振动的振动电机,和所述多个传感器;以及使用至少一个可编程处理器在所述自由式刷洗程序期间响应于所述传感器数据而控制所述振动电机的行程频率。
11.在第五方面,本发明可以是一种口腔护理系统,其包含:口腔护理装置,所述口腔护理装置包含头部、从所述头部延伸的至少一个牙齿清洁元件,和多个传感器,所述多个传感器被配置成在自由式刷洗程序期间生成传感器数据;以及至少一个可编程处理器,其以可通信方式耦合到所述多个传感器,所述至少一个可编程处理器被配置成:使用所述传感器数据结合刷洗程序数据来评估一个或多个口腔护理特性,所述刷洗程序数据来自于对在训练刷洗程序期间生成的传感器数据的分析;并且为所述一个或多个口腔护理特性分配口腔护理得分。
12.在第六方面,本发明可以是一种用于促进口腔卫生的方法,所述方法包含:在自由式刷洗程序期间从口腔护理装置中的多个传感器生成传感器数据,所述口腔护理装置包含头部、从所述头部延伸的至少一个牙齿清洁元件,和所述多个传感器;使用至少一个可编程处理器使用所述传感器数据结合刷洗程序数据来评估一个或多个口腔护理特性,所述刷洗程序数据来自于对在训练刷洗程序期间生成的传感器数据的分析;以及使用所述至少一个可编程处理器为所述一个或多个口腔护理特性分配口腔护理得分。
13.在第七方面,本发明可以是一种口腔护理系统,其包含:口腔护理装置,其包含主体、可拆卸地耦合到所述主体的头部、从所述头部延伸的多个牙齿清洁元件和图像传感器,所述图像传感器耦合到所述主体并且定位成从所述多个牙齿清洁元件的图像生成图像数据;以及至少一个可编程处理器,其以可通信方式耦合到所述图像传感器,所述至少一个可编程处理器被配置成:结合清洁元件磨损数据评估所述图像数据以确定所述多个牙齿清洁元件的磨损量,所述清洁元件磨损数据产生于对数据训练程序期间生成的训练图像数据的分析;并且基于评估的图像数据为所述多个牙齿清洁元件分配磨损得分。
14.在第八方面,本发明可以是一种用于促进口腔卫生的方法,所述方法包含:使用图像传感器根据从口腔护理装置的头部延伸的多个牙齿清洁元件的图像生成图像数据,所述图像传感器耦合到所述口腔护理装置的主体;使用至少一个可编程处理器结合清洁元件磨损数据来评估所述图像数据,以确定多个牙齿清洁元件上的磨损量,所述清洁元件磨损数据产生于对数据训练程序期间生成的训练图像数据的分析;以及使用所述至少一个可编程处理器基于评估的图像数据为所述多个牙齿清洁元件分配磨损得分。
15.在第九方面,本发明可以是一种口腔护理系统,其包含:口腔护理装置,其包含具有参考面的头部和多个传感器,所述多个传感器被配置成生成传感器数据,所述传感器数据包含分别对应于所述参考面在自由式口腔护理程序期间的运动测量值和定向测量值的运动数据和定向数据,和在所述自由式口腔护理程序期间从口腔的外部图像生成的图像数据;以及至少一个可编程处理器,其以可通信方式耦合到所述多个传感器,所述至少一个可编程处理器被配置成:从所述传感器数据生成变换后的传感器数据,所述变换后的传感器数据包含被变换成以角定向系统表示的所述定向数据、所述运动数据以及增强的图像数据,所述增强的图像数据表示与对应变换后的定向数据的表示组合的口腔的每个外部图像。
16.在第十方面,本发明可以是一种用于促进口腔卫生的方法,所述方法包含:在自由式口腔护理期间从口腔护理装置生成传感器数据,所述口腔护理装置包含具有参考面的头部和多个传感器,所述多个传感器被配置成生成传感器数据,其中所述传感器数据包含运动数据、定向数据和图像数据,所述运动数据和所述定向数据分别对应于所述参考面在所述自由式口腔护理程序期间的运动测量值和定向测量值,并且所述图像数据在所述自由式口腔护理程序期间从口腔的外部图像生成;以及使用至少一个可编程处理器从所述传感器数据生成变换后的传感器数据,所述变换后的传感器数据包含被变换成以角定向系统表示的所述定向数据、所述运动数据以及增强的图像数据,所述增强的图像数据表示与对应变换后的定向数据的表示组合的口腔的每个外部图像。
17.从下文提供的详细描述,本发明的其它适用领域将是显而易见的。应理解,详细描述和具体示例虽然指示了本发明的优选实施例,但意在仅出于说明的目的而非意在限制本发明的范围。
附图说明
18.结合附图进行阅读时,能够更好地理解前述发明内容以及以下对示例性实施例的详细说明。然而,应当理解,本发明并不局限于在以下附图中示出的精确布置和工具:
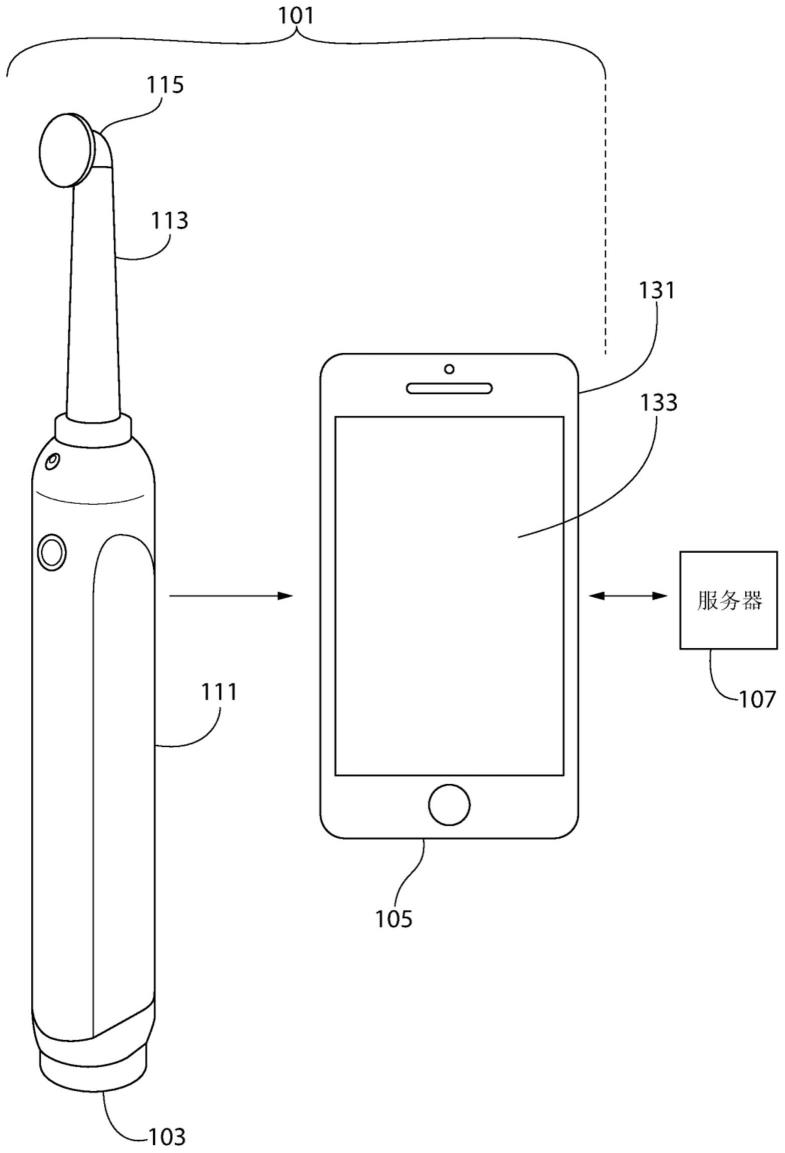
19.图1是根据本发明的实施例的口腔护理系统的示意图;
20.图2是与图1的口腔护理系统一起使用的口腔护理装置的第一实施例的透视图。
21.图3是沿着截面线3—3截取的图2的口腔护理装置的横截面图。
22.图4是图2的口腔护理装置的操作部件的示意图。
23.图5是与图1的口腔护理系统一起使用的口腔护理装置的第二实施例的透视图。
24.图6是沿着截面线6—6截取的图5的口腔护理装置的横截面图。
25.图7是图5的口腔护理装置的操作部件的示意图。
26.图8是与图1的口腔护理系统一起使用的口腔护理装置的第三实施例的透视图。
27.图9是沿着截面线9—9截取的图8的口腔护理装置的横截面图。
28.图10是图8的口腔护理装置的操作部件的示意图。
29.图11a示出用户口内的软组织和硬组织。
30.图11b示出用户口内的上下牙。
31.图12是示出图1的口腔护理系统内的数据流的示意图。
32.图13是示出图1的口腔护理系统的口腔护理装置的方位数据的图,所述方位数据变换成四元数。
33.图14a-e是示出来自图13的方位数据的孤立对的图。
34.图15是示出图1的口腔护理系统的口腔护理装置的方位数据的图,所述方位数据变换成欧拉角(euler angle)单位。
35.图16是示出图1的口腔护理系统的口腔护理装置的磁强计数据的图。
36.图17a示出用于主动地控制图5的口腔护理装置的行程频率的第一过程流。
37.图17b示出用于主动地控制图5的口腔护理装置的行程频率的第二过程流。
38.图18是示出图5的口腔护理装置的无抑制行程频率的图。
39.图19是示出图5的口腔护理装置的部分抑制行程频率的图。
40.图20是示出图5的口腔护理装置的显著抑制行程频率的图。
41.图21是示出从图5的口腔护理装置的头部处或附近的传感器测量的行程频率振幅与刷洗行程压力的图。
42.图22是示出从耦合到图5的口腔护理装置的主体的传感器测量的行程频率振幅与刷洗行程压力的图。
43.图23示出用于评估图1的口腔护理系统的光学传感器数据的过程流。
44.图24a示出图2的口腔护理装置的头部的横截面图。
45.图24b示出图5的口腔护理装置的头部的横截面图。
46.图25示出用于交替致动图1的口腔护理系统中具有不同光谱发射波段的led的过程。
47.图26是示出用以测量图1的口腔护理系统中的荧光强度的线扩散函数的图。
48.图27是示出可在口腔中发现的各种类型的有机物的荧光峰的图。
49.图28是示出可在口腔中发现的各种类型的物质的反射光谱的图。
50.图29是示出随时间推移所测量的齿白度变化的图。
51.图30示出用于确定何时需要更换图5的口腔护理装置的牙刷头部的过程。
52.图31a示出从图5的口腔护理装置的主体中的图像传感器观察的新的牙齿清洁元件。
53.图31b示出从图5的口腔护理装置的主体中的图像传感器观察的需要更换的牙齿清洁元件。
54.图32示出用于使用图1的口腔护理系统生成增强的图像数据的过程流。
55.图33a-d示出可用于使用图32的过程流生成增强的图像数据的覆盖层。
具体实施方式
56.以下对优选实施例的描述在本质上仅是示例性的,并且决不意图限制本发明、本发明的应用或用途。
57.根据本发明的原理的说明性实施例的描述旨在结合附图阅读,这些附图将被视为整个书面描述的一部分。在本文公开的本发明实施例的描述中,对方向或定向的任何提及仅旨在方便描述,而无意以任何方式限制本发明的范围。相对性术语诸如“下”、“上”、“水平”、“竖直”、“上方”、“下方”、“向上”、“向下”、“左”、“右”、“顶部”和“底部”以及其派生词(例如,“水平地”、“向下地”、“向上地”等)应理解成参考如稍后描述的或在论述中的附图中所示的定向。这些相对术语仅是为了方便描述,而不要求装置以特定定向构造或操作,除非明确指明如此。除非另外明确描述,否则例如“附接”、“附连”、“连接”、“耦合”、“互连”等术语是指其中结构彼此直接或间接通过中间结构固定或附接的关系,以及两者可移动或固定不动的附接或关系。此外,本发明的特征和益处参考优选的实施例来说明。因此,本发明明显不应限于示出了可单独存在或以特征的其它组合存在的特征的一些可能的非限制性组合的此类优选实施例;本发明的范围由所附的权利要求书限定。
58.本发明的特征可在软件、硬件、固件,或它们的组合中实施。本文所述的可编程过程不限于任何具体的实施例,并且可在操作系统、应用程序、前台或后台过程、驱动器或它们的任何组合中实施。计算机可编程过程可在单个处理器上或者在多个处理器上或之间执行。
59.本文所述的处理器可以是任何中央处理单元(cpu)、专用处理单元(例如,图形处理单元)、微处理器、微控制器、计算或可编程装置或被配置为执行计算机程序指令(例如,代码)的电路。各种处理器可体现在任何合适类型的计算机和/或服务器硬件(例如,台式机、手提电脑、笔记本电脑、平板电脑、蜂窝电话等)中,并且可包含形成功能性数据处理装置所需的所有常用辅助部件,包含但不限于总线、软件和数据存储装置,例如易失性和非易失性存储器、输入/输出装置、图形用户界面(gui)、扬声器、麦克风、可移动数据存储装置,以及有线和/或无线通信接口装置,包含wi-fi、蓝牙、lan等。
60.计算机可执行指令或程序(例如,软件或代码)以及本文所述的数据可编程到且有形地体现在非暂态计算机可读介质中,该非暂态计算机可读介质可通过如本文所述的相应的处理器访问和检索,通过执行编码在介质中的指令来配置和指导处理器执行期望的功能和过程。体现被配置成此类非暂态计算机可执行指令或程序的可编程处理器的装置在下文称为“可编程装置”或仅简称为“装置”,并且相互通信的多个可编程装置称为“可编程系统”。应注意,如本文所述的非暂态“计算机可读介质”可包含但不限于可被写入和/或通过以可操作方式连接到介质的处理器读取的任何合适的易失性或非易失性存储器,包含随机存取存储器(ram)和其各种类型、只读存储器(rom)和其各种类型、快闪存储器,以及磁或光数据存储装置(例如,内部/外部硬盘、软盘、磁带cd-rom、dvd-rom、光盘、zip
tm
驱动、蓝光
(blu-ray)盘以及其它装置)。
61.在某些实施例中,本发明可以计算机实施的过程和设备(例如,基于处理器的数据处理和通信系统或用于实践那些过程的计算机系统)的形式体现。本发明还可以体现于非暂态计算机可读存储介质中的软件或计算机程序代码的形式体现,在下载到且通过数据处理和通信系统或计算机系统执行时,计算机程序代码片段将处理器配置成产生配置成实施所述过程的特定的逻辑电路。
62.在本文公开范围的情况下,此类范围被用作描述所述范围内的每个值的简略表达。可以选择范围内的任何值作为范围的端点。此外,本文中引用的所有参考文献都以全文引用的方式并入。在本公开中的定义与所引用的参考文献的定义冲突的情况下,以本公开为准。
63.详细参考附图,图1示出根据本发明的实施例的口腔护理系统101。口腔护理系统101包含口腔护理装置103和可编程装置105。可编程装置105可与服务器107通信,以用于存储较大量的数据或提供服务器侧处理功能。然而,服务器107的存在以及可编程装置105与服务器107之间的通信不是对本发明的限制,除非在权利要求中明确阐述。口腔护理装置103、可编程装置105和服务器107中的每一者包含可编程处理器,并且相应可编程处理器中的每一者可执行本文所描述的一个或多个过程。此外,当过程被描述为由可编程装置105的可编程处理器执行时,所述过程也可由服务器107的可编程处理器执行,或者,所述过程的一部分可由可编程装置105的可编程处理器执行并且所述过程的一部分可由服务器107的可编程处理器执行。类似地,当过程被描述为由口腔护理装置103的可编程处理器执行时,所述过程也可全部或部分地由可编程装置105的可编程处理器和/或由服务器107的可编程处理器执行。换句话说,哪个可编程处理器执行过程的哪个部分的分配完全由口腔护理系统101的特定实施方案确定,并且除非在权利要求中明确陈述,否则不是对本发明的限制。
64.口腔护理装置103大体上包含手柄111、颈部113和头部115。颈部113在手柄111与头部115之间延伸并且将头部115连接到手柄111。手柄111为用户提供可借以在刷洗程序期间容易地抓握和操控牙刷103的机构。手柄111可由许多不同的形状、尺寸和材料形成并且可通过本领域技术人员熟知的各种制造方法来形成。手柄111沿着纵向轴线具有大体上细长的形状,并且在其一端处过渡到颈部113中。虽然颈部113通常具有比手柄111小的横截面面积,但是本发明不限于此。广义上,颈部113在手柄111与头部115之间形成过渡区。虽然头部115通常相对于颈部113变宽,但在一些实施例中,头部115可仅仅是颈部113和/或手柄111的连续延伸部或其变窄部分。在替代实施例中,手柄111、头部115和/或颈部113中的一者或多者可具有不同的形状、大小、定向等。除非权利要求书中另外指明,否则本发明不受口腔护理装置103的任何部分的大小和/或形状的限制。附加特征也可结合到牙刷中或设置在牙刷上。
65.在示例性实施例中,头部115,包含口腔护理装置103的颈部113的至少一部分在内,可从手柄111拆卸,使得头部115可更换为另一头部115。除非在权利要求中特别阐述,否则手柄111、颈部113和头部115是作为整体还是多件构造(包含连接技术)并不是对本发明的限制。
66.可编程装置105包含外壳131和显示器133。外壳131围封可编程装置105的其它各种部件,包含可编程处理器。可编程装置105的其它部件可包含电源,例如电池、存储器、通
信子系统(以实现与其它可编程装置的无线和/或有线通信)、成像子系统(例如相机)等。存储器可以是使可编程处理器能够执行如本文所述的功能的任何适当类型的存储器或存储装置。举例来说,存储器可以是易失性和/或非易失性随机存取存储器。除非在权利要求中明确陈述,否则可编程装置105的部件不是对本发明的限制。
67.显示器133可以是任何类型的发光显示器,如示例性实施例中所示,显示器133可以是led面板。在某些其它实施例中,显示器133可以是lcd面板、oled面板,或可通过可编程装置105的可编程处理器电子控制的任何其它类型的显示器。在某些实施例中,显示器133可以是直接在显示表面上接受来自用户的输入的触敏显示器。因此,此类触敏显示器133可用作可编程装置105的用户界面。除非在权利要求中明确阐述,否则显示器133的类型和配置不是对本发明的限制。类似地,除非在权利要求中明确阐述,否则用户界面的类型和配置不是对本发明的限制。
68.图2
–
3示出作为口腔的检查装置151示出的口腔护理装置103的第一示例性实施例。检查装置151的头部115包含参考面153,并且如下文更详细地描述,口腔护理系统101确定参考面153在用户的口腔内的位置和定向。在某些实施例中,牙齿清洁元件可从参考面153延伸。参考面153可以是平面的、弯曲的或具有任何其它类型的表面配置。除非在权利要求中明确阐述,否则参考面153的配置以及口腔护理装置103的任何工具、器具或其它特征是否从参考面153延伸都不是对本发明的限制。
69.检查装置151包含围封在手柄111内的电路板157。电路板157和检查装置151的所有其它电子部件由可再充电电池159供电,所述可再充电电池也围封在手柄111内。通过将检查装置151的端部置于充电底座单元161的插口中以便通过感应式充电对再充电电池159进行再充电,可对可再充电电池159进行再充电。此类电感式充电是本领域众所周知的,因此本文未详细论述其电路和功能。在某些实施例中,检查装置151可包含一次性电池而非可再充电电池159。除非在权利要求中明确阐述,否则用于向检查装置151的电子部件提供电力的电源的类型并不是对本发明的限制。
70.电源按钮163操作性地耦合到电路板157,使得用户可控制到电路板157和检查装置151的其它电子部件的电力。检查装置151的其它电子部件包含至少一个可编程处理器165和多个传感器,并且这些其它电子部件中的每一者操作性地耦合到电路板157。电路板157充当电子连接件,使得所有电子部件可由可编程处理器165控制且由此可在口腔护理系统101的操作期间使用。包含在检查装置151中的每个传感器被配置成生成传感器数据,所述传感器数据被传送到可编程处理器165。可编程处理器165可被编程而以各种方式处理其接收的传感器数据,下文更详细地描述其中一些方式。
71.包含在检查装置151中的传感器包含惯性测量单元(imu)167、图像传感器169和光学传感器171。在示例性实施例中,imu 167是微机电系统(mems),其为市场上容易获得的部件,并且包含加速度计、陀螺仪和磁强计。下文更详细地描述由imu 167和其它电子部件提供的功能。同样在示例性实施例中,imu 167示出为包含在检查装置151的手柄111内并且耦合到所述手柄。然而,在某些实施例中,imu 167可在不丧失功能的情况下包含在颈部113或头部115内并且耦合到所述颈部或头部,即使处理来自imu 167的传感器数据的方式可能需要改变以便保持相同的功能也如此。除非权利要求中另外明确阐述,否则imu 167耦合到检查装置151的方式以及imu的耦合位置不是对本发明的限制。
72.imu 167生成呈3轴线性加速度数据、3轴定向数据和3轴磁强计数据的形式的传感器数据。imu 167的某些实施例可生成额外类型的传感器数据。来自imu 167的线性加速度数据、定向数据和磁强计数据进一步由口腔护理系统101以下文更详细地描述的方式处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
73.使用线性加速度数据、定向数据和磁强计数据,imu 167可用于建立检查装置151的装置坐标系。在此装置坐标系中,x轴被限定为检查装置151的纵向轴线,z轴由向下重力限定,并且y轴被限定为与x轴和z轴正交的轴线。在某些实施例中,x轴可限定为检查装置151的纵向轴线,z轴可限定为垂直于参考面153,在检查装置151的某一定向上,所述参考面与向下重力一致,并且y轴可限定为与x轴和z轴都正交的轴线。如下文更详细地描述,通过生成变换后的传感器数据,其中定向数据以角定向系统表示,口腔护理系统101有助于确定检查装置151的头部115在用户的口腔内的位置和定向。在某些实施例中,变换后的传感器数据还包含作为由任何包含为检查装置151的部分的多个传感器中的任一传感器生成的包含为传感器数据的部分的所有非变换后类型的数据。在某些实施例中,定向数据变换成以四元数单位表示。在其它实施例中,定向数据变换成以欧拉角表示。
74.图像传感器169被配置为相机,其物镜面向头部115的参考面153的方向。图像传感器169操作性地耦合到电路板157,使得图像传感器169可由可编程处理器165控制。图像传感器169以机械方式耦合到手柄111的内部,并且手柄111包含开口181,图像传感器169可在检查装置151不在使用中时通过所述开口捕捉具有参考表面153的头部115的一侧的图像。当在口腔护理程序期间使用检查装置151时,图像传感器169能够捕捉用户嘴部的图像。此类图像还可包含用户面部嘴部周围的部分。在示例性实施例中,图像传感器169可具有设置在头部115的中点与手柄111中的开口181之间的点处的固定焦距。在此类实施例中,图像传感器169不需要花费任何时间调整焦点以适应图像的不同深度。
75.可选择图像传感器169的技术规格以适应口腔护理系统101的特定需求或使用。在某些实施例中,图像传感器169可被配置成以每秒1到90帧的帧速率捕捉图像。另外,在某些实施例中,图像传感器169的分辨率可在约30x30像素与5000x5000像素之间。在某些其它实施例中,像素阵列可包含总共约900个像素到总共约2500万个像素,并且此类像素阵列可以是正方形阵列或非正方形阵列。在某些实施例中,图像传感器169可以是彩色相机、单色相机、色调感测相机和近红外相机中的任一者。在某些其它实施例中,图像传感器169可包含一个或多个滤波器以提供所需波长的滤波。在某些实施例中,图像传感器169可以是ccd相机、cmos相机或任何其它类型的电子图像捕捉装置。在某些实施例中,图像传感器169可包含用于在图像捕捉期间提供照明的光源。图像传感器169因此可包含广泛范围的配置和功能选项。即使如此,除非在权利要求中明确阐述,否则图像传感器169的配置和功能不受限制。
76.图像传感器169生成图像数据形式的传感器数据。此图像数据由口腔护理系统101以下文更详细地描述的方式进一步处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
77.光学传感器171位于检查装置151的头部115内并且操作性地连到电路板157,使得光学传感器171可由可编程处理器165控制并将数据提供给可编程处理器165。在此示例性实施例中,光学传感器171位于光模块173内并且结合所述光模块操作。在某些实施例中,光
学传感器171可位于检查装置151的手柄111、颈部113或头部115内的其它地方,使得所述光学传感器保持操作性地耦合到电路板157。
78.光模块173充当光发射器和光收集器,并且定位成使得从光模块173发射的光被引导通过在头部115的参考表面115中形成为半透明光学窗的光学孔口175。类似地,光学反馈可通过光学孔口175进入头部115,以由光模块173内的光学传感器171收集。在检查装置151的操作期间,进入光模块173的光是光学反馈,其为有机物响应于被从光模块173发射的光照射而反射和/或发荧光的光。如应显而易见,此类有机物可以是口腔软组织、口腔硬组织、斑块、生物膜和通常可在用户的口腔内发现的许多其它类型的有机物。
79.光模块173包含在图21a中示为多个led的光源,所述光源用于发射一个或多个波段中的光,所述波段被选择为适合在口腔护理程序期间通过与用户口腔内的有机物的相互作用来生成所需的光学反馈。光模块173操作性地耦合到电路板157,使得来自光模块173的光的发射可由可编程处理器165控制。在某些实施例中,来自一个或多个led的光可通过光导引导到光模块173。
80.在示例性实施例中,发射的光的波段包含可见光谱中的光和可见光谱的紫光范围中的光中的至少一者。在某些实施例中,可见光谱中的光跨越基本上所有宽带可见光谱,从约390nm的波长延伸到约2300nm的波长。在某些实施例中,此宽带可见光谱可从约450nm的波长延伸到约1000nm的波长。在某些实施例中,可见光谱的紫光范围中的光可以是以405nm波长为中心的窄带光谱。
81.可选择光学传感器171的技术规格以适应口腔护理系统101的特定需求或使用。在某些实施例中,光学传感器171可被配置成以约10hz的速率输出光学传感器数据。在某些其它实施例中,可使用更高或更低的数据速率来输出光学传感器数据。
82.在此示例性实施例中,光学传感器171可以是ccd、cmos或具有足够像素分辨率的其它类型的电子图像捕捉装置,以使用在口腔护理程序期间接收的光学反馈来捕捉用户口腔内的图像。因此,光学传感器数据可用于生成口腔内的口腔组织的静态图像或视频。另外,示为漫射器177的具有已知散射图案的光散射元件定位在光学传感器171与光学孔口175之间。使用散射的入射光,可编程处理器165(或与口腔护理系统101相关联的另一处理器)能够从口腔内的有机物反射的光学反馈生成3维地形图像,所述光学反馈中的大部分从口腔软组织和口腔硬组织反射而来。在创建3维地形图像的实施例中,从任何传感器单独地或组合地收集的任何传感器数据可覆盖到地形图像上,以便提供用户口腔的许多不同方面的视觉资料。在某些实施例中,图案化掩模可用作光散射元件,并且此类图案化掩模仍将使得能够生成3维地形图像。在某些其它实施例中,微透镜的漫射阵列可用作光散射元件,并且此类微透镜阵列仍能生成3维地形图像。
83.在某些实施例中,光学传感器171可以是64通道8x8像素阵列,并且此类光学传感器171可操作为可见波段和近红外波段中的一者或两者中的光谱仪。
84.光学传感器171生成光学传感器数据形式的传感器数据。此光学传感器数据由口腔护理系统101以下文更详细地描述的方式进一步处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
85.在某些实施例中,可从检查装置151中排除光学传感器171。然而,应注意,光学传感器171的排除必定限制口腔护理系统101的功能。在某些实施例中,检查装置151还可包含
额外传感器,可包含每个额外传感器以向口腔护理系统101添加其它的功能。除非在权利要求中明确阐述,否则包含特定类型或类别的传感器,或相反地,排除特定类型或类别的传感器,并不是对本发明的限制。
86.图4示出当使用检查装置151作为图1的口腔护理系统101的一部分时的数据流和控制信号。所示数据流包含来自多个传感器的原始传感器数据、变换后的传感器数据,以及提供给用户和口腔护理系统101的其它部件的反馈。如前所指示,可编程处理器165操作性地耦合到imu 167、图像传感器169、光学传感器171和光模块173中的每一者,并且这些前述部件中的每一者被包含为检查装置151的一部分。可编程处理器165通过有线或无线连接以可通信方式与可编程处理器199耦合,所述可编程处理器如所示是可编程装置105的一部分。在某些实施例中,可编程处理器199还以可通信方式耦合到服务器107的可编程处理器(未示出)。
87.imu 167包含3轴加速度计191、3轴磁强计193、3轴陀螺仪195和内部校准单元197。此类imu在市场上是容易获得的,并且某些实施例还可包含可用于实现与可编程装置105的可编程处理器199的直接无线通信的无线通信模块。加速度计191生成基于x、y、z坐标的3轴线性加速度数据,并且所述线性加速度数据被引导到校准单元197和可编程处理器165两者。磁强计193生成3轴磁方向数据,并且所述磁方向数据被引导到校准单元197。陀螺仪195生成基于x、y、z坐标的3轴定向数据,并且所述定向数据被引导到校准单元197和可编程处理器165两者。校准单元197使用来自磁强计193的传感器数据对来自加速度计191和陀螺仪195的传感器数据进行定向,使得来自两方的传感器数据与装置坐标系对准。
88.图像传感器169生成图像数据,并且所述图像数据被引导到可编程处理器165。在示例性实施例中,图像数据表示在口腔护理程序期间生成的口腔的外部图像。
89.光学传感器171生成光学传感器数据,并且所述光学传感器数据被引导到可编程处理器165。在示例性实施例中,光学传感器数据表示来自光模块173的光入射到用户口腔内的有机物上而产生的光学反馈。当来自光模块173的光入射到有机物上时,光学反馈可以是反射光或荧光中的一者。在某些实施例中,光学传感器171可受益于常规色彩校准。在此类实施例中,来自光模块173的光从具有已知色彩或色彩方案的校准表面的反射可用于将光学传感器171校准到建立的标准。在示例性实施例中,光学传感器数据还可包含当光学传感器171具有足够的分辨率和焦点以获得当用户观察时有用的此类图像数据时从光学反馈生成的图像数据。同样在示例性实施例中,光学传感器171包含具有已知散射图案的漫射器177,使得光学传感器数据还可包含也从光学反馈生成的3维地形图像数据。
90.可编程处理器165从每个传感器接收传感器数据,并对所述传感器数据执行数据融合和变换过程201。此数据融合和变换过程生成变换后的传感器数据。作为此变换过程的一部分,定向数据以角定向系统表示。以角定向系统来表示定向数据的目的是为了促进数学基本计算以确定检查装置151在口腔内的位置和定向,并且促进在口腔护理程序中当头部定位在口腔的不同部分内时所测量的方位和定向的关系和差异的标识。在示例性实施例中,定向数据变换成以四元数单位表示。如本领域的技术人员将认识到的,四元数单位包含范围从-1到1的w值,其中此全范围表示物体在同一方向上的两个全旋转。四元数单位对于确定牙刷头部在用户口腔中的位置和定向特别有用的原因之一是,四元数单位容易描述物体在3维空间中的旋转。当用户正在刷洗时,牙刷围绕牙齿表面从内部旋转到外部或从外部
旋转到内部,而四元数单位正是能够跟踪这种围绕牙齿的旋转。并且,这种旋转可用于确定在自由式口腔护理程序期间牙刷的头部在口腔内的位置和定向。
91.出于本说明书的目的,自由式程序是其中用户确定口腔中要开始口腔护理程序的区段和/或确定口腔内要定位口腔护理装置的区段的次序的程序。因此,自由式程序是不遵循由用户以外的任何来源限定的模式的程序。出于本说明书的目的,自由式刷洗程序是其中刷牙作为口腔护理的一部分进行的自由式程序。相比之下,如果用户遵循指令,所述指令告知用户在口腔内在何处开始和/或结束口腔护理程序或指示口腔内要移动口腔护理装置的区段的次序,则口腔护理程序是非自由式程序。举例来说,本文所论述的训练口腔护理程序是非自由式程序。出于本说明书的目的,非自由式刷洗程序是其中刷牙作为口腔护理程序的一部分进行的非自由式程序。举例来说,本文所论述的训练刷洗程序是非自由式刷洗程序。训练口腔护理程序和训练刷洗程序在本文中都可称为“训练程序”。
92.在其它实施例中,定向数据变换成以欧拉角表示。在示例性实施例中,变换后的传感器数据还包含传感器数据的所有非变换部分,使得所有收集的传感器数据组合或融合在一起到分组中,由此促进对所有所收集传感器数据作为整体的进一步分析。另外,传感器数据的主要部分在数据分析过程期间可具有其它个别效用。在某些实施例中,可编程处理器199可执行一些或全部数据融合和变换过程。
93.可编程处理器165将融合和变换后的传感器数据传送到可编程处理器199以供分析。如所示,可编程处理器199被包含为可编程装置105的一部分。然而,在某些实施例中,可编程处理器199可被包含为服务器107的一部分。而在其它实施例中,本文中描述为由可编程处理器199执行的过程可分布在多个可编程处理器上,而不论每个此类可编程处理器是口腔护理装置103、可编程装置105还是服务器107的一部分。变换后的传感器数据的分析可包含以下各项中的一者或多者:牙釉质白度评估203;在口腔护理程序期间,头部115的参考面153在口腔内的位置和定向确定205;对用户的口腔护理特性的评估209;以及对口腔内的有机物进行标识和区分211。其它类型的分析也可由可编程处理器199执行。在牙齿清洁元件从参考面153延伸的某些实施例中,所述分析还可包含对刷牙压力的评估207。
94.在标识和区分口腔内的有机物211的过程中,在某些实施例中,所述过程可集中于标识以及区分口腔硬组织、口腔软组织和斑块。在某些其它实施例中,标识口腔内的有机物211的过程还可包含标识和区分原卟啉、血液、水合或脱水的口腔软组织,以及牙釉质中可能存在的龋病。而在其它实施例中,标识口腔内的有机物211的过程可包含标识和区分其它类型的硬组织或软组织口腔健康问题。
95.口腔护理特性评估209可包含口腔健康特性、刷洗有效性特性和齿白度特性中的一者或多者。这些特性中的任何一个或多个可基于口腔内的单独区段或基于整个口腔来评估。在某些实施例中,口腔健康特性可包含软组织健康特性和硬组织健康特性中的至少一者。在某些实施例中,所述软组织健康特性可包含软组织着色特性、出血特性、血液氧化特性和组织水合特性中的至少一者。在某些实施例中,硬组织健康特性可包含龋齿特性和细菌存在特性中的至少一者。在某些实施例中,刷洗有效性特性可包含细菌存在特性和龋齿特性中的至少一者,并且在包含牙齿清洁元件的实施例中,可包含刷洗压力特性和行程频率特性。
96.在分析变换后的传感器数据之后,可编程处理器199可将控制反馈213传送到可编
程处理器165。在某些实施例中,控制反馈213可包含控制数据,可编程处理器165使用所述控制数据来控制多个传感器中的一个或多个传感器的操作。例如,控制反馈213可以是激活或解除激活一个或多个传感器的信号。作为另一示例,控制反馈213可以是增加或减小一个或多个传感器生成传感器数据的速率的信号。
97.同样在分析变换后的传感器数据期间或之后,可编程处理器199可将用户反馈217传送给用户。此用户反馈217可包含以下一个或多个:反映一个或多个评估的口腔护理特性的口腔护理得分219;在口腔护理程序期间实时向用户提供的音频、视觉和/或触觉信号221;在口腔护理程序期间获得的图像和/或视频223;以及对传感器数据和/或使用传感器数据执行的数据分析的建议或指示性表示225。在某些实施例中,可使用可编程装置105发出用作对用户的反馈的音频、视觉和/或触觉信号221。在口腔护理装置103是电动牙刷的实施例中,可控制振动电机以使得在口腔护理程序期间使用振动电机的振动频率和/或振幅向用户提供触觉信号。在某些实施例中,口腔护理装置103可包含安装到手柄111的扬声器和/或led,使得可使用口腔护理装置103来发出音频和/或视觉信号221。在某些实施例中,所述音频、视觉和/或触觉信号可向用户提供关于口腔护理装置的头部在口腔内的方位以及在该方位处的口腔健康特性的评估的实时信息。在某些实施例中,可通过将口腔护理系统101与语音辅助平台介接来生成音频信号。在此类实施例中,反馈217将由可编程处理器199传送到语音辅助平台,并且语音辅助平台将以口头语言的形式向用户提供音频反馈。
98.图5-6示出示为电动牙刷251的口腔护理装置103的第二示例性实施例。电动牙刷251包含手柄253、颈部255、头部257和多个牙齿清洁元件259。牙齿清洁元件259从头部257的参考表面261延伸。
99.在此示例性实施例中,将至少一个牙齿清洁元件示为从头部257的参考表面261延伸以用于清洁牙齿表面的多个刷毛。如本文所用,术语“牙齿清洁元件”在一般意义上用于指可用于通过相关表面接触来清洁或打磨牙齿的任何结构。在某些实施例中,电动牙刷251可包含单个牙齿清洁元件,并且在其它实施例中,电动牙刷251可包含两个或更多个牙齿清洁元件。至少一个牙齿清洁元件的常见示例包含但不限于刷毛簇、长丝刷毛、纤维刷毛、尼龙刷毛、螺旋刷毛、橡胶刷毛、弹性体突起、柔性聚合物突起、它们的组合和/或包括此类材料或组合的结构。合适的弹性体材料包含适用于口腔卫生设备的任何生物可相容的弹性材料。为了提供最佳的舒适性以及清洁益处,至少一个牙齿清洁元件可以是具有在a8至a25肖氏硬度范围内的硬度特性的弹性体材料。也可使用在所指出的硬度范围之内或之外的其它材料。
100.牙齿清洁元件259可以本领域已知的任何方式连接到参考表面261并且因此连接到头部257。例如,钉/锚、模内簇绒(imt)或无锚簇绒(aft)可用于将刷毛安装到参考表面261上。在aft中,例如通过超声焊接将板或膜固定到牙刷头部。刷毛延伸穿过所述板或膜。刷毛在板或膜的一侧上的自由端部执行清洁功能。刷毛在板或膜的另一侧上的端部通过加热熔融在一起,以锚定在适当位置。或者,刷毛可通过延伸穿过参考表面261中的适当开口安装到簇块或区段上,使得刷毛的底部安装在参考表面261内或下方。
101.电路板271围封在手柄253内。电路板271以及电动牙刷251的所有其它电子部件由同样围封在手柄253内的可再充电电池273供电。可再充电电池273可通过将电动牙刷251的端部置于例如图2中所示的充电底座单元161的充电底座单元的插口中而进行再充电。在某
些实施例中,电动牙刷251可包含一次性电池而非可再充电电池273。除非在权利要求中明确阐述,否则用于向电动牙刷251的电子部件提供电力的电源的类型并不是对本发明的限制。
102.电动牙刷251包含具有轴269的振动电机267,所述轴与颈部255机械接合以使得当振动电机267被激活时,在电动牙刷251的头部257中引发振动。在某些实施例中,振动电机267的轴269可直接机械接合头部257而非颈部255。振动电机269可被布置成以本领域已知的任何数目的方式在头部中引发振动,并且因此,除非在权利要求中明确阐述,否则振动电机267在电动牙刷251的头部257中引发振动的特定方式不是对本发明的限制。
103.电源按钮275操作性地耦合到电路板271,使得用户可控制到电路板271和电动牙刷251的其它电子部件的电力。电动牙刷251的其它电子部件包含至少一个可编程处理器277和多个传感器,并且这些其它电子部件中的每一者操作性地耦合到电路板271。电路板271充当电子连接件,使得所有电子部件可由可编程处理器277控制且由此可在口腔护理系统101的操作期间使用。包含在电动牙刷251中的每个传感器被配置成生成传感器数据,所述传感器数据被传送到可编程处理器277。可编程处理器277可被编程而以各种方式处理其接收的传感器数据,下文更详细地描述其中一些方式。
104.包含在电动牙刷251中的传感器包含惯性测量单元(imu)279、图像传感器281和光学传感器283。在此示例性实施例中,imu 279是微机电系统(mems),其为市场上容易获得的部件,并且包含加速度计、陀螺仪和磁强计。下文更详细地描述由imu 279和其它电子部件提供的功能。同样在此示例性实施例中,imu 279示出为包含在电动牙刷251的主体253内并且耦合到所述主体。然而,在某些实施例中,imu 279可在不丧失功能的情况下包含在颈部255或头部257内并且耦合到所述颈部或头部,即使来自imu 279的传感器数据经历的过程可能需要改变以便保持功能也如此。除非权利要求中另外明确阐述,否则imu 279耦合到电动牙刷251的方式以及imu的耦合位置不是对本发明的限制。
105.imu 279生成呈3轴线性加速度数据、3轴定向数据和3轴磁强计数据的形式的传感器数据。imu 279的某些实施例可生成额外类型的传感器数据。来自imu 279的线性加速度数据、定向数据和磁强计数据进一步由口腔护理系统101以下文更详细地描述的方式处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
106.使用线性加速度数据、定向数据和磁强计数据,imu 279可用于建立用于电动牙刷251的装置坐标系。与图2所示的口腔护理装置151类似,电动牙刷251的装置坐标系的x轴限定为电动牙刷251的纵向轴线,z轴由向下重力限定,并且y轴限定为与x轴和z轴正交的轴线。如下文更详细地描述,通过生成变换后的传感器数据,其中定向数据以角定向系统表示,口腔护理系统101有助于确定电动牙刷251的头部257在用户的口腔内的位置和定向。在某些实施例中,变换后的传感器数据还包含形成由包含为电动牙刷251的部分的多个传感器中的任一传感器生成的传感器数据的部分的所有非变换后类型的数据。在某些实施例中,定向数据变换成以四元数单位表示。在其它实施例中,定向数据变换成以欧拉角表示。
107.图像传感器281被配置为相机,其静止或可自动调节物镜面向从头部257的参考表面261延伸的牙齿清洁元件259。在具有可自动节物镜的实施例中,图像传感器281在捕捉图像时自动聚焦于其视场中的对象。图像传感器281操作性地连到电路板271,使得图像传感器281可由可编程处理器277控制。图像传感器281以机械方式耦合到手柄253的内部,并且
手柄253包含开口293,图像传感器281可在电动牙刷251不在使用中时通过所述开口捕捉牙齿清洁元件259的图像。当在刷洗程序期间使用电动牙刷251时,图像传感器281能够捕捉用户嘴部的图像。此类图像还可包含用户面部嘴部周围的部分。在此示例性实施例中,图像传感器281可具有设置在牙齿清洁元件259与手柄253中的开口293之间的点处的固定焦距。在此类实施例中,图像传感器281不需要花费任何时间调整焦点以适应图像的不同深度。在某些其它实施例中,图像传感器281可设置成在两个不同的焦距之间切换,第一焦距在牙齿清洁元件259距手柄253中的开口293的距离处,并且第二焦距在牙齿清洁元件259距手柄253中的开口293的约一半距离处。在此类实施例中,图像传感器281可在大部分操作期间默认为第二焦距,然后在某些触发事件后切换到第一焦距,例如在下文中进一步详细描述。通过实现在这两个焦距之间的切换,图像传感器281能够更好地支持其在此类实施例中预期提供的两个主要功能:在刷洗程序期间生成用户嘴部的图像,以及在被触发以生成牙齿清洁元件的图像时——但并非在刷洗程序期间——生成牙齿清洁元件的图像。
108.图像传感器281的技术规格可被选择为适合口腔护理系统101的特定需求或使用,并且此类技术规格可与上文关于口腔护理装置151的图像传感器169所论述的相同。图像传感器281因此可包含广泛范围的配置和功能选项,并且除非在权利要求中明确陈述,否则图像传感器281的配置和功能不受限制。
109.图像传感器281生成图像数据形式的传感器数据。此图像数据由口腔护理系统101以下文更详细地描述的方式进一步处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
110.光学传感器283位于电动牙刷251的手柄253内,并且操作性地耦合到电路板271,使得光学传感器283可由可编程处理器277控制。在此示例性实施例中,光学传感器283还直接以机械方式耦合到电路板271。在某些实施例中,光学传感器271可位于电动牙刷251的手柄253、颈部255或头部257内的其它地方,并且尽管光学传感器保持操作性地耦合到电路板271,但光学传感器283不需要直接以机械方式耦合到电路板271。光学传感器283结合设置在头部257中的光模块285操作。
111.光模块285充当光发射器和光收集器,并且定位成使得从光模块285发射的光被引导通过在参考面261中形成的光学孔口287。类似地,光学反馈可通过光学孔口287进入头部257,并且由光模块285收集。牙齿清洁元件259形成有围绕光学孔口287的间隙291,以便1)为在刷洗程序期间从光模块285发射的光提供清晰路径以从头部257传出以入射到用户的口腔内的有机物上,以及2)接收光学反馈,所述光学反馈是所述有机物响应于被从光模块285发射的光照射而反射和/或发荧光的光。
112.由光模块285收集的光学反馈通过光导289引导到光学传感器271,所述光导以光学方式将光模块285耦合到光学传感器271。在某些实施例中,光导289可以是宽带光纤。光模块285包含光源,所述光源可以是类似于图21b中所示的用于发射一个或多个波段中的光的多个led,所述波段被选择为适合在刷洗程序期间通过与用户口腔内的有机物的相互作用来生成所需的光学反馈。在示例性实施例中,发射的光的波段包含可见光谱中的光和可见光谱的紫光范围中的光中的至少一者。在某些实施例中,可见光谱中的光跨越基本上所有宽带可见光谱,从约390nm的波长延伸到约2300nm的波长。在某些实施例中,此宽带可见光谱可从约450nm的波长延伸到约1000nm的波长。在某些实施例中,可见光谱的紫光范围中
的光可以是以405nm波长为中心的窄带光谱。
113.光模块285操作性地耦合到电路板271,使得来自光模块285的光的发射可由可编程处理器277控制。在某些实施例中,来自一个或多个led的光可通过第二光导引导到光模块285。而在其它实施例中,光传感器283可定位在光模块285内。
114.可选择光学传感器283的技术规格以适应口腔护理系统101的特定需求或使用。在某些实施例中,光学传感器283可被配置成以约10hz的速率输出光学传感器数据。在某些其它实施例中,可使用更高或更低的数据速率来输出光学传感器数据。在此示例性实施例中,光学传感器283可以是ccd、cmos或具有足够像素分辨率的其它类型的电子图像捕捉装置,以使用在刷洗程序期间接收的光学反馈来捕捉用户口腔内的图像或视频。在此类实施例中,光学传感器283可被配置成以每秒1到90帧的帧速率捕捉图像。另外,在此类实施例中,光学传感器283的分辨率可在约30x30像素与5000x5000像素之间。在某些其它实施例中,像素阵列可包含总共约900个像素到总共约2500万个像素,并且此类像素阵列可以是正方形阵列或非正方形阵列。在某些实施例中,光学传感器283可以是彩色相机、单色相机、色调感测相机和近红外相机中的任一者。在某些其它实施例中,光学传感器283可包含一个或多个滤波器以提供所需波长的滤波。在某些实施例中,光学传感器283可以是ccd相机、cmos相机或任何其它类型的电子图像捕捉装置。在某些实施例中,光学传感器283可定位在头部257中,并且产生已知散射图案的漫射器、图案化掩模或微透镜阵列可放置在光学传感器283的前面,使得可编程处理器277(或与口腔护理系统101相关联的任何其它处理器)能够从穿过漫射器、图案化掩模或微透镜阵列的光学反馈生成3维地形图像。
115.在某些实施例中,光学传感器283可以是在可见波段和近红外波段中的一者或两者中操作的64通道8x8像素阵列集成光谱仪。在此类实施例中,光学传感器283不太可能用于捕捉图像数据或用于从光学反馈生成3维地形图像。
116.光学传感器283生成包含图像数据的光学传感器数据形式的传感器数据。来自光学传感器283的图像数据可按与来自图像传感器281的图像数据相同的方式处理。此光学传感器数据由口腔护理系统101进一步处理为传感器数据的一部分。
117.在某些实施例中,可从电动牙刷251中排除光学传感器283。然而,应注意,光学传感器283的排除必定限制口腔护理系统101的功能。在某些实施例中,电动牙刷251还可包含额外传感器,可包含每个额外传感器以向口腔护理系统101添加其它的功能。除非在权利要求中明确阐述,否则包含特定类型或类别的传感器,或相反地,排除特定类型或类别的传感器,并不是对本发明的限制。
118.图7示出当使用电动牙刷251作为图1的口腔护理系统101的一部分时的数据流和控制信号。所示数据流包含来自多个传感器的原始传感器数据、变换后的传感器数据,以及提供给用户和口腔护理系统101的其它部件的反馈。如前所指示,可编程处理器359操作性地耦合到电动牙刷251的imu279、图像传感器281、光学传感器273和光模块285中的每一者,并且这些前述部件中的每一者被包含为电动牙刷251的一部分。可编程处理器277通过有线或无线连接以可通信方式与可编程处理器293耦合,所述可编程处理器在此示例性实施例中是可编程装置105的一部分。在某些实施例中,可编程处理器293还以可通信方式耦合到服务器107的可编程处理器(未示出)。
119.imu 279包含3轴加速度计295、3轴磁强计297、3轴陀螺仪299和内部校准单元301。
在某些实施例中,imu 279还可包含可用于实现与可编程装置105的可编程处理器293的直接无线通信的无线通信模块。加速度计295生成基于x、y、z坐标的3轴线性加速度数据,并且所述线性加速度数据被引导到校准单元387和可编程处理器277两者。磁强计297生成3轴磁方向数据,并且所述磁方向数据被引导到校准单元301。陀螺仪299生成基于x、y、z坐标的3轴定向数据,并且所述定向数据被引导到校准单元301和可编程处理器277两者。校准单元301使用来自磁强计297的传感器数据对来自加速度计295和陀螺仪299的传感器数据进行定向,使得来自两方的传感器数据与装置坐标系对准。
120.图像传感器281生成图像数据,并且所述图像数据被引导到可编程处理器277。在此示例性实施例中,图像数据可以是两种类型中的一种。第一类型是表示在刷洗程序期间生成的口腔的外部图像的图像数据。第二类型是表示在刷洗程序之外的时间生成的牙齿清洁元件259的图像的图像数据。在某些实施例中,图像传感器281可用于生成除上述两种类型之外的图像数据。
121.光学传感器283生成光学传感器数据,并且所述光学传感器数据被引导到可编程处理器277。在此示例性实施例中,光学传感器数据表示来自光模块285的光入射到用户口腔内的有机物上而产生的光学反馈。当来自光模块285的光入射到有机物上时,光学反馈可以是反射光或荧光中的一者。在某些实施例中,光学传感器283可与头部257一起定位,并且通过例如漫射器、图案化掩模或微透镜阵列等具有已知散射图案的光散射元件接收光学反馈。在此类实施例中,光学传感器数据可包含也从光学反馈生成的3维地形图像数据。
122.在某些实施例中,光学传感器283可受益于常规色彩校准。如图5中所示,示例性实施例包含盖263以在不使用电动牙刷251时覆盖牙齿清洁元件259。盖263包含当盖263放置在牙齿清洁元件259上方时面向光学孔口287的内表面265,所述此内表面265包含可用于将光学传感器283校准到建立的标准的已知色彩或色彩方案。
123.可编程处理器277从每个传感器接收传感器数据,并对所述传感器数据执行数据融合和变换过程303。此数据融合和变换过程生成变换后的传感器数据。作为此变换过程的一部分,定向数据以角定向系统表示。在示例性实施例中,定向数据变换成以四元数单位表示。在其它实施例中,定向数据变换成以欧拉角表示。在示例性实施例中,变换后的传感器数据还包含传感器数据的所有非变换部分,使得所有收集的传感器数据组合或融合在一起到分组中,由此促进对所有所收集传感器数据作为整体的进一步分析。另外,传感器数据的主要部分在数据分析过程期间可具有其它个别效用。在某些实施例中,可编程处理器277可执行一些或全部数据融合和变换过程。
124.可编程处理器277将融合和变换后的传感器数据传送到可编程处理器293以供分析。如所示,可编程处理器293被包含为可编程装置105的一部分。然而,在某些实施例中,可编程处理器293可被包含为服务器107的一部分。而在其它实施例中,本文中描述为由可编程处理器293执行的过程可分布在多个可编程处理器上,而不论每个此类可编程处理器是口腔护理装置103、可编程装置105还是服务器107的一部分。变换后的传感器数据的分析可包含以下各项中的一者或多者:牙釉质白度评估305;在刷洗程序期间,头部257的参考表面261在口腔内的位置和定向确定307;评估刷洗压力309;对用户的口腔护理特性的评估311;以及执行对口腔内的有机物的标识和区分313。其它类型的分析也可由可编程处理器379执行。在其中光学传感器283定位在电动牙刷251的头部257中的实施例中,所述分析还可包含
生成口腔的3维地形图像。
125.在某些实施例中,标识和区分口腔内的有机物313的过程可集中于标识以及区分口腔硬组织、口腔软组织和斑块。在某些其它实施例中,标识口腔内的有机物313的过程还可包含标识和区分原卟啉、血液、水合或脱水的口腔软组织,以及牙釉质中可能存在的龋病。而在其它实施例中,标识口腔内的有机物313的过程可包含标识和区分其它类型的有机物。
126.口腔护理特性评估311可包含口腔健康特性、刷洗有效性特性和齿白度特性中的一者或多者。这些特性中的任何一个或多个可基于口腔内的单独区段或基于整个口腔来评估。在某些实施例中,口腔健康特性可包含软组织健康特性和硬组织健康特性中的至少一者。在某些实施例中,所述软组织健康特性可包含软组织着色特性、出血特性、血液氧化特性和组织水合特性中的至少一者。在某些实施例中,硬组织健康特性可包含龋齿特性和细菌存在特性中的至少一者。在某些实施例中,刷洗有效性特性可包含刷洗压力特性、行程频率特性、细菌存在特性和龋齿特性中的至少一者。
127.在分析变换后的传感器数据之后,可编程处理器293可将控制反馈315传送到可编程处理器277。在某些实施例中,控制反馈315可包含可编程处理器277出于控制多个传感器中的一个或多个传感器的操作的目的而使用的控制数据。例如,控制反馈315可以是激活或解除激活一个或多个传感器的信号。作为另一示例,控制反馈315可以是增加或减小一个或多个传感器生成传感器数据的速率的信号。在此示例性实施例中,控制反馈315还可包含可编程处理器277出于主动电机控制317以控制振动电机267的目的而使用的数据。在某些实施例中,主动电机控制器317包含在刷洗程序期间增加或减小振动电机267的行程频率。
128.同样在分析变换后的传感器数据期间或之后,可编程处理器277可将用户反馈319传送给用户。此用户反馈319可包含以下一个或多个:反映一个或多个评估的口腔护理特性的口腔护理得分321;在刷洗程序期间实时向用户提供的音频、视觉和/或触觉信号323;在刷洗程序期间获得的图像和/或视频325;以及对传感器数据和/或使用传感器数据执行的数据分析的建议或指示性表示327。在某些实施例中,可使用可编程装置105发出用作对用户的反馈的音频、视觉和/或触觉信号323。在某些实施例中,可控制振动电机,使得振动电机的振动频率和/或振幅用于在口腔护理程序期间向用户提供触觉信号。在某些实施例中,电动牙刷251可包含安装到手柄253的扬声器和/或led,使得可使用电动牙刷251来发出音频和/或视觉信号323。在某些实施例中,音频、视觉和/或触觉信号可向用户提供关于电动牙刷251的头部在口腔内的方位以及在该方位处的口腔健康特性的评估的实时信息。在某些实施例中,可通过将口腔护理系统101与语音辅助平台介接来生成音频信号。在此类实施例中,反馈319将由可编程处理器277传送到语音辅助平台,并且语音辅助平台将以口头语言的形式向用户提供音频反馈。
129.图8到9示出示为手动牙刷341的口腔护理装置103的第三示例性实施例。手动牙刷341包含手柄343、颈部345、头部347和多个牙齿清洁元件349。牙齿清洁元件349从头部347的参考表面351延伸,并且所述牙齿清洁元件可以上文所论述的任何方式附连到参考表面351。电路板353围封在手柄343内。电路板353以及手动牙刷341的所有其它电子部件由同样围封在手柄343内的可再充电电池355供电。可再充电电池355可通过将手动牙刷341的端部置于例如图2中所示的充电底座单元161的充电底座单元的插口中而进行再充电。在某些实
施例中,手动牙刷341可包含一次性电池而非可再充电电池355。除非在权利要求中明确阐述,否则用于向手动牙刷341的电子部件提供电力的电源的类型并不是对本发明的限制。
130.源按钮357操作性地耦合到电路板353,使得用户可控制到电路板353和手动牙刷341的其它电子部件的电力。手动牙刷341的其它电子部件包含至少一个可编程处理器319和多个传感器,并且这些其它电子部件中的每一者操作性地耦合到电路板353。电路板353充当电子连接件,使得所有电子部件可由可编程处理器359控制且由此可在口腔护理系统101的操作期间使用。包含在手动牙刷341中的每个传感器被配置成生成传感器数据,所述传感器数据被传送到可编程处理器359。可编程处理器359可被编程而以各种方式处理其接收的传感器数据,下文更详细地描述其中一些方式。
131.包含在手动牙刷341中的传感器包含惯性测量单元(imu)361、图像传感器363、光学传感器365和压力传感器367。在此示例性实施例中,imu361是微机电系统(mems),其为市场上容易获得的部件,并且包含加速度计、陀螺仪和磁强计。下文更详细地描述由imu 361和其它电子部件提供的功能。同样在此示例性实施例中,imu 361示出为包含在手动牙刷341的主体343内并且耦合到所述主体。然而,在某些实施例中,imu 361可在不丧失功能的情况下包含在颈部345或头部347内并且耦合到所述颈部或头部,即使来自imu 361的传感器数据经历的过程可能需要改变以便保持功能也如此。除非权利要求中另外明确阐述,否则imu 361耦合到手动牙刷341的方式以及imu的耦合位置不是对本发明的限制。
132.imu 361生成呈3轴线性加速度数据、3轴定向数据和3轴磁强计数据的形式的传感器数据。imu 361的某些实施例可生成额外类型的传感器数据。来自imu 361的线性加速度数据、定向数据和磁强计数据进一步由口腔护理系统101以下文更详细地描述的方式处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
133.使用线性加速度数据、定向数据和磁强计数据,imu 361可用于建立用于手动牙刷341的装置坐标系。与图2所示的口腔护理装置151类似,手动牙刷341的装置坐标系的x轴限定为手动牙刷341的纵向轴线,z轴由向下重力限定,并且y轴限定为与x轴和z轴正交的轴线。如下文更详细地描述,通过生成变换后的传感器数据,其中定向数据以角定向系统表示,口腔护理系统101有助于确定手动牙刷341的头部347在用户的口腔内的位置和定向。在某些实施例中,变换后的传感器数据还包含形成由包含为手动牙刷341的部分的多个传感器中的任一传感器生成的传感器数据的部分的所有非变换后类型的数据。在某些实施例中,定向数据变换成以四元数单位表示。在其它实施例中,定向数据变换成以欧拉角表示。
134.图像传感器363被配置为相机,其物镜面向从头部347的参考表面351延伸的牙齿清洁元件349。图像传感器363操作性地连到电路板353,使得图像传感器363可由可编程处理器359控制。图像传感器363以机械方式耦合到手柄343的内部,并且手柄343包含开口369,图像传感器363可在手动牙刷341不在使用中时通过所述开口捕捉牙齿清洁元件349的图像。当在刷洗程序期间使用手动牙刷341时,图像传感器363能够捕捉用户嘴部的图像。此类图像还可包含用户面部嘴部周围的部分。在示例性实施例中,图像传感器363可具有设置在牙齿清洁元件349与手柄343中的开口369之间的点处的固定焦距。在此类实施例中,图像传感器363不需要花费任何时间调整焦点以适应不同深度的图像。在某些其它实施例中,图像传感器363可设置成在两个不同的焦距之间切换,第一焦距在牙齿清洁元件349距手柄343中的开口369的距离处,并且第二焦距在牙齿清洁元件349距手柄343中的开口369的约
一半距离处。在此类实施例中,图像传感器363可在大部分操作期间默认为第二焦距,然后在某些触发事件后切换到第一焦距,例如在下文中进一步详细描述。
135.图像传感器363的技术规格可被选择为适合口腔护理系统101的特定需求或使用,并且此类技术规格可与上文关于口腔护理装置151的图像传感器169所论述的相同。图像传感器363因此可包含广泛范围的配置和功能选项,并且除非在权利要求中明确陈述,否则图像传感器363的配置和功能不受限制。
136.图像传感器363生成图像数据形式的传感器数据。此图像数据由口腔护理系统101以下文更详细地描述的方式进一步处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
137.光学传感器365位于手动牙刷341的手柄343内,并且操作性地耦合到电路板353,使得光学传感器365可由可编程处理器359控制。在此示例性实施例中,光学传感器365还直接以机械方式耦合到电路板353。在某些实施例中,光学传感器365可位于手动牙刷341的手柄343、颈部345或头部347内的其它地方,并且尽管光学传感器保持操作性地耦合到电路板359,但光学传感器365不需要直接以机械方式耦合到电路板359。光学传感器365结合设置在头部347中的光模块371操作。
138.光模块371充当光发射器和光收集器,并且定位成使得从光模块371发射的光被引导通过在参考面351中形成的光学孔口373。类似地,光学反馈可通过光学孔口373进入头部347,并且由光模块371收集。牙齿清洁元件349形成有围绕光学孔口373的间隙377,以便1)为在刷洗程序期间从光模块371发射的光提供清晰路径以从头部347传出以入射到用户的口腔内的有机物上,以及2)接收光学反馈,所述光学反馈是所述有机物响应于被从光模块371发射的光照射而反射和/或发荧光的光。
139.由光模块371收集的光学反馈通过光导375引导到光学传感器365,所述光导以光学方式将光模块371耦合到光学传感器365。在某些实施例中,光导375可以是宽带光纤。光模块371包含光源,所述光源可以是类似于图21b中所示的用于发射一个或多个波段中的光的多个led,所述波段被选择为适合在刷洗程序期间通过与用户口腔内的有机物的相互作用来生成所需的光学反馈。在示例性实施例中,发射的光的波段包含可见光谱中的光和可见光谱的紫光范围中的光中的至少一者。在某些实施例中,可见光谱中的光跨越基本上所有宽带可见光谱,从约390nm的波长延伸到约2300nm的波长。在某些实施例中,此宽带可见光谱可从约450nm的波长延伸到约1000nm的波长。在某些实施例中,可见光谱的紫光范围中的光可以是以405nm波长为中心的窄带光谱。
140.光模块371操作性地耦合到电路板353,使得来自光模块371的光的发射可由可编程处理器359控制。在某些实施例中,来自一个或多个led的光可通过第二光导引导到光模块371。而在其它实施例中,光传感器365可定位在光模块371内。
141.可选择光学传感器365的技术规格以适应口腔护理系统101的特定需求或使用。在某些实施例中,光学传感器365可被配置成以约10hz的速率输出光学传感器数据。在某些其它实施例中,可使用更高或更低的数据速率来输出光学传感器数据。在此示例性实施例中,光学传感器365可以是ccd、cmos或具有足够像素分辨率的其它类型的电子图像捕捉装置,以使用在刷洗程序期间接收的光学反馈来捕捉用户口腔内的图像或视频。在此类实施例中,光学传感器365可被配置成以每秒1到90帧的帧速率捕捉图像。另外,在此类实施例中,
光学传感器365的分辨率可在约30x30像素与5000x5000像素之间。在某些其它实施例中,像素阵列可包含总共约900个像素到总共约2500万个像素,并且此类像素阵列可以是正方形阵列或非正方形阵列。在某些实施例中,光学传感器365可以是彩色相机、单色相机、色调感测相机和近红外相机中的任一者。在某些其它实施例中,光学传感器365可包含一个或多个滤波器以提供所需波长的滤波。在某些实施例中,光学传感器365可以是ccd相机、cmos相机或任何其它类型的电子图像捕捉装置。在某些实施例中,光学传感器365可定位在头部347中,并且产生已知散射图案的漫射器、图案化掩模或微透镜阵列可放置在光学传感器365的前面,使得可编程处理器359(或与口腔护理系统101相关联的任何其它处理器)能够从穿过漫射器、图案化掩模或微透镜阵列的光学反馈生成3维地形图像。
142.在某些实施例中,光学传感器365可以是在可见波段和近红外波段中的一者或两者中操作的64通道8x8像素阵列集成光谱仪。在此类实施例中,光学传感器365不太可能用于捕捉图像数据或用于从光学反馈生成3维地形图像。
143.光学传感器365生成包含图像数据的光学传感器数据形式的传感器数据。来自光学传感器365的图像数据可按与来自图像传感器363的图像数据相同的方式处理。此光学传感器数据由口腔护理系统101进一步处理为传感器数据的一部分。
144.在某些实施例中,可从手动牙刷341中排除光学传感器365。然而,应注意,光学传感器365的排除必定限制口腔护理系统101的功能。在某些实施例中,手动牙刷365还可包含额外传感器,可包含每个额外传感器以向口腔护理系统101添加其它的功能。除非在权利要求中明确阐述,否则包含特定类型或类别的传感器,或相反地,排除特定类型或类别的传感器,并不是对本发明的限制。
145.压力传感器367操作性地耦合到电路板353并且设置在颈部345中。在此示例性实施例中,压力传感器367呈弯曲传感器(flex sensor)的形式,其基于颈部345在刷洗程序期间是否弯曲以及弯曲程度向可编程处理器359提供传感器数据。在某些其它实施例中,压力传感器367可设置在头部347中并且呈应变传感器的形式。在此类示例性实施例中,压力传感器367基于刷洗程序期间头部347上是否存在应变以及应变大小而向可编程处理器359提供传感器数据。
146.压力传感器367生成压力传感器数据形式的传感器数据。此图像压力传感器数据由口腔护理系统101以下文更详细地描述的方式进一步处理为传感器数据的一部分,以帮助为口腔护理系统101的用户提供增强的口腔护理。
147.图10示出当使用手动牙刷341作为图1的口腔护理系统101的一部分时的数据流和控制信号。所示数据流包含来自多个传感器的原始传感器数据、变换后的传感器数据,以及提供给用户和口腔护理系统101的其它部件的反馈。如前所指示,可编程处理器359操作性地耦合到手动牙刷341的imu361、图像传感器363、光学传感器365、光模块371和压力传感器367中的每一者,并且这些前述部件中的每一者被包含为手动牙刷341的一部分。可编程处理器359通过有线或无线连接以可通信方式与可编程处理器379耦合,所述可编程处理器在此示例性实施例中是可编程装置105的一部分。在某些实施例中,可编程处理器379还以可通信方式耦合到服务器107的可编程处理器(未示出)。
148.imu 361包含3轴加速度计381、3轴磁强计383、3轴陀螺仪385和内部校准单元387。在某些实施例中,imu 361还可包含可用于实现与可编程装置105的可编程处理器379的直
接无线通信的无线通信模块。加速度计381生成基于x、y、z坐标的3轴线性加速度数据,并且所述线性加速度数据被引导到校准单元387和可编程处理器359两者。磁强计383生成3轴磁方向数据,并且所述磁方向数据被引导到校准单元387。陀螺仪385生成基于x、y、z坐标的3轴定向数据,并且所述定向数据被引导到校准单元387和可编程处理器359两者。校准单元387使用来自磁强计383的传感器数据对来自加速度计381和陀螺仪385的传感器数据进行定向,使得来自两方的传感器数据与装置坐标系对准。
149.图像传感器363生成图像数据,并且所述图像数据被引导到可编程处理器359。在示例性实施例中,图像数据可以是两种类型中的一种。第一类型是表示在刷洗程序期间生成的口腔的外部图像的图像数据。第二类型是表示在刷洗程序之外的时间生成的牙齿清洁元件349的图像的图像数据。在某些实施例中,图像传感器363可用于生成除上述两种类型之外的图像数据。
150.光学传感器365生成光学传感器数据,并且所述光学传感器数据被引导到可编程处理器359。在此示例性实施例中,光学传感器数据表示来自光模块371的光入射到用户口腔内的有机物上而产生的光学反馈。当来自光模块371的光入射到有机物上时,光学反馈可以是反射光或荧光中的一者。在某些实施例中,光学传感器365可与头部347一起定位,并且通过例如漫射器、图案化掩模或微透镜阵列等具有已知散射图案的光散射元件接收光学反馈。在此类实施例中,光学传感器数据可包含也从光学反馈生成的3维地形图像数据。
151.在某些实施例中,光学传感器365可受益于常规色彩校准。在此类实施例中,来自光模块371的光从具有已知色彩或色彩方案的校准表面的反射可用于将光学传感器365校准到建立的标准。在某些实施例中,校准表面可并入为用于牙齿清洁元件349的盖的一部分。
152.可编程处理器359从每个传感器接收传感器数据,并对所述传感器数据执行数据融合和变换过程391。此数据融合和变换过程生成变换后的传感器数据。作为此变换过程的一部分,定向数据以角定向系统表示。在示例性实施例中,定向数据变换成以四元数单位表示。在其它实施例中,定向数据变换成以欧拉角表示。在示例性实施例中,变换后的传感器数据还包含传感器数据的所有非变换部分,使得所有收集的传感器数据组合或融合在一起到分组中,由此促进对所有所收集传感器数据作为整体的进一步分析。另外,传感器数据的主要部分在数据分析过程期间可具有其它个别效用。在某些实施例中,可编程处理器379可执行一些或全部数据融合和变换过程。
153.可编程处理器359将融合和变换后的传感器数据传送到可编程处理器379以供分析。如所示,可编程处理器379被包含为可编程装置105的一部分。然而,在某些实施例中,可编程处理器379可被包含为服务器107的一部分。而在其它实施例中,本文中描述为由可编程处理器379执行的过程可分布在多个可编程处理器上,而不论每个此类可编程处理器是口腔护理装置103、可编程装置105还是服务器107的一部分。变换后的传感器数据的分析可包含以下各项中的一者或多者:牙釉质白度评估393;在刷洗程序期间,头部347的参考表面351在口腔内的位置和定向确定397;评估刷洗压力399;对用户的口腔护理特性的评估401;以及执行对口腔内的有机物的标识和区分403。在其中光学传感器365定位在电动牙刷341的头部347中的实施例中,所述分析还可包含生成口腔的3维地形图像405。其它类型的分析也可由可编程处理器379执行。
154.在某些实施例中,标识和区分口腔内的有机物403的过程可集中于标识以及区分口腔硬组织、口腔软组织和斑块。在某些其它实施例中,标识口腔内的有机物403的过程还可包含标识和区分原卟啉、血液、水合或脱水的口腔软组织,以及牙釉质中可能存在的龋病。而在其它实施例中,标识口腔内的有机物403的过程可包含标识和区分其它类型的有机物。
155.口腔护理特性评估401可包含口腔健康特性、刷洗有效性特性和齿白度特性中的一者或多者。这些特性中的任何一个或多个可基于口腔内的单独区段或基于整个口腔来评估。在某些实施例中,口腔健康特性可包含软组织健康特性和硬组织健康特性中的至少一者。在某些实施例中,所述软组织健康特性可包含软组织着色特性、出血特性、血液氧化特性和组织水合特性中的至少一者。在某些实施例中,硬组织健康特性可包含龋齿特性和细菌存在特性中的至少一者。在某些实施例中,刷洗有效性特性可包含刷洗压力特性、行程频率特性、细菌存在特性和龋齿特性中的至少一者。
156.在分析变换后的传感器数据之后,可编程处理器379可将控制反馈407传送到可编程处理器359。在某些实施例中,控制反馈407可包含可编程处理器359出于控制多个传感器中的一个或多个传感器的操作的目的而使用的控制数据。例如,控制反馈407可以是激活或解除激活一个或多个传感器的信号。作为另一示例,控制反馈407可以是增加或减小一个或多个传感器生成传感器数据的速率的信号。
157.同样在分析变换后的传感器数据之后,可编程处理器379可将用户反馈409传送给用户。此用户反馈409可包含以下一个或多个:反映一个或多个评估的口腔护理特性的口腔护理得分411;在刷洗程序期间传给用户的音频和/或视觉信号413;在刷洗程序期间获得的图像和/或视频415;以及对传感器数据和/或使用传感器数据执行的数据分析的建议或指示性表示417。在某些实施例中,可使用可编程装置105发出用作对用户的反馈的音频和/或视觉信号413。在某些实施例中,手动牙刷341可包含安装到手柄303的扬声器和/或led,使得可使用手动牙刷341来发出实时音频和/或视觉信号413。在某些实施例中,音频和/或视觉信号可向用户提供关于口腔护理装置103的头部在口腔内的方位以及在该方位处的口腔健康特性的评估的实时信息。在某些实施例中,可通过将口腔护理系统101与语音辅助平台介接来生成音频信号。在此类实施例中,反馈409将由可编程处理器379传送到语音辅助平台,并且语音辅助平台将以口头语言的形式向用户提供音频反馈。
158.图11a示出用户的口腔421,但周围没有面部组织或特征。口腔421包含牙齿形式的口腔硬组织423和牙龈形式的口腔软组织425。如上所述,口腔护理系统101将用以在口腔护理装置的参考面定位在口腔软组织425上方时做出区分。如下文将更详细地描述,在电动牙刷实施例中,口腔护理系统101能够改变振动电机的行程频率,以便顾及被刷洗的口腔组织423、425的类型。举例来说,当牙齿清洁元件定位在口腔硬组织上方且需要额外刷洗时,口腔护理系统101能够改变电动牙刷实施例中的振动电机的行程频率。另外,在电动牙刷实施例中,当用户在刷洗程序期间施加过多压力或过少压力时,口腔护理系统101能够改变振动电机的行程频率,以便增加刷洗程序的有效性。
159.图11b示出典型用户的上下牙427的布局视图。为了使口腔护理系统有效地操作,将牙齿分成如下描述并以区段号标记的16个区段:右下外侧(bro)s1;右下顶部(brt)s2;右下内侧(bri)s3;下前侧(bf)s4;下后侧(bb)s5;左下内侧(bli)s6;左下顶部(blt)s7;左下
外侧(blo)s8;左上外侧(tlo)s9;左上底部(tlb)s10;左上内侧(tli)s11;上前侧(tf)s12;上后侧(tb)s13;右上内侧(tri)s14;右上底部(trb)s15;以及右上外侧(tro)s16。将在下文描述中引用区段号。如可看出,口腔的四个角落中的每一个具有三个区段,并且口腔的前部具有四个区段。对于每个角落,每个区段分别由磨牙和双尖牙的顶部、内侧和外侧表面限定。对于前部,每个区段由上下门牙的前侧和后侧限定。
160.图12示出针对口腔护理系统101处理传感器数据的方式。虽然结合图2的口腔护理装置151描述此过程,但显而易见的是,此同一过程还适用于图5和8的牙刷251、341以及权利要求书范围内的任何其它实施例。此同一过程可用于确定参考面在口腔内的位置和定向、在自由式口腔护理程序期间主动地控制电动牙刷实施例中的振动电机、评估口腔护理特性并针对其提供反馈,以及基于实际磨损确定牙齿清洁元件何时准备好进行推荐的更换。
161.如本文所用,当此过程结合体现为牙刷的口腔护理装置使用时,口腔护理程序可被称为刷洗程序。类似地,自由式口腔护理程序可被称为自由式刷洗程序,并且训练口腔护理程序可被称为训练刷洗程序。
162.此过程从包含imu 433、光学传感器435和图像传感器437的多个传感器生成传感器数据开始。所述过程可使用所有传感器数据或其任何子集。如已论述,在imu 433内,陀螺仪439生成基于x、y、z坐标的3轴定向数据,磁强计41生成3轴磁方向数据,并且加速度计443生成基于x、y、z坐标的3轴线性加速度数据。为了说明如上所描述的全套传感器,示出压力传感器445,然而,如前所论述,加速度计443可用于测量牙齿清洁元件在口腔内口腔组织上的压力。光学传感器435生成显示光学反馈的光谱的光学传感器数据,并且图像传感器437生成图像数据,所述图像数据表示在口腔护理程序期间用户嘴部外部的图像和在口腔护理程序期间之外的时间的牙齿清洁元件121的图像。
163.定向数据447和线性加速度数据449都由磁方向数据451告知,以便从使用磁方向作为参考方向的每一数据生成3维定向数据453和3维线性加速度数据455。3维定向数据453和3维线性加速度数据455由数据融合和变换过程步骤431接收。类似地,由光学传感器435和图像传感器437中的每一者生成的传感器数据也由数据融合和变换过程步骤431接收。在数据融合和变换过程步骤431中,来自所有传感器的传感器数据被布置成使得来自每个传感器的传感器数据与来自其它传感器中的每一者的同期传感器数据相关联。另外,3维定向数据被变换成使得其以角定向系统表示。在示例性实施例中,角定向系统是四元数单位。在某些实施例中,角定向系统可以是欧拉角。在四元数单位中,角定向和旋转以w、x、y、z变量表示,其中w在-1到1的范围内并且指示旋转,并且两个全旋转跨越w变量的整个范围。
164.图32到33a
–
d示出可由可编程处理装置165执行以从定向数据和由图像传感器437生成的图像数据生成增强的图像数据的过程的实施例。在某些实施例中,在数据融合和变换步骤431期间执行这个生成增强的图像数据的过程(参见图12)。图32示出可用于生成增强的图像数据的过程的流程图801。此过程的第一步骤803是从各种传感器生成传感器数据,如上文详细描述。出于流程图801的过程的目的,所述传感器数据包含定向数据和图像数据两者。如上文所描述,定向数据由imu 433生成,并且传感器数据由图像传感器437生成。此过程的第二步骤805是从传感器数据生成变换后的传感器数据。出于流程图801的过程的目的,变换后的传感器数据包含变换后的定向数据和增强的图像数据,并且类似于上
述过程,这些数据变换可在数据融合和变换步骤431中发生。同样如上所描述,变换后的定向数据可呈四元数单位或欧拉角形式。为了便于描述,参考呈四元数单位的变换后的定向数据对生成增强的图像数据进行以下描述。
165.在此实施例中,如上所描述,生成变换后的传感器数据,另外x、y、z变量也在-1到1的范围内,使得由这些变量限定的向量作为四元数数据的一部分具有单位长度。如图13和下文所附描述所指示,x相对于w的标绘图可帮助确定口腔护理装置在口腔中的方位和定向。此外,如本文所述,来自图像传感器的图像可帮助解决可能由x与w的分析导致的方位和定向上的任何模糊性。因此,增强的图像数据表示由图像传感器生成的口腔外部图像与四元数数据的w和x变量的表示的组合,使得每个外部图像与对应变换后的定向数据的表示并且尤其是与四元数数据的对应w和x变量的表示组合。因此,增强的图像包含(多个)可编程处理器确定口腔护理装置头部在口腔内的位置和定向所需的所有信息。在某些实施例中,外部图像与对应变换后的定向数据的表示的组合可使得外部图像与对应变换后的定向数据的表示并排显示。在某些其它实施例中,外部图像与对应变换后的定向数据的表示的组合可使得对应变换后的定向数据的表示被添加为外部图像的覆盖层。在此类实施例中,变换后的定向数据的表示的覆盖层可定位在外部图像上,使得所述覆盖层出现在外部图像的拐角中,并且不干扰每个增强的图像的外部图像部分的后续分析。
166.在使用第一可编程处理器生成此类经增强的图像数据的某些实施例中,第一可编程处理器可仅将运动数据和增强的图像数据发送到第二可编程处理器,以在所有口腔护理程序期间进行进一步处理和分析,如本文中所描述。在此类实施例中,可从此类发送中省略变换后的定向数据,因为增强的图像数据包含足够的信息以确定口腔护理装置在口腔内的定向和位置。在某些其它实施例中,第一可编程处理器可在训练口腔护理程序期间将所有变换后的传感器数据发送到第二可编程处理器,然后在后续自由式口腔护理程序期间仅将运动数据和增强的图像数据发送到第二可编程处理器。
167.图33a
–
d示出可与外部图像组合以生成增强的图像数据的四元数数据的表示的若干实施例。图33a示出包含上弧813和下弧815这两个部分弧的变换后的定向数据的表示811(其在这些实施例中是四元数数据)的实施例。上弧813编码w变量,而下弧815编码x变量。上弧813在弧长内对w变量进行编码,其中弧长0表示w=-1,弧长90
°
表示w=0,并且弧长180
°
表示w=1。这三个点中的任何两个点之间的弧长可使用这些预定点中的一个或多个点来在对增强的图像数据的后续分析期间估计w的值。类似地,下弧815在弧长内对x变量进行编码,其中弧长0表示x=-1,弧长90
°
表示x=0,并且弧长180
°
表示x=1。同样,这三个点中的任何两个点之间的弧长可使用这些预定点中的一个或多个点来在对增强的图像数据的后续分析期间估计x的值。仅为了便于描述而在此处使用弧813、815的定向。当变换后的定向数据的表示811用于生成增强的图像数据时,变换后的定向数据的表示811可与外部图像组合,使得其具有一致定向。所述一致定向不需要与如图33a中所示的变换后的定向数据的表示811的定向有任何相关性。
168.图33b示出包含形成网状图案的两个竖直线823和两个水平线825的变换后的定向数据的表示821(同样是四元数数据)的第二实施例。在此实施例中,两个竖直线823通过分隔两个竖直线的距离来编码w变量,并且两个水平线825通过分隔两个水平线825的距离来编码x变量。包含两个斑点(spot)827,这两个斑点具有相同直径,其中一个斑点置于两个竖
直线823之间等距处,而另一个斑点置于两个水平线825之间等距处。两个竖直线823之间的斑点827可处于两个预定固定方位中的一个方位中,一个方位在水平线825上方,而另一个方位在水平线825下方。类似地,两个水平线之间的斑点827可处于两个预定固定方位中的一个方位中,一个方位在竖直线823上方,而另一个方位在竖直线823下方。
169.此布置有能力完全编码w和x变量两者。当两个竖直线823的间距等于斑点827的直径时,则w=0。当两个竖直线823相隔一定距离,其中一个竖直线与两个水平线825之间的斑点827相切时,则w=1。当两个竖直线823在这两个极端之间的中间时,则w=0。这三个点中的任何两个点之间的两个竖直线823的相隔距离可使用这些预定位置/值中的一者或多者来在对增强的图像数据的后续分析期间估计w的值。当斑点827在两个水平线825下方的预定固定方位时(如所示),则w是负数,并且当斑点827在两个水平线825上方的预定固定方位时,w是正数。x变量以类似方式编码。当两个水平线825的间距等于两个水平线825之间的斑点827的直径时,则x=0。当两个水平线825相隔一定距离,其中一个水平线与两个竖直线823之间的斑点827相切时,则x=1。当两个水平线825在这两个极端之间的中间时,则x=0。这三个点中的任何两个点之间的两个水平线825的相隔距离可使用这些预定位置/值中的一者或多者来在对增强的图像数据的后续分析期间估计x的值。当斑点827在两个竖直线823下方的预定固定方位时(如所示),则x是正数,并且当斑点827在两个竖直线823上方的预定固定方位时,x是负数。
170.图33c示出呈qr代码形式的变换后的定向数据的表示829(同样是四元数数据)的第三实施例。由于qr码是可用于以图形格式存储数据的已知结构,因此使用起来方便。由于qr码的构建在涉及此类编码图形的领域中是众所周知的,因此本文不论述将w和x变量编码为变换后的定向数据的表示829的过程。
171.图33d示出变换后的定向数据931的表示(同样是四元数数据)的第四实施例,其中w和x变量被编码成修改后的交叉影线图案的线。在此实施例中,变换后的定向数据的表示931由两个竖直边界线833和两个水平边界线835界定。修改后的交叉影线图案包含具有第一线宽的第一系列平行线837和具有第二线宽的第二系列平行线839。每一系列平行线837、839的线宽在与一个外部图像组合或叠加时使得彼此在视觉上可区分。第一系列平行线837表示w变量,并且第二系列平行线839表示x变量。
172.第一系列平行线837相对于竖直边界线833的角度表示w的值,使得当第一系列平行线837平行于竖直边界线833时,w=1,并且当第一系列平行线837垂直于竖直边界线833时,w=0。当第一系列平行线837处于这三个预定义角度中的任意两个角度之间的角度时,第一系列平行线837相对于这些预定义角度中的一个或多个角度的角度可用于在增强的图像数据的后续分析期间估计w的值。另外,当左侧竖直边界线833为实线时,w为负,并且当右侧竖直边界线833为实线时,w为正。竖直边界线833在任何单个表示中均不是实线或均为非实线。
173.类似地,第二系列平行线839相对于水平边界线835的角度表示x的值,使得当第二系列平行线839平行于水平边界线835时,x=1,并且当第二系列平行线839垂直于水平边界线835时,x=0。当第二系列平行线839处于这三个预定义角度中的任意两个角度之间的角度时,第二系列平行线839相对于这些预定义角度中的一个或多个角度的角度可用于在增强的图像数据的后续分析期间估计x的值。另外,当上侧水平边界线835为实线时,x为正,并
且当下侧水平边界线835为实线时,x为负。水平边界线835在任何单个表示中均不是实线或均为非实线。
174.值得注意的是,图33a-d仅示出变换后的定向数据的表示的示例性实施例。w和x四元数数据的任何图形表示都可用来生成增强的图像数据。因此,除非权利要求书中另外明确陈述,否则变换后的定向数据的表示不受限制。
175.在定向传感器数据变换后(并且在某些实施例中,已生成增强的图像数据)并且所有传感器数据融合的情况下,除了变换后的定向数据之外还可包含所有生成的传感器数据的所述变换后的传感器数据被传送到机器学习算法461。此机器学习算法461是能够在数据集中找到共同特征的深度学习算法。当然,与所有机器学习一样,所述算法必须首先用训练数据进行训练。因此,过程具有训练阶段和日常使用阶段。用于日常使用的算法分支需要经过充分训练,之后将在用户的常规自由式口腔护理程序期间正确工作。
176.在训练阶段,训练所述算法以寻找每个分类数据集中数据的共同特征。在训练口腔护理程序期间采集大量样本数据,包含来自所有传感器的传感器数据和变换后的定向数据。训练口腔护理程序是导引式程序,其中要求用户在口腔的一个区段中开始,刷洗预定时间段(例如,在口腔的每个区段中刷5到10秒),然后继续刷洗口腔的下一指示区段。
177.作为此深度学习过程的一部分,期望在训练口腔护理程序期间生成和分析传感器数据,所述传感器数据包含来自图像传感器169的关于口腔的每个区段的500多个图像。由于来自口腔的每个区段的图像被分组为传感器数据的一部分,所述传感器数据还包含变换后的定向数据,因此机器学习算法能够更有效地标识传感器数据内的共性和相关性。随着深度学习在训练过程期间进行,深度学习算法执行特征标识和提取467,以便标识指示数据内的共享共性的那些特征。此类深度机器学习在例如机器人等其它技术领域中是众所周知的,因此在本文中不以任何显著细节进行论述。
178.通过继续进行导引式训练口腔护理程序,用户能够在刷洗口腔的每个区段时从每个区段生成数百或在必要时甚至数千个图像和传感器数据。通过这些众多图像,深度学习算法能够标识从口中不同区段获取的图像之间的细微差异。然而,仅这些图像并不能提供足够的背景以能够确定检查装置151的头部115在用户的口腔内的位置和定向。然而,在通过深度学习算法结合图像进行分析后,四元数单位能够提供所述背景。
179.图13是表示在口腔护理程序期间获得的四元数单位的w与x的图形501。此图示出来自口腔的许多区段的变换后的传感器数据与其它区段数据充分分开,由此当传感器数据生成时,可根据口腔护理程序中头部所在的区段来轻松标识和分类所述数据。此外,如果来自口腔的这些区段的变换后的传感器数据在图501上可容易标识,则当通过深度机器学习算法分析变换后的传感器数据时,这些区段也将突显。变换后的传感器数据中突显并且与其它区段充分分离的区段包含:sq2、sq5、sq7、sq10、sq13和sq15。
180.从此图501可明显看出的另一件事是,来自某些区段的变换后的传感器数据未与来自其它区段的传感器数据充分分开,并且所有这些紧密分组的传感器数据区段成对。如图14a
–
e所示的这些变换后的传感器数据对彼此重叠或太近而难以轻松辨别哪个组属于口腔的哪个区段。这些对包含:sq3和sq14,如图14a的图503所示;sq8和sq9,如图14b的图505所示;sq4和sq12,如图14c的图507所示;sq1和sq11,如图14d的图509所示;以及sq6和sq16,如图14e的图511所示。
181.即使这些分组对彼此太近而不能仅基于变换后的传感器数据轻松区分,但一旦深度机器学习算法结合从图像传感器169获得的图像数据来处理这些分组对,就可加以区分。此外,一旦能可靠地确定头部115的参考面153在口腔内的位置和定向,来自其它传感器的数据就可被更有利地使用。
182.作为比较,图15是示出当imu传感器数据433变换成欧拉角时x与z的比较的图513。此图513展示,将定向数据变换到欧拉角还可在口腔的若干不同区段之间产生变换后的传感器数据的区分。因此,当与来自图像传感器169的图像数据组合并使用深度机器学习分析处理时,将定向数据变换到欧拉角使得能够标识和区分口腔的不同区段。通过对比比较,图16是示出来自磁强计数据的x与z的比较的图515。虽然一些imu传感器数据集群与其它集群分离,但其中若干又过于接近而无法在缺少能够实现这种区分的额外传感器数据的情况下对所述集群进行区分。然而,即使添加来自图像传感器169的图像数据,图形515中具有重叠数据的区段也不易辨别。这是因为具有重叠数据的区段,例如s1和s16,在口腔内都彼此如此接近,以致图像数据无法用于提供足够的区分。
183.回到图12,在训练口腔护理程序提供用于分析的口腔护理程序数据的情况下,可创建分类算法469。然后,用户可利用口腔护理系统101和机器学习来准确跟踪头部115的参考面153在自由式口腔护理程序471期间的位置和定向。在特征标识和提取步骤473中,标识用户希望跟踪的口腔护理特征,并且从变换后的传感器数据提取相关数据。一旦标识出口腔护理特征,就可从变换后的传感器数据中提取跟踪选定特征所必要的数据。然后,将基于对来自训练口腔护理程序的口腔护理程序数据的分析的分类算法应用475于提取的数据以确定所述提取的数据是否适合所建立的分类。然后,将提取的数据是否适合分类并入到分类数据的分析479中。分析之一是确定头部115的参考面153在口腔中的位置和定向。口腔护理系统101可进一步向用户提供众多的口腔护理评估,其示例在下文详述。有利地,可逐区段地、基于区段的组合或甚至基于对整个口腔的评估来提供对口腔护理的评估。应注意,当结合尤其是光学传感器数据等传感器数据的其它方面应用时,通过非常确定地知道头部115的参考面153在口腔内的位置和定向而提供的优势有望提供许多口腔健康益处,甚至超出本文所论述的益处。然而,除非在权利要求中明确如此限制,否则本发明不限于对口腔护理或口腔健康的任何特定评估。
184.图17a是示出用于主动地控制图5的电动牙刷251的振动电机267以有利于改善用户口腔健康的过程557的图。过程557在单独使用时仅基于光学传感器数据。然而,在典型的刷洗程序期间,将很少单独使用过程557。在实践中,此过程557和其产生的结果将与用户的其它过程和口腔健康历史以及现有需求达成平衡。
185.过程557使用从口腔内的某些有机物反射的光学反馈553和由口腔内的某些有机物发荧光的光学反馈555,所述光学反馈都是光学传感器数据的一部分,以便确定如何控制振动电机的行程频率。举例来说,牙齿上存在暗点可以是在牙釉质中是否存在龋病的指示,并且此类暗点将在由图像传感器反射和接收的光学反馈中显示。类似地,举例来说,荧光光学反馈中红色荧光的存在可以是牙齿上存在斑块的指示。在每种情况下,期望增加振动电机267的行程频率。
186.使用上文所论述的深度机器学习过程来执行反射光学反馈中暗点的存在的评估和荧光光学反馈中红色荧光的存在的评估。通过使用机器学习过程通过反射光和荧光评估
口腔中的口腔组织或其它有机物的状态,口腔护理系统101可在刷洗程序期间实时地对口腔的状态作出响应。例如,如果情况有需要,则通过使用机器学习过程,口腔护理系统101可每半秒或甚至在更短时间增加或减小振动电机的行程频率。如果振动电机的行程频率约为200hz,则每半秒向上调整5hz的行程频率可显著地改变用户牙齿上的潜在问题点被施加的额外行程数。类似地,可向下调节行程频率以帮助防止过度刷洗。除非在权利要求中明确阐述,否则通过本文公开的任何过程对行程频率进行的调整量不受限制。
187.使用反射的光学反馈553,过程557确定在反射的光学反馈中是否检测到高于预定阈值的暗点557。此阈值可基于预先存在的标准,或者所述阈值可基于由用户提供的训练数据。在未检测到高于预定阈值的暗点的情况下,则将行程频率维持在当时的频率下559。在检测到高于预定阈值的暗点的情况下,则将振动电机的行程频率增加小的增量561。在增加561之后,对照频率阈值563检查行程频率。如果行程频率不高于频率阈值,则过程557返回到确定是否在反射光学反馈中检测到高于预定阈值的暗点557。过程557可继续根据算法内设置的标准酌情增加行程频率。如果行程频率处于或高于频率阈值,则过程557将行程频率复位到基础或基本频率,之后过程557返回到确定是否在反射光学反馈中检测到高于预定阈值的暗点557。
188.使用发荧光的光学反馈571,过程557确定在荧光光学反馈中是否检测到高于预定阈值的红色荧光571。此阈值可基于预先存在的标准,或者,其可基于由用户提供的训练数据。在未检测到高于预定阈值的红色荧光的情况下,则将行程频率维持在当时的频率下573。在检测到高于预定阈值的红色荧光的情况下,则将振动电机的行程频率增加小的增量561。在增加577之后,对照频率阈值579检查行程频率。如果行程频率不高于频率阈值,则所述过程返回到确定是否在荧光光学反馈中检测到高于预定阈值的红色荧光571。如果行程频率处于或高于频率阈值,则过程557将行程频率复位为基础或基本频率,之后过程557返回到确定是否在荧光光学反馈中检测到高于预定阈值的红色荧光571。
189.在某些实施例中,当检测到牙齿上的污渍时,可使用类似于过程571的过程来增加振动电机的行程频率。振动电机的行程频率的调整也可用于出于多种其它原因提高刷洗有效性。在某些实施例中,口腔中的其它类型的可检测特征可用于增加或减小振动电机的行程频率。除非权利要求书中明确阐述,否则可检测特征的类型不是对本发明的限制。
190.图17b是示出另一过程591的图,所述过程用于主动地控制图5的电动牙刷251的振动电机267,以有利于改善用户的口腔健康。过程591在单独使用时基于来自加速度计295和光学传感器283的传感器数据。在实践中,此过程591和其产生的结果将与用户的其它过程和口腔健康历史以及现有需求达成平衡。在某些实施例中,如果在电动牙刷251中包含单独的压力传感器,则此过程591也可基于压力传感器数据。
191.使用来自imu 279的传感器数据,特别是来自加速度计295的线性加速度数据,确定牙齿清洁元件259对用户口腔中的组织的压力。图18
–
22示出可从线性加速度数据确定压力的方式。图18是示出电动牙刷251中振动电机267的测得行程频率的图621。使用imu 279,特别是imu 279内的加速度计295执行行程频率的测量。图621中所示的振荡表示在刷洗程序期间由加速度计295测量的振动电机267的无抑制振动。图19是示出电动牙刷251中振动电机267的行程频率的另一测量值的图623。图623中所示的振荡表示在刷洗程序期间由加速度计295测量的振动电机267的部分抑制振动。部分抑制是由将牙齿清洁元件259按压到
用户的牙齿或牙龈而引起。图20是示出电动牙刷251中振动电机267的行程频率的另一测量值的图625。图625中所示的振荡表示在刷洗程序期间由加速度计295测量的振动电机267的显著抑制振动。显著抑制是由将牙齿清洁元件259显著按压到用户的牙齿或牙龈而引起。这种将牙齿清洁元件用力按压到用户的牙齿或牙龈可能导致对口腔组织的损坏。
192.图21示出绘示当通过设置在电动牙刷251的头部257中的imu 279测量行程频率时行程频率振幅与行程压力振幅的图627。图627中的曲线是典型的振动抑制曲线,其中行程频率的振幅与行程压力的振幅具有某种反比例(非线性)。图22示出同样绘示行程频率振幅与行程压力振幅的第二图629,此曲线不同之处在于,行程频率振幅由设置在电动牙刷251的手柄253中的imu 279测量。图629中的曲线与抑制测量值的可能预期相反,其中行程频率的振幅与行程压力的振幅具有某种直接比例性(同样,不是线性的)。机器学习过程将考虑这种差异。
193.返回图17b,过程591基于imu传感器数据593和光学传感器数据597两者。imu传感器数据,特别是线性加速度数据,用于确定用户在刷洗程序期间施加的行程压力595,并且光学传感器数据用于确定按压牙齿清洁元件259所针对的组织类型。使用上文论述的机器学习过程,过程591确定601所施加的行程压力对于所述组织类型来说是过高、过低还是可接受。如果施加的行程压力过高603,则过程591将减小行程频率。如果施加的行程压力过低605,则过程591将增加行程频率。在所施加的行程频率可接受的情况下,则过程591将使行程频率维持在当时的水平。
194.在某些实施例中,过程591还可考虑所标识组织类型位于用户口腔内的位置,并且再次使用机器学习过程,确定是增加、减小还是维持行程频率。
195.图23示出用于评估口腔护理系统101的用户的口腔护理特性的过程651。应理解,此过程651可与本文公开的任何实施例和本发明的任何其它实施例一起使用,并且过程651的实施可能受到与其一起使用的口腔护理装置103的特定配置限制。
196.可给口腔护理特性分配得分,并且每个此类分配得分可反映一个或多个口腔护理特性和/或口腔的一个或多个区段。过程651基于由光学传感器169接收的imu传感器数据653、图像传感器数据655、反射光学反馈657以及由光学传感器169接收的荧光光学反馈659。图24a示出检查装置151的头部115内的光模块173,示出用于生成反射光学反馈657和荧光光学反馈659两者的光模块173的部件。类似地,图24b示出电动牙刷251的头部257内的光模块285,示出用于生成反射光学反馈657和荧光光学反馈659两者的光模块285的部件。图25示出用于操作光模块173的部件的过程。在此示例性实施例中,光模块173包含两个宽带led 701和一个窄带led 703。在此示例性实施例中,宽带led 701发射在450nm到900nm范围内的光,而窄带led 703发射以405nm为中心的窄带光谱的光。从宽带led 701和窄带led 703两者发射的光被引导朝向并穿过光学孔口175。当头部115在口腔内时,发射的光穿过光学孔口175并且朝向有机物。在那里,来自宽带led 701的光大部分被有机物部分地反射和部分地吸收,而来自窄带led 703的光被一些有机物吸收,其中吸收的一些光能量作为荧光重新发射。至少一些反射光和一些荧光通过光学孔口175回来,分别成为反射光学反馈657和荧光光学反馈659。反射光学反馈657和荧光光学反馈659两者中的一些入射到位于检查装置151的头部115中的光学传感器171上。光学传感器171从反射光学反馈657和荧光光学反馈659两者生成光学传感器数据,并且所述光学传感器数据包含反射光原始数据663和荧
光原始数据671两者,但两者并非同时。在例如光学传感器283位于主体253中的电动牙刷251的实施例中,反射光学反馈657和荧光光学反馈659入射到光导289的端部,所述光导将收集的光输送到光学传感器283。
197.图25示出用于操作宽带led 701和窄带led 703两者以使得反射光学反馈657和荧光光学反馈659可在刷洗程序期间几乎同时生成的过程711。作为此过程711的一部分,生成第一控制信号713以控制宽带led 701的接通/关断状态,并且生成第二控制信号715以控制窄带led 703的接通/关断状态。第一控制信号713和第二控制信号715可由检查装置151的可编程处理器165生成,并且控制信号713、715被构造成使得当宽带led 701处于接通状态时,窄带led 703处于关断状态,并且当宽带led 701处于关断状态时,窄带led 703处于接通状态。通过以这种方式控制宽带led 701和窄带led 703,光学传感器171交替地接收717反射光学反馈657和荧光光学反馈659,而非同时接收两个光学反馈657、659。
198.返回图23,在过程651期间,使用反射光校准数据661校正反射光原始数据663的色彩,并且使用荧光校准数据669校正荧光原始数据671的色彩。通过计算口腔中有机物质的反射率和吸收率665来处理经过色彩校正的反射光原始数据,并且通过计算荧光强度672来处理经过色彩校正的荧光原始数据。imu传感器数据653、图像传感器数据655、反射光原始数据663、反射率和吸收率计算665、荧光原始数据671和荧光强度计算672都用于评估口腔护理特征667。与本文所述的其它过程一样,使用上述深度机器学习过程执行作为此过程651的一部分执行的对口腔护理特性667的评估。
199.作为口腔护理特性667的评估,imu传感器数据653和图像传感器数据655主要用于确定从口腔的哪些区段生成其余数据。在此基础上,反射光学反馈657和荧光光学反馈659可用于评估口腔的每一个区段和整个口腔的口腔护理特性。此外,过程651可将口腔护理得分分配给针对任何刷洗程序评估的每个口腔护理特性。在某些实施例中,可将分配的口腔护理得分保存在存储器中,使得可在第一刷洗程序与第二刷洗程序之间进行比较。另外,分配的口腔护理得分随时间的变化可由用户跟踪,或甚至提供给用户的牙科护理专业人员。
200.在此示例性实施例中,可评估的口腔护理特性包含口腔健康特性、刷洗有效性特性和齿白度特性。过程651可针对口腔健康特性673、刷洗有效性特性677和齿白度特性675中的每一者分配得分。这些得分可以是口腔护理装置头部在用户口腔内的实时方位的方位得分、口腔的不同区段的个别区段得分、整个口腔的总得分或口腔内的多个区段的组合得分。应显而易见的是,可评估的口腔护理特性的类型是取决于装置。例如,不包含牙齿清洁元件的检查装置151无法用于评估需要存在牙齿清洁元件的特性,例如刷洗压力。
201.口腔健康特性可包含软组织健康特性和硬组织健康特性中的至少一者。所述软组织健康特性可包含软组织着色特性、出血特性、血液氧化特性和组织水合特性中的一者或多者。硬组织健康特性可包含龋齿特性和细菌存在特性中的一者或多者。刷洗有效性特性可包含刷洗压力特性、行程频率特性、细菌存在特性和龋齿特性中的一者或多者。齿白度特性可包含在刷洗程序的时间对齿白度的评估和/或对齿白度变化的评估。
202.图26是以图形方式示出使用线扩散函数区分软组织和硬组织的过程的图731。口腔内的硬组织和软组织均可用以405nm波长为中心的窄带光谱照射,以在软组织和硬组织中引发荧光。荧光光学反馈包含绿色通道和红色通道,并且图731对照像素数目示出每个通道的强度。通过使用线扩散函数,在此示例中,硬组织与软组织之间的强度差为强度100。能
够区分软组织和硬组织是有用的,因为这有助于更准确地标识口腔护理装置103的头部115在口腔的任一区段内的位置。
203.图27是示出由各种有机物生成的荧光波段的图735。在此图中特别相关的是,卟啉在635nm和700nm左右有荧光峰。还已知,口腔硬组织(即,牙釉质)在约520nm处发出荧光。卟啉和口腔硬组织的峰容易区分,这使得过程651能够区分这些不同的有机物,并基于用户口腔中卟啉的存在分配口腔健康得分。
204.图28是示出四种不同类型的有机物的反射率曲线的图739,所述有机物是水、氧合血红蛋白(o
2 hb)、脱氧血红蛋白(hhb)和黑色素。可使用水的反射曲线来测量组织水合,同时可使用氧合血红蛋白和/或脱氧血红蛋白的反射曲线来测量组织氧合。在某些实施例中,可使用其反射率和/或荧光光谱曲线来标识和评估其它有机物质。
205.图29是示出随时间推移的齿白度的评估的图743。为了在口腔护理程序期间测量牙齿颜色,控制光模块173以用宽带可见光谱中的光照射口腔中的牙齿,并且由光学传感器171接收反射光,所述光学传感器响应于此生成光学传感器数据。然后,从光学传感器数据中提取cie*lab色空间标准的值,即l*(亮度,或值)、a*(红绿数量)、b*(黄蓝数量)色坐标的值或l(亮度)、c(色度)、h(色调)的值。图743示出在超过两周的时间段内使用反射宽带可见光测量牙齿颜色。在某些实施例中,当使用例如在图743中看到的数据来分配齿白度特性的得分时,可将标准化为0-100的标度的峰值处的值用于设置齿白度得分。在某些其它实施例中,值小于峰值的穿过曲线的线可用于分配齿白度得分。
206.在将得分分配给各种口腔护理特性时,在示例性实施例中,过程651最初使用0-100的范围分配内部得分,接着当将得分呈现给用户时,将所述得分标准化为0-4的标度以呈现给口腔护理系统101的用户。在某些实施例中,当得分是多于一个口腔护理特性的组合(例如,刷洗有效性可以是行程压力特性和细菌存在特性的组合)时,每个特性在组合之前可最初被分配单独的得分以产生平均得分。在某些实施例中,当得分将是多于一个口腔护理特性的组合时,要包含在组合得分中的一个或多个得分可进行加权以对所得组合得分具有更强或更小的影响。
207.图30中示出用于告知用户建议何时更换口腔护理装置头部的过程751。与本文讨论的其它过程一样,使用如上文论述的深度机器学习来执行此过程751的此分析。当训练深度机器学习算法时,算法在数据训练程序期间生成清洁元件磨损数据。所述清洁元件磨损数据接着可用作过程的一部分以评估是否应更换当前牙齿清洁元件。
208.此过程751可与图5和8中描绘的口腔护理装置一起使用,所述口腔护理装置均包含牙齿清洁元件和定位成生成牙齿清洁元件的图像的图像传感器。在图5的电动牙刷251的上下文中,图31a
–
b示出口腔护理装置的头部257的两个图像。在图31a中,牙齿清洁元件771全部是笔直的并且在线性方向上远离头部257延伸。这些牙齿清洁元件771不包含磨损形迹(wear indicia)。相比之下,在图31b中,许多牙齿清洁元件773以卷曲或弯曲方式从头部257延伸。牙齿清洁元件773中的卷曲或弯曲是磨损形迹,其指示牙齿清洁元件773可能需要更换。通过采用机器学习和使用面向牙齿清洁元件的图像传感器,过程可评估所述牙齿清洁元件的磨损形迹以确定是否建议需要更换所述牙齿清洁元件。此外,口腔护理装置103的可编程处理器或可编程装置105可向用户提供应该提出此类建议的音频或视觉警示。当然,此类建议可能极为依赖于预定磨损寿命,例如制造商可能设定的磨损寿命。并且,尽管图
31b将牙齿清洁元件中的弯曲示为需要更换的基础,但在某些实施例中,可捕捉为图像且由机器学习分析的牙齿清洁元件的任何物理性质可充当作出更换口腔护理装置头部的建议的基础。
209.回到过程751,对触发事件753的检测开始了对牙齿清洁元件的质量的分析。触发事件可以是使得口腔护理装置的可编程处理器开始执行过程751的任何适当事物。因此,触发事件可以是用户按下口腔护理装置上的按钮,无论这是当用户准备开始刷洗程序时打开口腔护理装置,还是在用户完成刷洗程序之后关闭口腔护理装置。在后一种情况下,仅在执行过程751之后,口腔护理装置才会完全关闭。在其它实施例中,触发事件可以是用户将口腔护理装置耦合到电源,以便对包含作为口腔护理装置的一部分的可再充电电池进行再充电。在检测到事件触发件753之后,口腔护理装置的图像传感器捕捉牙齿清洁元件的图像755。分析捕捉的图像,并且将磨损得分757分配给牙齿清洁元件。过程751继续确定磨损得分是否低于预定阈值759。如果未超过阈值,则过程751在空闲状态等待,直到检测到下一触发事件753。然而,如果磨损得分低于阈值,则处理器生成磨损信号。磨损信号将由磨损指示器接收,所述磨损指示器被配置成向用户提供反馈,所述反馈是更换牙齿清洁元件的建议。在某些实施例中,可编程装置105的显示屏或扬声器可用作磨损指示器。在某些其它实施例中,所述口腔护理装置可包含充当磨损指示器的led或扬声器。
210.虽然已关于具体示例(包含执行本发明的当前优选模式)描述了本发明,但是所属领域的技术人员应了解,存在上文所述的系统和技术的众多变化和置换。应当理解,在不背离本发明的范围的情况下,可以利用其它实施例并且可以进行结构和功能修改。因此,本发明的精神和范围应当广义地解释为如所附权利要求书中陈述的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1