一种混凝土臂架类泵车防倾翻控制系统及其方法与流程
本发明涉及一种混凝土臂架类泵车防倾翻控制系统及其方法,属于工程机械。
背景技术:
1、工程机械是社会发展的重要工具,在工程机械中带有臂架的车应用很广泛,因其有着作业范围广、作业方式灵活等特点。其中以混凝土臂架类泵车为代表的臂架类工程车辆,其目前存在的问题就是当处于空间狭小,其支腿不能全部展开,会存在倾翻的隐患,目前如何保证安全施工这一问题并没有得到很好的解决。
技术实现思路
1、本发明要解决的技术问题是,克服现有技术的缺陷,提供一种混凝土臂架类泵车防倾翻控制系统及其方法,能够在混凝土臂架类泵车支腿不能全部展开的情况下,防止其倾翻,保证安全施工。
2、为解决上述技术问题,本发明采用的技术方案为:
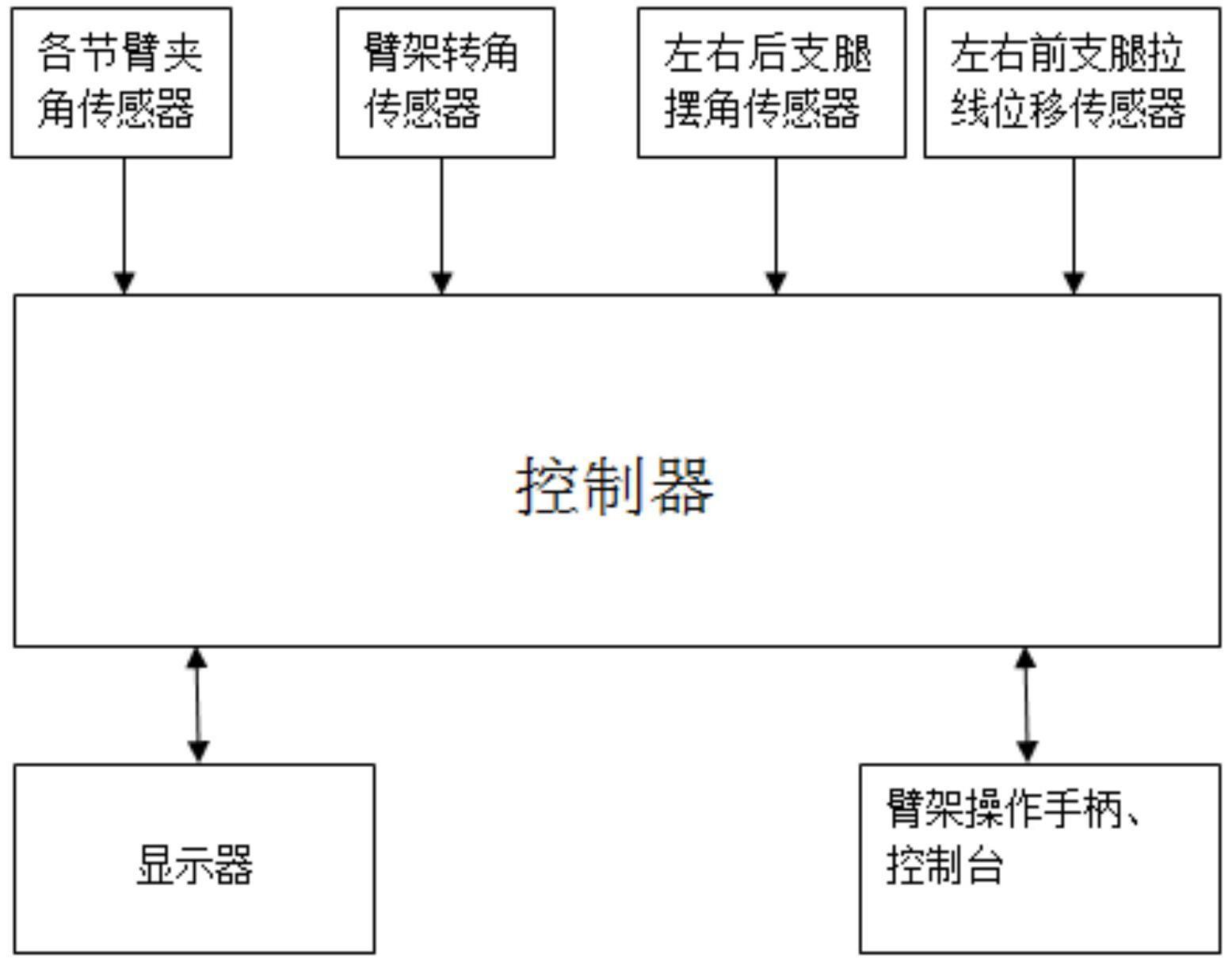
3、一种混凝土臂架类泵车防倾翻控制系统,包括系统检测传感器,所述系统检测传感器与控制器的信号输入端连接,所述控制器的信号输出端与臂架操作手柄及控制台连接,所述控制器接收所述系统检测传感器的采集信号进行处理后输出控制信号给臂架操作手柄及控制台来限制臂架的动作;所述系统检测传感器包括臂架转角传感器、臂架夹角传感器、左右后支腿摆角传感器和左右前支腿拉线位移传感器,所述臂架转角传感器安装在旋转平台上,用于检测整个臂架的旋转角度信号,所述臂架夹角传感器安装在一节臂和旋转转台连接处以及相邻节臂之间的连接处,用于检测各节臂与水平面的夹角信号,所述左右后支腿摆角传感器,安装在左右后支腿和车身连接处,用于检测左右后支腿的摆出角度信号,所述左右前腿拉线传感器安装在左右前腿和车身连接处,用于检测左右前腿的伸出长度信号。
4、包括显示器,所述显示器与所述控制器的信号输出端连接,用于显示所述系统检测传感器的采集信号以及所述控制器输出的控制信号。
5、一种混凝土臂架类泵车防倾翻控制方法,包括以下步骤:
6、接收各个节臂之间的夹角信号、整个臂架的旋转角度信号、左右后摆腿的摆出角度信号和左右前支腿的伸缩长度信号;
7、根据各个节臂之间的夹角、整个臂架的旋转角度、各个节臂长度以及已知的未进行旋转前各个节臂的位置坐标计算得到各个节臂相对于回转中心的重心位置,将各个节臂重心位置进行力矩合成得到总体臂架重心位置;
8、根据左右后摆腿的摆出角度计算出两个后支腿重心位置,根据左右前支腿的伸缩长度计算出两个前支腿的重心位置,根据总体臂架重心位置、两个后支腿重心位置、两个前支腿的重心位置以及已知的车底盘的重心位置进行力矩合成,得到整车的重心位置;
9、根据左右后支腿摆动角度、已知的左右后支腿长度和左右后支腿与车身的绞点连接坐标计算得到左右后支腿的顶点坐标位置,以及根据左右前支腿的伸缩长度和已知的左右前支腿与车身铰接位置计算得到左右前支腿的顶点坐标位置,左右后支腿的顶点坐标位置和左右前支腿的顶点坐标位置中四个顶点位置形成四边形框,即整车作业的安全范围;
10、将整车的重心位置与整车作业的安全范围进行对比,计算得到安全系数,根据安全系数范围输出限制臂架的动作信号。
11、各个节臂重心位置的计算方式如下,各节臂重心相对于回转中心的重心坐标p'为:
12、
13、其中,r为旋转矩阵,p为未进行旋转前的节臂的重心坐标;
14、
15、其中,c*表示cos(*),s*表示sin(*),α表示各节臂的倾角相对于水平面,γ表示整个臂架的旋转角度,以车尾方向为0度,逆时针为正,顺时针为负,β为车身与水平方向旋转角,t为平移量,t=[x0,y0,0];当计算一节臂时x0和y0为0,其余节臂时x0=l*cosα,y0=l*sinα,其中l为节臂长度。
16、整车的重心位置g总的计算方式如下:
17、
18、其中:gx、gy为各臂架重心位置横纵坐标,m臂为臂架总重量,g车x、g车y为车底盘重心位置横纵坐标,m车为车底盘总重量,m总为整车总重量,m总=m臂+m车。
19、安全系数s的计算方式如下:计算整车重心与回转中心之间的距离d1,连接回转中心和整车重心并向整车重心方向做延长线,得到延长线与四边形框的交点,计算回转中心与交点之间的距离d2,则安全系数s=(1-d1/d2)*100%。
20、当安全系数大于20%时,不输出任何信号,臂架自由运动;当安全系数在5%和20%之间时,输出对臂架进行减速控制信号,直到安全系数大于20%;当安全系数小于5%时,输出对臂架进行限臂处理控制信号,禁止臂架向安全系数减小方向运动。
21、本发明的有益效果:本发明提供的一种混凝土臂架类泵车防倾翻控制系统及其方法,通过检测传感器对整车状态信息进行采集,然后通过与车辆本身的参数进行结合得到整车的重心位置与整车作业的安全范围,并将两者进行对比,针对不同的对比值实现对臂架的不同控制,能够防止臂架类混凝土泵车的倾翻,增加了施工的安全性。
技术特征:
1.一种混凝土臂架类泵车防倾翻控制系统,其特征在于:包括系统检测传感器,所述系统检测传感器与控制器的信号输入端连接,所述控制器的信号输入端与臂架操作手柄及控制台连接,所述控制器接收所述系统检测传感器的采集信号进行处理后输出控制信号给臂架操作手柄及控制台来限制臂架的动作;所述系统检测传感器包括臂架转角传感器、臂架夹角传感器、左右后支腿摆角传感器和左右前支腿拉线位移传感器,所述臂架转角传感器安装在旋转平台上,用于检测整个臂架的旋转角度信号,所述臂架夹角传感器安装在一节臂和旋转转台连接处以及相邻节臂之间的连接处,用于检测各节臂与水平面的夹角信号,所述左右后支腿摆角传感器,安装在左右后支腿和车身连接处,用于检测左右后支腿的摆出角度信号,所述左右前腿拉线传感器安装在左右前腿和车身连接处,用于检测左右前腿的伸出长度信号。
2.根据权利要求1所述的一种混凝土臂架类泵车防倾翻控制系统,其特征在于:包括显示器,所述显示器与所述控制器的信号输出端连接,用于显示所述系统检测传感器的采集信号以及所述控制器输出的控制信号。
3.一种混凝土臂架类泵车防倾翻控制方法,其特征在于:包括以下步骤:
4.根据权利要求3所述的一种混凝土臂架类泵车防倾翻控制方法,其特征在于:各个节臂重心位置的计算方式如下,各节臂重心相对于回转中心的重心坐标p'为:
5.根据权利要求3所述的一种混凝土臂架类泵车防倾翻控制方法,其特征在于:整车的重心位置g总的计算方式如下:
6.根据权利要求3所述的一种混凝土臂架类泵车防倾翻控制方法,其特征在于:安全系数s的计算方式如下:计算整车重心与回转中心之间的距离d1,连接回转中心和整车重心并向整车重心方向做延长线,得到延长线与四边形框的交点,计算回转中心与交点之间的距离d2,则安全系数s=(1-d1/d2)*100%。
7.根据权利要求6所述的一种混凝土臂架类泵车防倾翻控制方法,其特征在于:当安全系数大于20%时,不输出任何信号,臂架自由运动;当安全系数在5%和20%之间时,输出对臂架进行减速控制信号,直到安全系数大于20%;当安全系数小于5%时,输出对臂架进行限臂处理控制信号,禁止臂架向安全系数减小方向运动。
技术总结
本发明公开了一种混凝土臂架类泵车防倾翻控制系统,包括系统检测传感器,系统检测传感器与控制器的信号输入端连接,控制器的信号输出端与臂架操作手柄及控制台连接,系统检测传感器包括臂架转角传感器,用于检测整个臂架的旋转角度信号,臂架夹角传感器用于检测各节臂与水平面的夹角信号,左右后支腿摆角传感器用于检测左右后支腿的摆出角度信号,左右前腿拉线传感器用于检测左右前腿的伸出长度信号。本发明还公开一种混凝土臂架类泵车防倾翻控制方法。本发明提供的一种混凝土臂架类泵车防倾翻控制系统及其方法,能够在混凝土臂架类泵车支腿不能全部展开的情况下,防止其倾翻,保证安全施工。
技术研发人员:黄福顺,何光义,王辉,曹启升,朱琼,徐林
受保护的技术使用者:徐州威卡电子控制技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!