无人机停放库
本技术涉及无人机库,特别是一种无人机停放库。
背景技术:
1、无人机以其高空灵活的视野和不受地形限制的机动性,已逐渐成为工业巡检与野外巡逻的重要工具。
2、但无人机在执行野外巡逻的过程中,存在以下不足之处:1、其飞行距离受到电池容量和耗电速度的限制,无法飞行到较远距离进行巡逻,并且,至少需要预留50%电量用于无人机返航;2、其执行野外巡逻的过程中,若遭遇极端天气(例如暴雨、暴雪、冰雹、狂风等),难以就近找到合适的避险场所,进而导致无人机损毁。
技术实现思路
1、本实用新型的目的是克服现有技术的不足,而提供一种无人机停放库,它解决了无人机野外巡航时的飞行距离受限,遭遇极端天气时难以就近避险的问题。
2、本实用新型的技术方案是:无人机停放库,包括壳体、上盖、托板和联动控制机构;
3、壳体内部设有用于容纳无人机的内腔,壳体上端设有连通至内腔的敞口;
4、两个上盖对称设置在壳体的敞口处,并均与联动控制机构关联,两个上盖在联动控制机构的驱动下做同步背向移动或同步相向移动,两个上盖同步背向移动以关闭敞口,两个上盖同步相向移动以打开敞口;
5、托板设置在壳体的内腔中,并与联动控制机构关联,托板在联动控制机构驱动下做竖直升降移动;
6、联动控制机构设在壳体的内腔中,并分别与托板和两个上盖关联,以实现托板与两个上盖的联动;其在驱动两个上盖同步背向移动的同时,托板竖直上升;其在驱动两个上盖同步相向移动的同时,托板竖直下降。
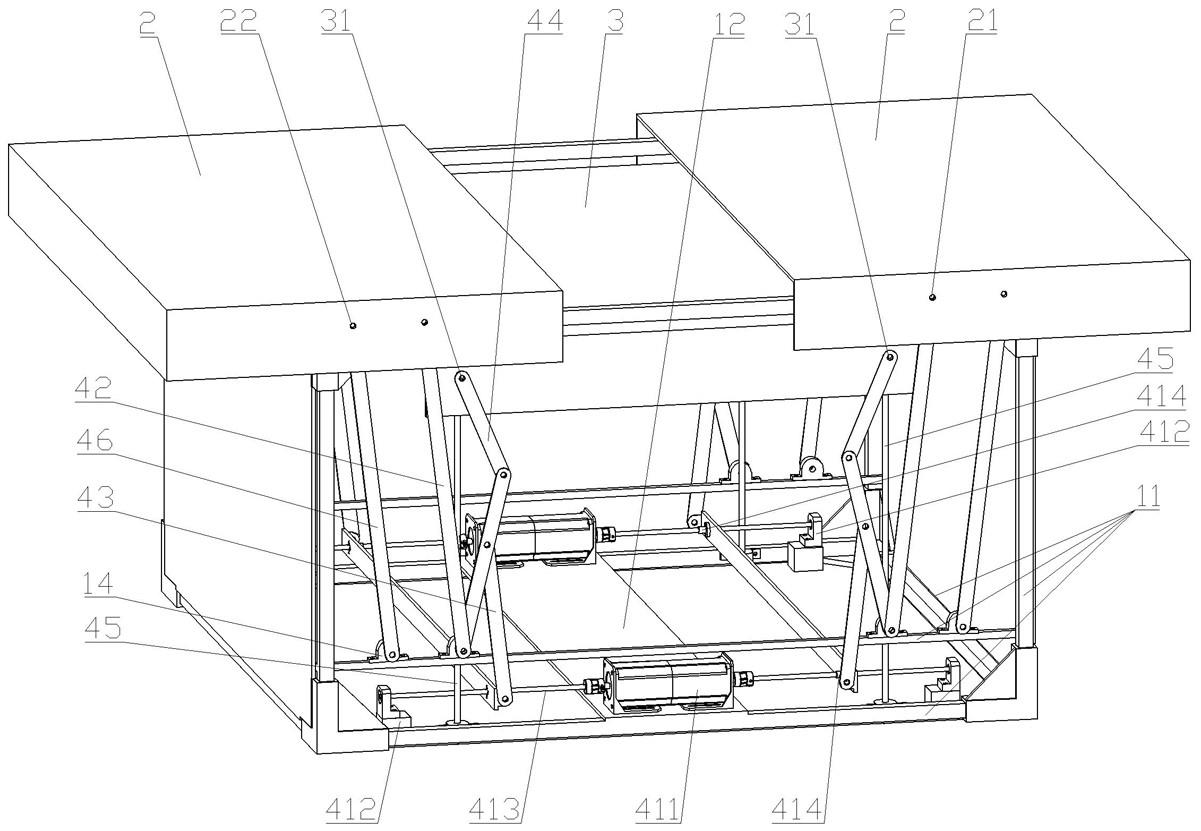
7、本实用新型进一步的技术方案是:壳体上设有第一铰接处;上盖上设有第二铰接处;托板上设有第三铰接处;
8、联动控制机构包括平移驱动组件、v形固定臂、连杆a、连杆b和导向杆;平移驱动组件包括动力输入件和动力输出件;动力输出件与动力输入件关联,并在动力输入件的驱动下做水平面上的往复直线移动;v形固定臂包括短杆和长杆,短杆和长杆在下端固接而形成固接点,短杆和长杆分别在上端设有铰接点a和铰接点b,短杆中部设有铰接点c,v形固定臂在固接点与壳体的第一铰接处铰接,v形固定臂在铰接点b与上盖的第二铰接处铰接;连杆a的下端与动力输出件铰接,连杆a的上端铰接在v形固定臂的铰接点c上;连杆b的下端与v形固定臂的铰接点a铰接,连杆b的上端与托板的第三铰接处铰接;导向杆下端固定连接在壳体的内腔底面上,导向杆上端穿过托板并与托板形成滑配。
9、本实用新型再进一步的技术方案是:壳体的内腔底面上设有两条相对布置的长边;
10、联动控制机构的数量有四组,其中两组紧邻且沿着一条长边对称布置在壳体内腔中,另外两组紧邻且沿着另一条长边对称布置在壳体内腔中;
11、相应的,所述第二铰接处共有四处,其中两处等高对称分布在一个上盖的两相对侧立面上,另外两处等高对称分布在另一个上盖的两相对侧立面上;
12、相应的,所述第一铰接处共有四处,两两一组等高对称分布在壳体的两相对侧立面上;
13、相应的,所述第三铰接处共有四处,两两一组等高对称分布在托板的两相对侧立面上。
14、本实用新型更进一步的技术方案是:平移驱动组件包括步进电机、丝杆、螺母和安装座;步进电机和安装座均固定安装在壳体的内腔底面上;丝杆呈水平布置,其一端通过联轴器与步进电机的机轴连接,另一端活动安装在安装座上;螺母螺纹连接在丝杆上;
15、在平移驱动组件中,所述动力输入件为步进电机,所述动力输出件为螺母。
16、本实用新型更进一步的技术方案是:壳体呈中空的长方体形,其包括钢制框架、侧壁板和底板;四块侧壁板分别固定连接在钢制框架的四个侧立面上,底板固定连接在钢制框架的底部上方;壳体的内腔由底板和四块侧壁板合围形成;相应的,托板呈矩形板。
17、本实用新型更进一步的技术方案是:壳体上共设有四处第四铰接处,四处第四铰接处两两一组等高对称分布在壳体的两相对侧立面上;
18、两个上盖上共设有四处第五铰接处,其中两处等高对称分布在一个上盖的两相对侧立面上,另外两处等高对称分布在另一个上盖的两相对侧立面上;
19、联动控制机构还包括联动杆,联动杆下端与壳体的第四铰接处铰接,上端与上盖的第五铰接处铰接,联动杆与v形固定臂同步同向摆动。
20、本实用新型更进一步的技术方案是:其还包括辅助功能机构;辅助功能机构包括压力传感器、摄像模块、灯带模块、gps定位模块和单片机;压力传感器嵌入式安装在托板内;两个摄像模块对称安装在壳体内腔的两个相对的侧壁面上,并高于托板布置;灯带模块安装在壳体内腔的侧壁面上,并高于托板布置;gps定位模块安装在壳体外部;单片机安装在壳体内腔中,并分别与压力传感器、摄像模块、灯带模块、gps定位模块及步进电机电连接。
21、本实用新型更进一步的技术方案是:辅助功能机构还包括智能终端,智能终端通过4g网络与单片机通信连接。
22、本实用新型与现有技术相比具有如下优点:
23、1、其安置于无人机的巡航/巡逻路线上,具有收容无人机的功能。无人机在巡逻/巡航过程中电量即将耗尽时,可就近选择停放库进行停放,无需预留50%的返航电量,相当于扩大了无人机的巡逻范围。无人机在巡逻/巡航过程中遭遇极端天气时,可就近选择停放库进行停放,以避免无人机损毁。
24、2、其通过联动控制结构实现了托板和上盖的联动,进而简化了电控设计难度及降低了用户控制难度。联动机制为:a、两个上盖同步背向移动的同时,托板竖直上升。此机制符合接收无人机时上盖与托板的运动方式;b、两个上盖同步相向移动的同时,托板竖直下降。此机制符合收容无人机时上盖与托板的配合运动要求。
25、3、当无人机停放在托板上时,一方面,通过分散在托板四角处下方的连杆b共同起到承重的作用,避免托板因局部/单点受力而产生较大形变,另一方面,通过分散在托板四角处的导向杆共同起到移动导向的作用,使托板升降移动的过程具有较好的平稳性。
26、4、基于两个上盖对称布置的结构,每个上盖的移动行程不会太大,打开或关闭敞口的速度相对较块,需要打开敞口时,控制两个上盖背向移动即可,需要关闭敞口时,控制两个上盖相向移动即可。
27、以下结合图和实施例对本实用新型作进一步描述。
技术特征:
1.无人机停放库,其特征是:包括壳体、上盖、托板和联动控制机构;
2.如权利要求1所述的无人机停放库,其特征是:壳体上设有第一铰接处;上盖上设有第二铰接处;托板上设有第三铰接处;
3.如权利要求2所述的无人机停放库,其特征是:壳体的内腔底面上设有两条相对布置的长边;
4.如权利要求3所述的无人机停放库,其特征是:平移驱动组件包括步进电机、丝杆、螺母和安装座;步进电机和安装座均固定安装在壳体的内腔底面上;丝杆呈水平布置,其一端通过联轴器与步进电机的机轴连接,另一端活动安装在安装座上;螺母螺纹连接在丝杆上;
5.如权利要求4所述的无人机停放库,其特征是:壳体呈中空的长方体形,其包括钢制框架、侧壁板和底板;四块侧壁板分别固定连接在钢制框架的四个侧立面上,底板固定连接在钢制框架的底部上方;壳体的内腔由底板和四块侧壁板合围形成;相应的,托板呈矩形板。
6.如权利要求5所述的无人机停放库,其特征是:壳体上共设有四处第四铰接处,四处第四铰接处两两一组等高对称分布在壳体的两相对侧立面上;
7.如权利要求3-6中任一项所述的无人机停放库,其特征是:其还包括辅助功能机构;辅助功能机构包括压力传感器、摄像模块、灯带模块、gps定位模块和单片机;压力传感器嵌入式安装在托板内;两个摄像模块对称安装在壳体内腔的两个相对的侧壁面上,并高于托板布置;灯带模块安装在壳体内腔的侧壁面上,并高于托板布置;gps定位模块安装在壳体外部;单片机安装在壳体内腔中,并分别与压力传感器、摄像模块、灯带模块、gps定位模块及步进电机电连接。
8.如权利要求7所述的无人机停放库,其特征是:辅助功能机构还包括智能终端,智能终端通过4g网络与单片机通信连接。
技术总结
无人机停放库,包括壳体、上盖、托板和联动控制机构;壳体内部设有用于容纳无人机的内腔,壳体上端设有连通至内腔的敞口;两个上盖对称设置在壳体的敞口处;托板设置在壳体的内腔中;联动控制机构设在壳体的内腔中,并分别与托板和两个上盖关联,以实现托板与两个上盖的联动;其在驱动两个上盖同步背向移动的同时,托板竖直上升;其在驱动两个上盖同步相向移动的同时,托板竖直下降。本技术安置于无人机巡航/巡逻的路线上,具有收容无人机的功能,并通过联动控制结构实现了托板和上盖的联动,进而简化了电控设计难度及降低了用户控制难度。
技术研发人员:赵德龙,彭熙磊,刘奇江,陈禹琦
受保护的技术使用者:南华大学
技术研发日:20220327
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!