一种机械立体库位宽度推送方法与流程
1.本发明属于自主泊车技术领域,尤其涉及一种机械立体库位宽度推送方法。
背景技术:
2.自主泊车系统是一种用于解决车辆从停车场入口到停车位之间的车辆自动驾驶的问题。传统的自主泊车系统建立停车场高精地图,以车载运算单元以及车载的传感器实现环境感知、路径避障、车位搜寻,从而实现自动巡航泊车。自主泊车中的实时定位系统一般采用车载传感器,如环视相机、前视相机、毫米波雷达等,通过传感器提取的信息跟高精地图进行比对,实现对于车辆在高精地图中的定位。
3.机械立体库位是一种比较流行的提高停车场可泊车位的方案。然而,为了提高空间利用率,一般机械立体库位相对都比较窄,对司机在机械库位里的泊车造成了很大的困难和挑战。
4.目前市面上的自动泊车系统主要依赖车载摄像头或超声波探测,其测量误差普遍在10cm以上,严重影响泊车系统在立体库位场景下的泊车成功率,降低了用户体验。
技术实现要素:
5.本发明实施例提供一种机械立体库位宽度推送方法,旨在解决背景技术中提出的问题。
6.本发明实施例是这样实现的,一种机械立体库位宽度推送方法,该宽度推送方法包括如下步骤:
7.s1、建立至少包括停车位编号信息以及停车位宽度信息的停车场高精地图数据库;
8.s2、获取车辆gps信号,自动加载所选停车场的停车场高精地图;
9.s3、获取车辆can信号,提取车辆运动位姿;
10.s4、获取车辆周边图像信号,从图像信号内提取车辆周边停车位的停车位编号信息;
11.s5、将提取的停车位编号信息还原至车辆坐标系下,结合车辆位姿对提取的停车位编号信息进行补偿、跟踪;
12.s6、将补偿、跟踪处理后的停车位编号信息与停车场高精地图进行对比匹配;
13.s7、判断是否存在唯一匹配结果,若是则执行s8,否则执行s9;
14.s8、根据停车位编号信息获取对应的停车位宽度信息进行推送;
15.s9、测量车辆周边停车位的停车位宽度信息,并将停车位宽度信息与停车位编号信息对应生成停车位数据;
16.s10、将生成的停车位数据与停车场高精地图融合生成新的停车场高精地图。
17.优选的,所述车辆运动位姿通过从所述can信号获取车辆的轮速脉冲、方向盘和档位信号,并将车辆的轮速脉冲、方向盘和档位信号与车辆动力学模型结合获取。
18.优选的,所述车辆周边停车位的停车位编号信息通过深度学习的语义分割目标检测算法从车辆周边图像信号提取。
19.优选的,所述提取的停车位编号信息通过标定的相机模型还原至车辆坐标系下。
20.优选的,所述车辆周边停车位的停车位宽度信息通过高精度的视觉感知算法对车辆周边图像信号检测获取或人工交互测量获取。
21.优选的,所述停车位宽度信息的测量精度为5cm。
22.该机械立体库位宽度推送方法在车辆泊车时,通过匹配停车位编号,获取对应停车位的停车位宽度信息,可快速推送库位的宽度信息,从而便于判断车辆是否能够泊入库位;同时在未匹配到对应编号信息时,测量目标车位的车位宽度信息,并将停车位宽度信息与停车位编号信息融合生成停车位信息存入停车场高精地图数据库内备用,方便二次泊车或其他车辆泊车。
附图说明
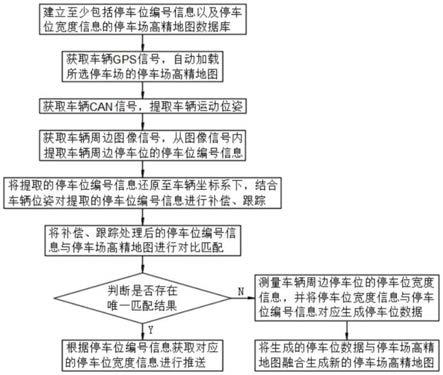
23.图1是一种机械立体库位宽度推送方法的宽度推送流程图。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
25.本发明提供一种机械立体库位宽度推送方法,如图1所示,该宽度推送方法包括如下步骤:
26.s1、建立至少包括停车位编号信息以及停车位宽度信息的停车场高精地图数据库;
27.s2、获取车辆gps信号,自动加载所选停车场的停车场高精地图;
28.s3、获取车辆can信号,从所述can信号获取车辆的轮速脉冲、方向盘和档位信号,并将车辆的轮速脉冲、方向盘和档位信号与车辆动力学模型结合,提取车辆运动位姿;
29.s4、获取车辆周边图像信号,通过深度学习的语义分割目标检测算法从车辆周边图像信号提取车辆周边停车位的停车位编号信息;
30.s5、通过标定的相机模型将提取的停车位编号信息还原至车辆坐标系下,结合车辆位姿对提取的停车位编号信息进行补偿、跟踪;
31.s6、将补偿、跟踪处理后的停车位编号信息与停车场高精地图进行对比匹配;
32.s7、判断是否存在唯一匹配结果,若是则执行s8,否则执行s9;
33.s8、根据停车位编号信息获取对应的停车位宽度信息进行推送;
34.s9、通过高精度的视觉感知算法对车辆周边图像信号检测或人工交互测量车辆周边停车位的停车位宽度信息,并将停车位宽度信息与停车位编号信息对应生成停车位数据;其中,所述停车位宽度信息的测量精度为5cm;
35.s10、将生成的停车位数据与停车场高精地图融合生成新的停车场高精地图。
36.执行上述步骤,车辆自动加载所选停车场的停车场高精地图,通过获取车辆周边图像信息,从图像信息内提取目标车位的停车位编号信息,将获取的停车位编号信息与停
车场高精地图进行匹配,在匹配到一致的停车位编号信息后,推送对应停车位编号的停车位宽度信息,从而方便判断车辆是否可泊入目标车位,而在未匹配到对应的停车位编号信息时,通过高精度的视觉感知算法对车辆周边图像信号检测或人工交互测量停车位宽度信息,并将测量的停车位宽度信息与检测到的停车位编号信息对应,融合生成停车位信息,并将停车位信息存入数据库内融合新的停车场高精地图,从而方便二次泊车或其他车辆泊车使用。
37.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种机械立体库位宽度推送方法,其特征在于,所述宽度推送方法包括如下步骤:s1、建立至少包括停车位编号信息以及停车位宽度信息的停车场高精地图数据库;s2、获取车辆gps信号,自动加载所选停车场的停车场高精地图;s3、获取车辆can信号,提取车辆运动位姿;s4、获取车辆周边图像信号,从图像信号内提取车辆周边停车位的停车位编号信息;s5、将提取的停车位编号信息还原至车辆坐标系下,结合车辆位姿对提取的停车位编号信息进行补偿、跟踪;s6、将补偿、跟踪处理后的停车位编号信息与停车场高精地图进行对比匹配;s7、判断是否存在唯一匹配结果,若是则执行s8,否则执行s9;s8、根据停车位编号信息获取对应的停车位宽度信息进行推送;s9、测量车辆周边停车位的停车位宽度信息,并将停车位宽度信息与停车位编号信息对应生成停车位数据;s10、将生成的停车位数据与停车场高精地图融合生成新的停车场高精地图。2.如权利要求1所述的机械立体库位宽度推送方法,其特征在于,所述车辆运动位姿通过从所述can信号获取车辆的轮速脉冲、方向盘和档位信号,并将车辆的轮速脉冲、方向盘和档位信号与车辆动力学模型结合获取。3.如权利要求1所述的机械立体库位宽度推送方法,其特征在于,所述车辆周边停车位的停车位编号信息通过深度学习的语义分割目标检测算法从车辆周边图像信号提取。4.如权利要求1所述的机械立体库位宽度推送方法,其特征在于,所述提取的停车位编号信息通过标定的相机模型还原至车辆坐标系下。5.如权利要求1所述的机械立体库位宽度推送方法,其特征在于,所述车辆周边停车位的停车位宽度信息通过高精度的视觉感知算法对车辆周边图像信号检测获取或人工交互测量获取。6.如权利要求5所述的机械立体库位宽度推送方法,其特征在于,所述停车位宽度信息的测量精度为5cm。
技术总结
本发明提供了一种机械立体库位宽度推送方法,属于自主泊车领域,该机械立体库位宽度推送方法在车辆行驶至停车场后,自动加载所选停车场的停车场高精地图,通过获取车辆周边图像信息,从图像信息内提取目标车位的停车位编号信息,将获取的停车位编号信息与停车场高精地图进行匹配,在匹配到一致的停车位编号信息后,推送对应的停车位宽度信息,方便判断车辆是否可泊入库位;在未匹配到停车位编号信息时,通过高精度的视觉感知算法对车辆周边图像信号检测或人工交互测量停车位宽度信息,将测量的停车位宽度信息与停车位编号信息对应,生成停车位信息,将停车位信息存入数据库内生成新的停车场高精地图,方便二次泊车或其他车辆泊车使用。泊车使用。泊车使用。
技术研发人员:蒋如意 马光林 于萌萌 田钧
受保护的技术使用者:上海追势科技有限公司
技术研发日:2021.06.01
技术公布日:2021/10/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1