取料方法、取料装置、划片机、可读存储介质以及电子设备与流程
本发明涉及划片机,特别是涉及一种取料方法、取料装置、划片机、可读存储介质以及电子设备。
背景技术:
1、划片机是使用刀片或者激光等方式高精度切割工件的装置。以工件为晶圆为例,在对晶圆进行加工时,需要对晶圆进行取料操作,将其从上料台转移至目标位置,方便后续搬运至承载台。
2、相关技术中,划片机上设有取料机构,取料机构一般采用夹持的方式将晶圆从上料台转移至承载台,实际应用中发现,晶圆转移后的位置精度无法保证,即最终将晶圆放置在承载台上的位置不够准确,存在位置偏差,该位置偏差会导致后续对晶圆的加工精度无法保证,影响加工质量。
技术实现思路
1、本发明的目的是提供一种取料方法、取料装置及划片机,通过对取料过程的优化,能够确保将工件转移至待加工位置的位置准确度,为保障后续工件的加工精度提供了基础。
2、本发明的另一目的是提供一种可读存储介质及电子设备,能够执行或实现前述取料方法。
3、为解决上述技术问题,本发明实施例提供一种取料方法,用于划片机,所述划片机包括取料机构、导轨和承载台,所述承载台位于所述导轨的下方,所述取料方法包括:
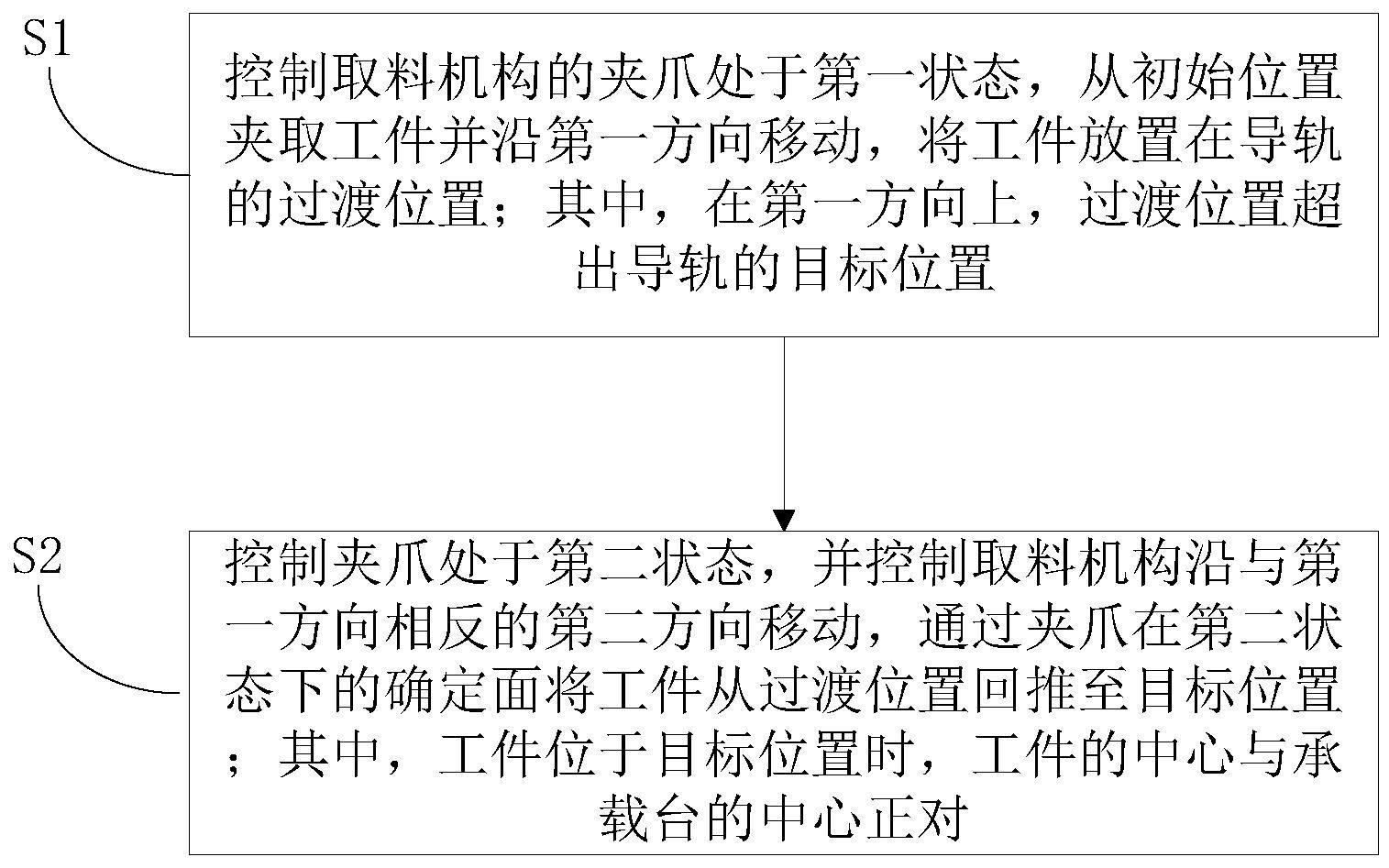
4、步骤s1、控制所述取料机构的夹爪处于第一状态,从初始位置夹取工件并沿第一方向移动,将所述工件放置在所述导轨的过渡位置;其中,在所述第一方向上,所述过渡位置超出所述导轨的目标位置;
5、步骤s2、控制所述夹爪处于第二状态,并控制所述取料机构沿与所述第一方向相反的第二方向移动,通过所述夹爪在所述第二状态下的确定面将所述工件从所述过渡位置回推至所述目标位置;其中,所述工件位于所述目标位置时,所述工件的中心与所述承载台的中心正对。
6、如上所述的取料方法,所述工件的周壁具有平面部;所述夹爪包括两个夹板和安装座,所述安装座连接两个所述夹板的第一端;
7、所述夹爪处于所述第一状态,两个所述夹板处于夹紧状态,所述夹爪处于所述第二状态,两个夹板处于张开状态,所述安装座朝向所述夹板第二端的表面为推动所述工件的确定面,所述夹爪回推所述工件时,所述确定面与所述平面部抵接。
8、如上所述的取料方法,所述确定面与所述目标位置之间具有标定关系;
9、所述步骤s2中,通过获取所述确定面与所述目标位置之间的距离来判断所述工件是否移动至所述目标位置。
10、如上所述的取料方法,所述取料机构上设有传感器,所述传感器用于检测所述夹爪的状态;
11、所述步骤s1中,若所述传感器检测到所述夹爪处于空夹状态,控制所述取料机构停止运动并发出报警信号。
12、如上所述的取料方法,所述步骤s2之后还包括:
13、步骤s3、控制所述取料机构移动至所述工件的上方,并控制所述取料机构的吸附组件吸附所述工件;控制所述导轨切换至避让位置;控制所述取料机构带动所述工件下移并放置在所述承载台上。
14、如上所述的取料方法,所述导轨包括第一导轨和第二导轨,所述第一导轨和所述第二导轨平行布置,且两者的长度方向与所述第一方向平行;所述导轨能够在承载位置和所述避让位置之间切换,在所述承载位置,所述第一导轨和所述第二导轨之间的距离小于所述工件的外径,在所述避让位置,所述第一导轨和所述第二导轨之间的距离大于所述工件的外径;
15、所述步骤s1中,所述导轨处于承载位置。
16、如上所述的取料方法,所述划片机包括上料台,所述上料台位于所述初始位置;所述步骤s1之前还包括:
17、步骤s0、控制所述上料台沿竖直方向升降,使所述上料台上放置的工件盒中的目标工件处于与所述导轨的支撑面相同的高度位置;其中,所述工件盒内设置有沿竖向间隔排布的多个工件。
18、本发明实施例还提供一种取料装置,用于划片机,所述划片机包括取料机构、导轨和承载台,所述承载台位于所述导轨的下方,所述取料装置包括:
19、第一控制模块,用于控制所述取料机构的夹爪处于第一状态,从初始位置夹取工件并沿第一方向移动,将所述工件放置在所述导轨的过渡位置;其中,在所述第一方向上,所述过渡位置超出所述导轨的目标位置;
20、第二控制模块,用于控制所述夹爪处于第二状态,并控制所述取料机构沿与所述第一方向相反的第二方向移动,通过所述夹爪在所述第二状态下的确定面将所述工件从所述过渡位置回推至所述目标位置;其中,所述工件位于所述目标位置时,所述工件的中心与所述承载台的中心正对。
21、本发明实施例还提供一种划片机,包括取料机构、导轨和承载台,所述承载台位于所述导轨的下方,其特征在于,所述划片机还包括上述所述的取料装置。
22、本发明实施例还提供一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上述任一项所述的取料方法的步骤。
23、本发明实施例还提供一种电子设备,包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如上述任一项所述的取料方法的步骤。
24、与已有取料方法相比,本发明提供的方案中,先控制取料机构将工件移动至超出目标位置的过渡位置,再利用取料机构的夹爪的确定面将工件回推至目标位置,其中,夹爪的确定面的位置可以获知,结合其与目标位置的相对位置关系和工件大小,可确保将工件回推至目标位置的准确性,从而保证工件在待加工位置的精确度,为保障后续工件的加工精度提供了基础。
25、本发明提供的取料装置、划片机、可读存储介质及电子设备与上述取料方法对应,具有相同的技术效果,不再赘述。
技术特征:
1.一种取料方法,用于划片机,所述划片机包括取料机构、导轨和承载台,所述承载台位于所述导轨的下方,其特征在于,所述取料方法包括:
2.根据权利要求1所述的取料方法,其特征在于,所述工件的周壁具有平面部;所述夹爪包括两个夹板和安装座,所述安装座连接两个所述夹板的第一端;
3.根据权利要求1所述的取料方法,其特征在于,所述确定面与所述目标位置之间具有标定关系;
4.根据权利要求1所述的取料方法,其特征在于,所述取料机构上设有传感器,所述传感器用于检测所述夹爪的状态;
5.根据权利要求1所述的取料方法,其特征在于,所述步骤s2之后还包括:
6.根据权利要求5所述的取料方法,其特征在于,所述导轨包括第一导轨和第二导轨,所述第一导轨和所述第二导轨平行布置,且两者的长度方向与所述第一方向平行;所述导轨能够在承载位置和所述避让位置之间切换,在所述承载位置,所述第一导轨和所述第二导轨之间的距离小于所述工件的外径,在所述避让位置,所述第一导轨和所述第二导轨之间的距离大于所述工件的外径;
7.根据权利要求1-6任一项所述的取料方法,其特征在于,所述划片机包括上料台,所述上料台位于所述初始位置;所述步骤s1之前还包括:
8.取料装置,用于划片机,所述划片机包括取料机构、导轨和承载台,所述承载台位于所述导轨的下方,其特征在于,所述取料装置包括:
9.一种划片机,包括取料机构、导轨和承载台,所述承载台位于所述导轨的下方,其特征在于,所述划片机还包括权利要求8所述的取料装置。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1-7任一项所述的取料方法的步骤。
11.一种电子设备,其特征在于,包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1-7任一项所述的取料方法的步骤。
技术总结
本发明公开了一种取料方法、取料装置、划片机、可读存储介质以及电子设备,该取料方法用于划片机,所述划片机包括取料机构、导轨和承载台,承载台位于导轨的下方,该取料方法包括:步骤S1、控制取料机构的夹爪处于第一状态,从初始位置夹取工件并沿第一方向移动,将工件放置在导轨的过渡位置;其中,在第一方向上,过渡位置超出导轨的目标位置;步骤S2、控制夹爪处于第二状态,并控制取料机构沿与第一方向相反的第二方向移动,通过夹爪在第二状态下的确定面将工件从过渡位置回推至目标位置;其中,工件位于目标位置时,工件的中心与承载台的中心正对。通过对取料过程的优化,能够确保将工件转移至待加工位置的位置准确度。
技术研发人员:冯小勇,代安朋
受保护的技术使用者:苏州镁伽科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!