一种武术平衡训练台及其使用方法
1.本技术涉及训练装置技术领域,更具体地说,涉及一种武术平衡训练台及其使用方法。
背景技术:
2.武术不仅可以传承中华文化,还能强身健体,传统武术发展到今天,武术的传承者功不可没,而随着现代社会的发展,在进行传统武术训练时通常借助现代化工具辅助训练,例如在进行平衡训练时借助可以晃动的平台提高训练效果。
3.相关技术中,在对学员进行平衡训练时,一般借组弹性气囊或者由机械传动产生晃动的训练台进行训练,该训练方式均以产生晃动促使学员保持平衡,导致平衡训练方式较为单一,训练难度较低,产生的训练效果较差,为了提高平衡训练难度和训练效果,例如现有技术公开号为cn108888931b的文献提供一种武术平衡训练台,该装置通过使多条皮带的转动方向通过控制装置的控制进行无规律的变化,此时训练者在皮带上部进行训练时脚底的皮带均在移动,该设计可以使训练者不能长时间踩在皮带上不动,必须时刻移动,训练者进行脚部的挪移与腾空时,脚部从皮带上离开再次接触后,皮带转动的方向可能已经进行改变,使训练者难以找到皮带转动方向改变的规律,通过该设计可以使训练者脚底所踩的位置处于没有规律的移动之中,配合训练平台的晃动,可以极大的提高训练者平衡训练的难度,可以帮助训练者短时间内即可获得平衡能力及灵活性等各方面的快速进步。
4.上述中的现有技术方案虽然通过使训练者脚底所踩的位置处于没有规律的移动之中可以实现提高训练者平衡训练的难度,可以帮助训练者短时间内即可获得平衡能力的效果,但是该装置只能适应对难度需求大的学员使用,对于初学者而言,较大的难度容易使学员难以接受,影响了初学者入门平衡训练的进程,因此由于无法选择训练难度而降低了训练台的实用性。
5.鉴于此,我们提出一种武术平衡训练台及其使用方法。
技术实现要素:
6.1.要解决的技术问题
7.本技术的目的在于提供一种武术平衡训练台及其使用方法,解决了无法选择训练难度而降低了训练台的实用性的技术问题,实现了可根据学员训练进程选择不同训练难度的技术效果。
8.2.技术方案
9.本技术提供了一种武术平衡训练台,包含:
10.底座,所述底座顶部固定设置有护筒,所述护筒顶部固定设置有支撑板,所述支撑板顶部固定设置有用于平衡训练的气囊,所述气囊顶部设置有用于训练者站立的训练板;
11.用于支撑所述训练板的竖板,所述竖板滑动设置于滑孔的内侧,所述支撑板顶部开设有滑孔;
12.转板,所述转板固定设置于滑环的外侧,所述滑环滑动设置于滑轨的内侧,所述滑轨固定设置于护筒和支撑板之间,所述转板顶部固定设置有感应器;
13.用于驱动所述竖板升降的驱动组件,所述驱动组件通过传动组件驱动所述转板转动。
14.通过采用上述技术方案,初学者进行平衡训练时,启动护筒内部的驱动组件驱动竖板向上移动,通过竖板对训练板支撑,使训练板位于水平状态不会产生晃动,在进行单腿训练时,学员一只腿离开训练板,驱动组件会通过驱动传动组件带动转板转动,并且转动位置随机,学员离开训练板的一只腿需要伸向转板的顶部,当转板顶部的感应器感应到伸腿后产生的距离后驱动组件再继续运行,相对于传统的单腿站立训练而言,使训练者单腿站立时随机活动,提高了训练效果,当进行整体平衡训练时,再通过驱动组件将竖板收回,同时停止对转板的驱动,此时训练板在气囊的支持下进行平衡训练,进而可根据训练情况选择性使用,提高了训练平台的实用性。
15.作为本技术文件技术方案的一种可选方案,所述驱动组件通过变换组件驱动所述传动组件,所述驱动组件包括电机,所述电机固定设置于底座的内部,所述电机的输出端固定设置有丝杆,所述丝杆的外侧螺纹设置有支撑架,所述支撑架固定设置于竖板的底部,所述丝杆的顶部设置有平滑段,所述丝杆转动时驱动所述变换组件运行,所述支撑架底部固定设置有推块a,所述推块a驱动所述变换组件与所述传动组件形成传动。
16.通过采用上述技术方案,电机驱动输出端的丝杆转动,使丝杆驱动外侧螺纹设置的支撑架运动,支撑架在竖板的限位下只能进行升降,当支撑架移动到丝杆顶部的平滑段外侧时,竖板刚好将训练板抬离气囊的顶部进行支撑,以便于初学者进行平衡训练,并且丝杆继续转动时不会再驱动支撑架升降,在驱动组件和传动组件之间设置变换组件,使驱动组件驱动竖板未将训练板支撑起之前,转板不会发生转动,反之,当转板转动时,说明竖板将训练板完全支撑起,防止训练板不稳定之前初学者进行单腿平衡训练,提高了使用的安全性。
17.作为本技术文件技术方案的一种可选方案,所述变换组件包括固定块,所述固定块转动设置于丝杆的外侧,所述丝杆外侧位于固定块的顶部固定设置有蜗杆,所述固定块靠近所述传动组件的一侧通过销轴对称转动设置有夹板,所述销轴外侧固定设置有用于夹板复位的扭簧,所述扭簧的一端与夹板固定设置,所述夹板之间转动设置有蜗轮a,所述蜗轮a一侧同轴固定设置有齿轮a,所述齿轮a驱动所述传动组件运行,所述夹板一侧固定设置有与推块a相互配合的推块b,所述夹板在所述推块a的推动下远离所述蜗杆,且所述齿轮a始终在所述蜗杆驱动下转动。
18.通过采用上述技术方案,电机在驱动竖板升降时,丝杆带动外侧的蜗杆转动,使蜗杆带动蜗轮a转动,蜗轮a带动齿轮a转动,此时齿轮a远离传动组件,无法形成传动,当支撑架上升到一定高度时,支撑架底部的推块a推动夹板外侧的推块b,使推块b带动蜗轮a远离蜗杆而向传动组件靠近,当支撑架停止上升时,齿轮a在蜗杆的驱动下继续转动,同时齿轮a向传动组件靠近后形成传动,蜗杆通过齿轮a驱动传动组件运行。
19.作为本技术文件技术方案的一种可选方案,所述夹板和齿轮a的一侧均转动设置有滑板,所述滑板远离蜗轮a的一端之间转动设置有蜗轮b,所述蜗轮b一侧同轴固定设置有齿轮b,所述齿轮b与齿轮a啮合传动,当所述蜗轮a远离所述蜗杆时,所述蜗轮b啮合设置于
蜗杆的外侧,所述滑板底部滑动设置有支座,所述支座固定设置于电机的顶部,所述支座与固定块固定设置。
20.通过采用上述技术方案,当夹板带动蜗轮a远离蜗杆时,夹板通过滑板带动蜗轮b向蜗杆靠近,当蜗轮a停止移动时,蜗轮b啮合配合在蜗杆的外侧,使蜗轮b在蜗杆的驱动下继续转动,进而通过蜗轮b带动齿轮b转动,当齿轮b转动时带动齿轮a转动,使齿轮a在转动时驱动传动组件运行。
21.作为本技术文件技术方案的一种可选方案,所述传动组件包括齿轮架,所述齿轮架固定设置于护筒的内部,所述齿轮架的一侧转动设置有齿轮c,所述齿轮c在所述齿轮a的驱动下转动,所述齿轮c的一侧同轴固定设置有锥齿轮a,所述锥齿轮a顶部啮合设置有锥齿轮b,所述齿轮架底部与锥齿轮b同轴固定设置有齿轮d,所述齿轮d在转动时驱动转板转动。
22.通过采用上述技术方案,当齿轮a转动时会驱动齿轮c在齿轮架的一侧转动,齿轮c带动锥齿轮a转动,使锥齿轮a带动顶部啮合设置的锥齿轮b转动,通过锥齿轮b带动齿轮架底部的齿轮d转动,使齿轮d驱动滑环在滑轨的滑动,进而带动转板转动。
23.作为本技术文件技术方案的一种可选方案,所述齿轮d外侧啮合设置有齿环,所述齿环转动设置于护筒的顶部,所述齿环顶部固定设置有连接板,所述连接板固定设置于滑环的内侧,所述滑环在连接板的驱动下带动转板转动。
24.通过采用上述技术方案,当齿轮d转动时带动齿环在底座的顶部转动,使齿环通过顶部的连接板带动滑环滑动,在齿环的作用下保证了滑环的稳定性滑动。
25.作为本技术文件技术方案的一种可选方案,所述支撑板外侧设置有防护组件,所述防护组件包括支撑台和护栏,所述支撑台位于转板的外侧,所述支撑台外侧固定设置有护栏。
26.通过采用上述技术方案,在训练过程中通过护栏对训练者防护,当训练者失衡是可以及时抓住护栏以防摔倒,并且护栏采用橡胶材质,防止对训练者造成磕碰损伤。
27.作为本技术文件技术方案的一种可选方案,所述训练板顶部开设有左右标记,所述训练板外侧均布有弹簧,所述弹簧另一端均与支撑板转动设置。
28.通过采用上述技术方案,当进行单腿训练时,可根据左右标记区分放置双脚,当转板转动时会根据左右脚的位置停止,使转板位于抬起脚的一侧,以保证训练者可以将脚伸到转板的上方。
29.本技术提供了上述武术平衡训练台的使用方法,包括以下步骤:
30.s1、初学者训练时,启动护筒内部的驱动组件驱动竖板向上移动,通过竖板对训练板支撑,使训练板位于水平状态不会产生晃动;
31.s2、此时,训练者可在训练板的顶部进行单腿配合训练,在进行单腿训练时,需要一只腿离开训练板,驱动组件会通过变换组件驱动传动组件带动转板转动,并且转动位置随机,学员离开训练板的一只腿需要伸向转板的顶部,当转板顶部的感应器感应到伸腿后产生的距离后驱动组件再继续运行;
32.s3、当进行整体平衡训练时,再通过驱动组件将竖板收回,同时停止对转板的驱动;
33.s4、此时,通过训练板在气囊的支持下进行平衡训练,训练板外侧的弹簧可保持训练板在气囊顶部的稳定性。
34.3.有益效果
35.本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
36.(1)本技术由于采用了驱动组件驱动竖板对训练板支撑,可根据训练情对训练板支撑或者不支撑,以改变训练难度,所以有效解决了无法选择训练难度而降低了训练台的实用性的问题,进而实现了初学者进行平衡训练时,启动护筒内部的驱动组件驱动竖板向上移动,通过竖板对训练板支撑,使训练板位于水平状态不会产生晃动,以便于进行单腿训练,后期整体训练时可撤销竖板对训练板的支撑使其产生晃动,提高训练难度。
37.(2)本技术通过在支撑板的外侧滑动设置转板,转板在驱动组件的强度下随机启停,训练者需要根据转板的位置将离开训练板的一只腿需要伸向转板的顶部,当转板顶部的感应器感应到伸腿后产生的距离后驱动组件再继续运行,相对于传统的单腿站立训练而言,使训练者单腿站立时随机活动,提高了训练效果。
38.(3)本技术通过在护筒的内部设置驱动竖板升降的驱动组件,在驱动组件的驱动下使训练板在切换训练状态时更加方便,并且在驱动组件驱动下通过传动组件带动转板转动,以便于在单腿平衡训练时进行使用。
39.(4)本技术通过在驱动组件和传动组件之间设置变换组件,使驱动组件驱动竖板未将训练板支撑起之前,转板不会发生转动,反之,当转板转动时,说明竖板将训练板完全支撑起,防止训练板不稳定之前初学者进行单腿平衡训练,提高了使用的安全性。
附图说明
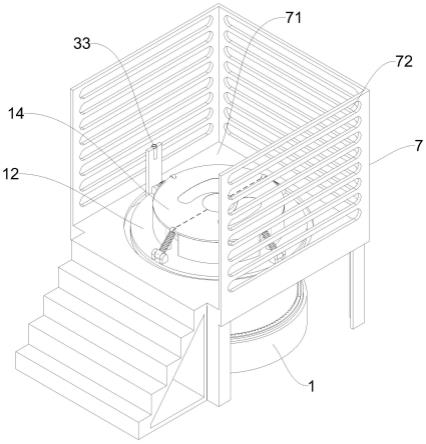
40.图1为本技术一较佳实施例公开的武术平衡训练台的整体结构示意图;
41.图2为本技术一较佳实施例公开的武术平衡训练台的爆炸结构示意图;
42.图3为本技术一较佳实施例公开的武术平衡训练台的内部一侧底部结构示意图;
43.图4为本技术一较佳实施例公开的武术平衡训练台的内部另一侧底部结构示意图;
44.图5为本技术一较佳实施例公开的武术平衡训练台中驱动组件、变换组件和传动组件的装配结构示意图;
45.图6为本技术一较佳实施例公开的武术平衡训练台中变换组件和传动组件的爆炸结构示意图;
46.图中标号说明:1、底座;11、护筒;12、支撑板;121、滑孔;13、气囊;14、训练板;141、左右标记;15、弹簧;2、竖板;3、滑轨;31、滑环;32、转板;33、感应器;4、驱动组件;41、电机;42、丝杆;43、支撑架;431、推块a;44、平滑段;5、变换组件;51、固定块;52、蜗杆;53、销轴;531、扭簧;54、夹板;541、推块b;55、蜗轮a;56、齿轮a;57、滑板;58、蜗轮b;59、齿轮b;510、支座;6、传动组件;61、齿轮架;62、齿轮c;63、锥齿轮a;64、锥齿轮b;65、齿轮d;66、齿环;67、连接板;7、防护组件;71、支撑台;72、护栏。
具体实施方式
47.以下结合说明书附图对本技术作进一步详细说明。
48.参照图1、图2和图3,本技术实施例公开一种武术平衡训练台,包括底座1,底座1顶部固定设置有护筒11,护筒11顶部固定设置有支撑板12,支撑板12顶部固定设置有用于平
衡训练的气囊13,气囊13的顶部设置有用于支撑学员的训练板14,支撑板12的内侧开设有滑孔121,滑孔121的内侧滑动设置有用于支撑训练板14的竖板2,护筒11的内部设置有用于驱动竖板2升降的驱动组件4,驱动组件4再驱动竖板2升降时通过变换组件5带动传动组件6运行,传动组件6在驱动组件4的驱动下带动滑环31在滑轨3的内侧滑动,滑轨3固定设置于护筒11和支撑板12之间,滑环31外侧固定设置有转板32,转板32顶部固定设置有用于感应距离的感应器33。
49.初学者进行平衡训练时,启动护筒11内部的驱动组件4驱动竖板2向上移动,通过竖板2对训练板14支撑,使训练板14位于水平状态不会产生晃动,在进行单腿训练时,学员一只腿离开训练板14,驱动组件4会通过变换组件5驱动传动组件6带动转板32转动,并且转动位置随机,学员离开训练板14的一只腿需要伸向转板32的顶部,当转板32顶部的感应器33感应到伸腿后产生的距离后驱动组件4再继续运行,相对于传统的单腿站立训练而言,使训练者单腿站立时随机活动,提高了训练效果,当进行整体平衡训练时,再通过驱动组件4将竖板2收回,同时停止对转板32的驱动,此时训练板14在气囊13的支持下进行平衡训练,进而可根据训练情况选择性使用,提高了训练平台的实用性。
50.参照图2、图4和图5,驱动组件4包括电机41,电机41固定设置于底座1的内侧,电机41的输出端固定设置有丝杆42,丝杆42的外侧螺纹设置有支撑架43,丝杆42的顶部设置有平滑段44,支撑架43固定设置于竖板2的底部,丝杆42在转动时带动变换组件5运行,支撑架43在升降时通过底部固定设置的推块a431驱动变换组件5与传动组件6形成传动。
51.电机41驱动输出端的丝杆42转动,使丝杆42驱动外侧螺纹设置的支撑架43运动,支撑架43在竖板2的限位下只能进行升降,当支撑架43移动到丝杆42顶部的平滑段44外侧时,竖板2刚好将训练板14抬离气囊13的顶部进行支撑,以便于初学者进行平衡训练,并且丝杆42继续转动时不会再驱动支撑架43升降。
52.参照图5和图6,变换组件5包括固定块51,固定块51转动设置于丝杆42的外侧,丝杆42外侧位于固定块51的顶部固定设置有蜗杆52,固定块51靠近传动组件6的一侧通过销轴53对称转动设置有夹板54,夹板54之间转动设置有蜗轮a55,蜗轮a55一侧同轴固定设置有齿轮a56,销轴53的外侧固定设置有扭簧531,扭簧531的一端与夹板54固定设置,夹板54外侧固定设置有与推块a431相互配合的推块b541,当推块b541在推块a431的带动下驱动蜗轮a55远离蜗杆52时,蜗轮a55仍在蜗杆52的驱动下转动,变换组件5通过齿轮a56驱动传动组件6运行。
53.电机41在驱动竖板2升降时,丝杆42带动外侧的蜗杆52转动,使蜗杆52带动蜗轮a55转动,蜗轮a55带动齿轮a56转动,此时齿轮a56远离传动组件6,无法形成传动,当支撑架43上升到一定高度时,支撑架43底部的推块a431推动夹板54外侧的推块b541,使推块b541带动蜗轮a55远离蜗杆52而向传动组件6靠近,当支撑架43停止上升时,齿轮a56在蜗杆52的驱动下继续转动,同时齿轮a56向传动组件6靠近后形成传动,蜗杆52通过齿轮a56驱动传动组件6运行。
54.参照图5和图6,夹板54和齿轮a56的外侧均转动设置有滑板57,滑板57之间位于蜗杆52与远离蜗轮a55的一侧转动设置有蜗轮b58,当蜗轮b58与蜗杆52啮合传动时蜗轮a55远离蜗杆52,蜗轮b58一侧同轴固定设置有齿轮b59,齿轮b59与齿轮a56啮合传动,滑板57滑动设置于支座510的顶部,支座510固定设置于电机41的顶部,固定块51与支座510固定设置。
55.当夹板54带动蜗轮a55远离蜗杆52时,夹板54通过滑板57带动蜗轮b58向蜗杆52靠近,当蜗轮a55停止移动时,蜗轮b58啮合配合在蜗杆52的外侧,使蜗轮b58在蜗杆52的驱动下继续转动,进而通过蜗轮b58带动齿轮b59转动,当齿轮b59转动时带动齿轮a56转动,使齿轮a56在转动时驱动传动组件6运行。
56.参照图4、图5和图6,传动组件6包括齿轮架61,齿轮架61固定设置于护筒11的内部,齿轮架61一侧转动设置有齿轮c62,齿轮c62在齿轮a56的驱动下转动,齿轮c62一侧同轴固定设置有锥齿轮a63,锥齿轮a63的顶部啮合设置有锥齿轮b64,齿轮架61底部与锥齿轮b64同轴固定设置有齿轮d65,齿轮d65在转动时驱动滑环31滑动。
57.当齿轮a56转动时会驱动齿轮c62在齿轮架61的一侧转动,齿轮c62带动锥齿轮a63转动,使锥齿轮a63带动顶部啮合设置的锥齿轮b64转动,通过锥齿轮b64带动齿轮架61底部的齿轮d65转动,使齿轮d65驱动滑环31在滑轨3的滑动,进而带动转板32转动。
58.参照图2和图4,齿轮d65外侧啮合设置有齿环66,齿环66转动设置于底座1的顶部,齿环66顶部位于护筒11的内部固定设置有连接板67,连接板67固定设置于滑环31的内侧。
59.当齿轮d65转动时带动齿环66在底座1的顶部转动,使齿环66通过顶部的连接板67带动滑环31滑动,在齿环66的作用下保证了滑环31的稳定性滑动。
60.参照图1,支撑板12外侧设置有用于安全防护的防护组件7,防护组件7包括支撑台71,支撑台71位于转板32的外侧,支撑台71的外侧固定设置有护栏72。
61.在训练过程中通过护栏72对训练者防护,当训练者失衡是可以及时抓住护栏72以防摔倒,并且护栏72采用橡胶材质,防止对训练者造成磕碰损伤。
62.参照图2,训练板14顶部设置有用于区分左右的左右标记141,训练板14的外侧均布有四个弹簧15,弹簧15的另一端均与支撑板12转动设置。
63.当进行单腿训练时,可根据分区放置双脚,当转板32转动时会根据左右脚的位置停止,使转板32位于抬起脚的一侧,以保证训练者可以将脚伸到转板32的上方。
64.参照图1-6,本技术实施例还公开上述武术平衡训练台的使用方法,包括以下步骤:
65.s1、初学者训练时,启动护筒11内部的驱动组件4驱动竖板2向上移动,通过竖板2对训练板14支撑,使训练板14位于水平状态不会产生晃动;
66.s2、此时,训练者可在训练板14的顶部进行单腿配合训练,在进行单腿训练时,需要一只腿离开训练板14,驱动组件4会通过变换组件5驱动传动组件6带动转板32转动,并且转动位置随机,学员离开训练板14的一只腿需要伸向转板32的顶部,当转板32顶部的感应器33感应到伸腿后产生的距离后驱动组件4再继续运行;
67.s3、当进行整体平衡训练时,再通过驱动组件4将竖板2收回,同时停止对转板32的驱动;
68.s4、此时,通过训练板14在气囊13的支持下进行平衡训练,训练板14外侧的弹簧15可保持训练板14在气囊13顶部的稳定性。
69.综合以上,本技术实施例公开的武术平衡训练台在使用时,初学者进行平衡训练时,启动护筒11内部的驱动组件4,驱动组件4中的电机41驱动输出端的丝杆42转动,使丝杆42驱动外侧螺纹设置的支撑架43运动,支撑架43在竖板2的限位下只能进行升降,当支撑架43移动到丝杆42顶部的平滑段44外侧时,竖板2刚好将训练板14抬离气囊13的顶部进行支
撑,同时支撑架43底部的推块a431推动夹板54外侧的推块b541,使推块b541带动蜗轮a55远离蜗杆52而向传动组件6靠近,此时夹板54通过滑板57带动蜗轮b58向蜗杆52靠近,当蜗轮a55停止移动时,蜗轮b58啮合配合在蜗杆52的外侧,使蜗轮b58在蜗杆52的驱动下继续转动,进而通过蜗轮b58带动齿轮b59转动,当齿轮b59转动时带动齿轮a56转动,同时与传动组件6中的齿轮c62形成传动,通过齿轮c62带动锥齿轮a63转动,使锥齿轮a63带动顶部啮合设置的锥齿轮b64转动,通过锥齿轮b64带动齿轮架61底部的齿轮d65转动,使齿轮d65驱动滑环31在滑轨3的滑动,进而带动转板32转动,当训练者位于训练板14顶部后一只腿离开训练板14,然后根据转板32随机停止的位置将脚伸到转板32的上方,当转板32顶部的感应器33感应到伸腿后产生的距离后驱动组件4再继续运行,相对于传统的单腿站立训练而言,使训练者单腿站立时随机活动,提高了训练效果;
70.当进行整体平衡训练时,再通过驱动组件4将竖板2收回,此时电机41反转,使电机41带动丝杆42反转,支撑架43在竖板2的压力下脱离平滑段44的外侧向丝杆42的外侧移动,当与丝杆42螺纹配合后在丝杆42的带动下向下移动,同时支撑架43底部的推块a431解除对推块b541的推动,夹板54在扭簧531的作用下带动蜗轮a55自动复位到蜗杆52的外侧,此时蜗轮b58与蜗杆52脱离,且齿轮a56与传动组件6相互脱离,使转板32不再转动,当训练板14失去竖板2的支撑后失去稳定性,训练者站在训练板14顶部会造成摇晃,因此可对平衡进行训练,并且为了增加训练难度可在训练板14顶部进行单腿训练,在训练过程中通过护栏72对训练者防护,当训练者失衡是可以及时抓住护栏72以防摔倒,并且护栏72采用橡胶材质,防止对训练者造成磕碰损伤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1