一种游泳池机器人的制作方法
本技术涉及机器人,特别涉及一种游泳池机器人。
背景技术:
1、游泳池清洁通常分为两类,一种是通过水质过滤机器过滤游泳池的水质,另一种是通过机器人对游泳池的底部和侧壁的污垢进行清洁。
2、目前的游泳池机器人大多是在车身设置排水口,在机器人开机后即同步启动电机,然后将机器人放入游泳池内,通过电机驱动排水口排水产生的反作用力为机器人提供动力,然而,这种方式由于在机器人下沉到游泳池池底之前就已经开启电机,机器人里面会有气体导致其下沉至池底的时间较长,甚至不能沉底,清洁效率下降。
技术实现思路
1、本实用新型的主要目的在于提出一种游泳池机器人,旨在降低游泳池机器人下沉至池底的时间,提升清洁效率。
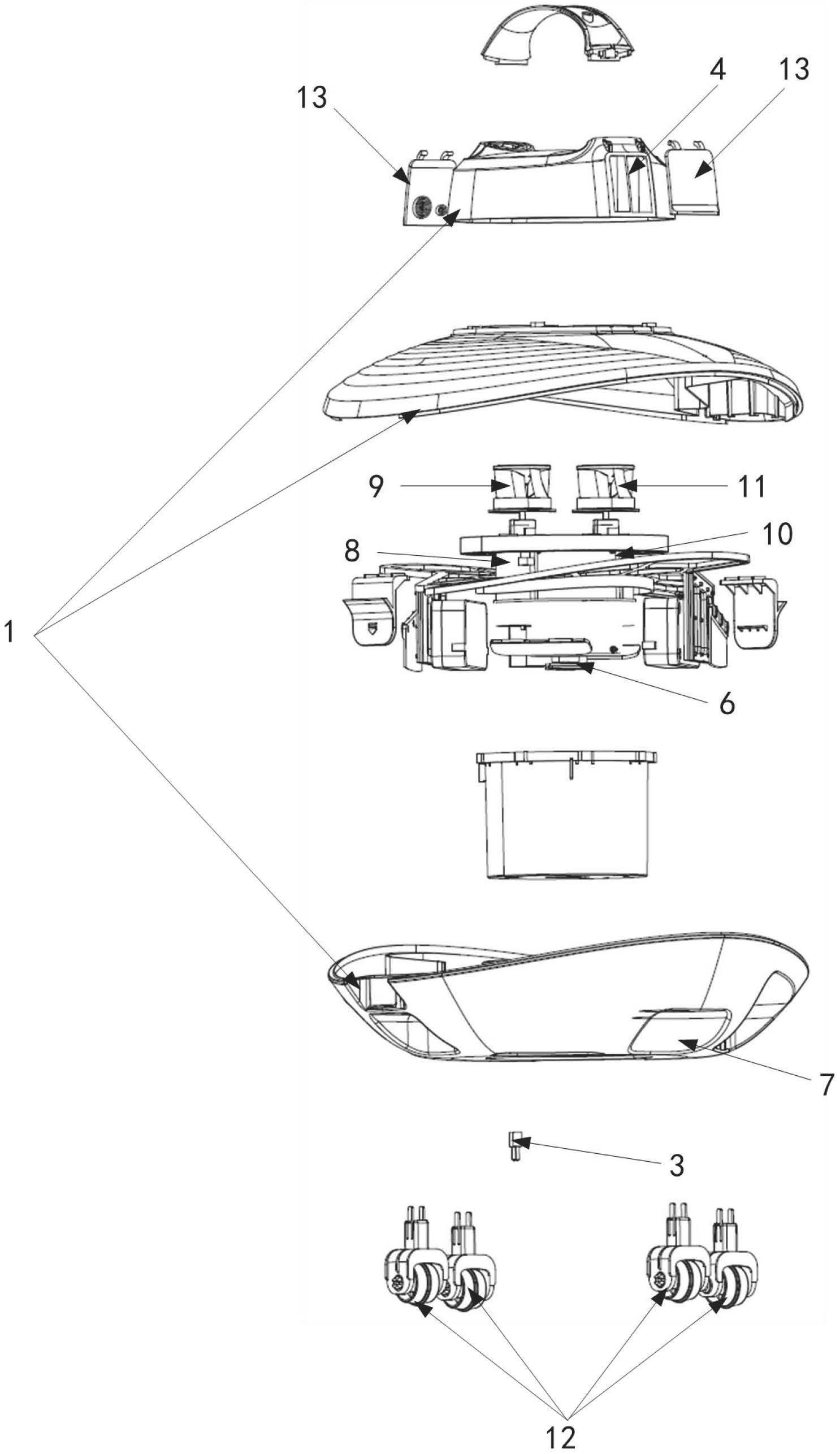
2、为实现上述目的,本实用新型提供了一种游泳池机器人,包括:车身,所述车身的底部设置有电源开关、入水检测模块,所述车身的顶部相对设置有第一排水口和第二排水口,所述车身内设置有电池、mcu、用于检测车身状态的车身状态检测模块、用于检测所述电池的电量的电量检测模块、用于驱动所述第一排水口排水的第一驱动机构、用于驱动所述第二排水口排水的第二驱动机构,所述电池、电源开关、入水检测模块、车身状态检测模块、电量检测模块、第一驱动机构、第二驱动机构分别与所述mcu连接。
3、本实用新型进一步的技术方案是,所述入水检测模块包括设置于所述车身底部的金属电极。
4、本实用新型进一步的技术方案是,所述车身状态检测模块包括设置于所述车身内的imu。
5、本实用新型进一步的技术方案是,所述车身的底部设置有进水口,所述进水口与所述第一排水口相连通形成第一水道,与所述第二排水口相连通形成第二水道,所述第一驱动机构包括设置于所述车身内的第一驱动电机、设置于所述第一水道内与所述第一驱动电机连接的第一螺旋桨,所述第二驱动机构包括设置于所述车身内的第二驱动电机、设置于所述第二水道内与所述第二驱动电机连接的第二螺旋桨,所述mcu分别与所述第一驱动电机、第二驱动电机连接。
6、本实用新型进一步的技术方案是,所述进水口、第一排水口和第二排水口均设置有单向阀门。
7、本实用新型进一步的技术方案是,所述车身的底部四角设置有四个车轮,所述四个车轮至少有两个不能转向,以保证所述游泳池机器人直线前进或后退。
8、本实用新型进一步的技术方案是,所述车身为弧形结构。
9、本实用新型游泳池机器人的有益效果是:本实用新型通过上述技术方案,包括:车身,车身的底部设置有电源开关、入水检测模块,车身的顶部相对设置有第一排水口和第二排水口,车身内设置有电池、mcu、用于检测车身状态的车身状态检测模块、用于检测电池的电量的电量检测模块、用于驱动第一排水口排水的第一驱动机构、用于驱动第二排水口排水的第二驱动机构,电池、电源开关、入水检测模块、车身状态检测模块、电量检测模块、第一驱动机构、第二驱动机构分别与mcu连接,在游泳池机器人开机后,只有当游泳池机器人位于水中后,在自身重力作用下沉入池底且处于静止状态时才开启第一驱动机构或第二驱动机构,以驱动第一排水口或第二排水口排水,使机器人在游泳池内前进实现吸污功能,降低了游泳池机器人的沉底时间,进而提升了清洁效率。
技术特征:
1.一种游泳池机器人,其特征在于,包括:车身,所述车身的底部设置有电源开关、入水检测模块,所述车身的顶部相对设置有第一排水口和第二排水口,所述车身内设置有电池、mcu、用于检测车身状态的车身状态检测模块、用于检测所述电池的电量的电量检测模块、用于驱动所述第一排水口排水的第一驱动机构、用于驱动所述第二排水口排水的第二驱动机构,所述电池、电源开关、入水检测模块、车身状态检测模块、电量检测模块、第一驱动机构、第二驱动机构分别与所述mcu连接。
2.根据权利要求1所述的游泳池机器人,其特征在于,所述入水检测模块包括设置于所述车身底部的金属电极。
3.根据权利要求1所述的游泳池机器人,其特征在于,所述车身状态检测模块包括设置于所述车身内的imu。
4.根据权利要求1所述的游泳池机器人,其特征在于,所述车身的底部设置有进水口,所述进水口与所述第一排水口相连通形成第一水道,与所述第二排水口相连通形成第二水道,所述第一驱动机构包括设置于所述车身内的第一驱动电机、设置于所述第一水道内与所述第一驱动电机连接的第一螺旋桨,所述第二驱动机构包括设置于所述车身内的第二驱动电机、设置于所述第二水道内与所述第二驱动电机连接的第二螺旋桨,所述mcu分别与所述第一驱动电机、第二驱动电机连接。
5.根据权利要求4所述的游泳池机器人,其特征在于,所述进水口、第一排水口和第二排水口均设置有单向阀门。
6.根据权利要求1所述的游泳池机器人,其特征在于,所述车身的底部四角设置有四个车轮,所述四个车轮至少有两个不能转向,以保证所述游泳池机器人直线前进或后退。
7.根据权利要求1至6任意一项所述的游泳池机器人,其特征在于,所述车身为弧形结构。
技术总结
本技术公开了一种游泳池机器人,该游泳池机器人包括:车身,车身的底部设置有电源开关、入水检测模块,车身的顶部相对设置有第一排水口和第二排水口,车身内设置有电池、MCU、车身状态检测模块、电量检测模块、第一驱动机构、第二驱动机构,电池、电源开关、入水检测模块、车身状态检测模块、电量检测模块、第一驱动机构、第二驱动机构分别与MCU连接。本技术在游泳池机器人开机后,只有当游泳池机器人位于水中,在自身重力作用下沉入池底且处于静止状态时才开启第一驱动机构或第二驱动机构,以驱动第一排水口或第二排水口排水,使机器人在游泳池内前进实现吸污功能,降低了游泳池机器人的沉底时间,进而提升了清洁效率。
技术研发人员:邓卓明
受保护的技术使用者:深圳市思傲拓科技有限公司
技术研发日:20220928
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!