一种预应力预制梁自动张拉台车的制作方法
本技术涉及预应力张拉领域,具体涉及一种预应力预制梁自动张拉台车。
背景技术:
1、目前预应力梁的张拉已经实现持荷,锚固,回顶,以及张拉数据记录全过程的自动化。但是张拉千斤顶移动到位和安装千斤顶还需要人工操作,事实上并未减少张拉操作人数以及降低人工成本。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种预应力预制梁自动张拉台车,使张拉千斤顶移动到位以及安装千斤顶实现自动操作,可以减少张拉操作人数以及降低人工成本。
2、本实用新型解决上述技术问题的技术方案如下:一种预应力预制梁自动张拉台车,包括预应力预制梁自动张拉多轴运动装置,所述预应力预制梁自动张拉多轴运动装置用于安装内置有工具锚的千斤顶并通过带动所述千斤顶进行多轴运动使所述工具锚的锚孔与预制梁上工作锚的锚孔对齐后合锚;具体的,所述预应力预制梁自动张拉多轴运动装置包括x轴运动机构、y轴运动机构、z轴运动机构、u轴俯仰机构、v轴摇摆机构、w轴旋转机构和z轴辅助运动机构;所述x轴运动机构用于带动所述千斤顶沿x轴左右来回移动;所述y轴运动机构用于带动所述千斤顶沿y轴上下来回移动;所述z轴运动机构用于带动所述千斤顶沿z轴前后来回移动;所述u轴俯仰机构用于带动所述千斤顶绕x轴上下俯仰移动;所述v轴摇摆机构用于带动所述千斤顶绕y轴左右摇摆运动;所述w轴旋转机构用于带动所述千斤顶或所述千斤顶内置的工具锚绕由所述u轴俯仰机构和所述v轴摇摆机构共同确定的方向轴旋转运动;所述z轴辅助运动机构用于带动所述千斤顶沿由所述u轴俯仰机构和所述v轴摇摆机构共同确定的方向轴前后来回移动。
3、本实用新型的有益效果是:在本实用新型一种预应力预制梁自动张拉台车中,将内置有工具锚的千斤顶安装在预应力预制梁自动张拉多轴运动装置上;通过x轴运动机构调节千斤顶在x轴上的位置,使千斤顶内的工具锚的锚孔与预应力预制梁上工作锚的锚孔在x轴上的位置对应;通过y轴运动机构调节千斤顶在y轴上的位置,使千斤顶内的工具锚的锚孔与预应力预制梁上工作锚的锚孔在y轴上的位置对应;通过z轴运动机构调节千斤顶在z轴上的位置,使千斤顶内的工具锚的锚孔与预应力预制梁上工作锚的锚孔在z轴上的位置大致对应;由于施工误差,预应力预制梁上工作锚的锚孔并非都是垂直预制梁端面的,或多或少会存在偏差,包括向上或向下偏,或/和,向左或向右偏,导致从工作锚锚孔外伸的钢绞线也存在方向偏差,并非都是垂直预制梁端面;因此,当工具锚锚孔的孔轴与工作锚锚孔的孔轴不重合时,从工作锚锚孔内外伸的钢绞线无法顺利的穿插进工具锚锚孔;所以,当千斤顶在x、y、z三轴上的位置确定之后,通过u轴俯仰机构调整千斤顶上下俯仰运动,使千斤顶内工具锚锚孔的锚轴的上下偏转角与工作锚锚孔的锚轴的上下偏转角相同;通过v轴摇摆机构调整千斤顶左右摇摆运动,使千斤顶内工具锚锚孔的锚轴的左右偏转角与工作锚锚孔的锚轴的左右偏转角相同;当千斤顶内工具锚锚孔的锚轴的上下偏转角以及左右偏转角与工作锚锚孔的锚轴的上下偏转角以及左右偏转角对应相等时,说明工具锚锚孔的孔轴与工作锚锚孔的孔轴重合;由于工具锚上存在多个锚孔,张拉时需要将工具锚上的锚孔与工作锚上的锚孔一一对应,因此通过w轴旋转机构驱动工具锚旋转使工具锚上的锚孔与工作锚上的锚孔一一对应;最后,当工具锚锚孔的孔轴与工作锚锚孔的孔轴重合且工具锚上的锚孔与工作锚上的锚孔一一对应后,通过z轴辅助运动机构将千斤顶推向预应力预制梁上的工作锚,即可顺利的将预制梁上从工作锚锚孔外伸的钢绞线穿插进千斤顶内工具锚锚孔以进行张拉试验。由上可知,本实用新型可以使张拉千斤顶移动到位以及安装千斤顶实现自动操作,因而可以减少张拉操作人数以及降低人工成本。
技术特征:
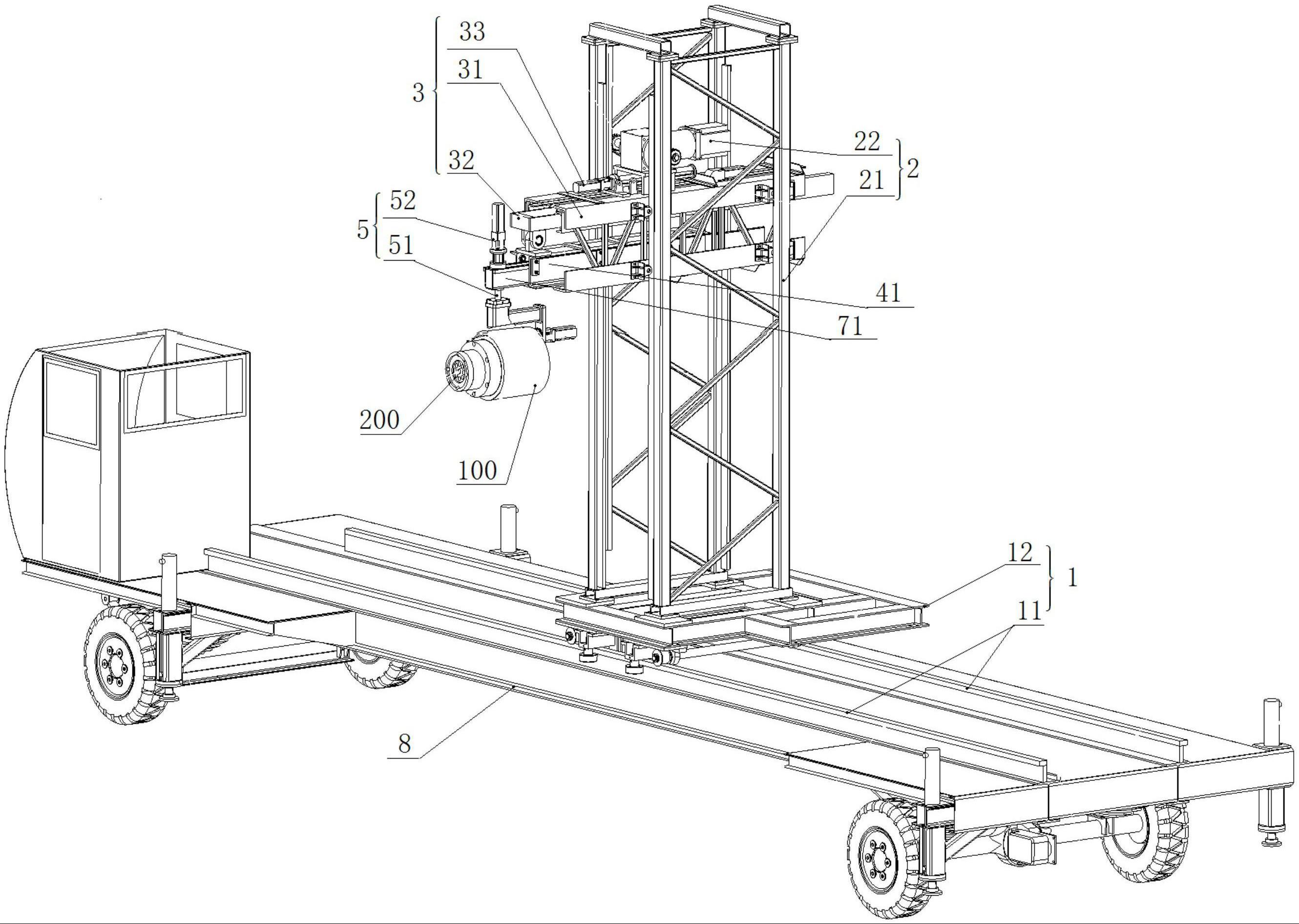
1.一种预应力预制梁自动张拉台车,其特征在于:包括预应力预制梁自动张拉多轴运动装置,所述预应力预制梁自动张拉多轴运动装置用于安装内置有工具锚(200)的千斤顶(100)并通过带动所述千斤顶(100)进行多轴运动使所述工具锚(200)的锚孔与预制梁上工作锚(300)的锚孔对齐后合锚;具体的,所述预应力预制梁自动张拉多轴运动装置包括x轴运动机构(1)、y轴运动机构(2)、z轴运动机构(3)、u轴俯仰机构(4)、v轴摇摆机构(5)、w轴旋转机构(6)和z轴辅助运动机构(7);所述x轴运动机构(1)用于带动所述千斤顶(100)沿x轴左右来回移动;所述y轴运动机构(2)用于带动所述千斤顶(100)沿y轴上下来回移动;所述z轴运动机构(3)用于带动所述千斤顶(100)沿z轴前后来回移动;所述u轴俯仰机构(4)用于带动所述千斤顶(100)绕x轴上下俯仰移动;所述v轴摇摆机构(5)用于带动所述千斤顶(100)绕y轴左右摇摆运动;所述w轴旋转机构(6)用于带动所述千斤顶(100)或所述千斤顶(100)内置的工具锚(200)绕由所述u轴俯仰机构(4)和所述v轴摇摆机构(5)共同确定的方向轴旋转运动;所述z轴辅助运动机构(7)用于带动所述千斤顶(100)沿由所述u轴俯仰机构(4)和所述v轴摇摆机构(5)共同确定的方向轴前后来回移动。
2.根据权利要求1所述的预应力预制梁自动张拉台车,其特征在于:所述u轴俯仰机构(4)包括转动梁(41)、u轴丝杆(42)和u轴数控伺服驱动电机(43);所述转动梁(41)以及所述u轴丝杆(42)在水平方向上的投影均与z轴平行;所述u轴丝杆(42)上设有螺母,所述u轴丝杆(42)的一端为自由端,所述u轴丝杆(42)的另一端为铰接端;所述转动梁(41)的一端为第一铰接端,所述转动梁(41)的另一端为第二铰接端并与所述u轴丝杆(42)上的螺母铰接;所述u轴数控伺服驱动电机(43)的输出轴与所述u轴丝杆(42)连接并用于驱动所述u轴丝杆(42)旋转,从而带动所述螺母在所述u轴丝杆(42)上来回移动,进而使所述转动梁(41)以所述转动梁(41)的第一铰接端为绕点绕x轴上下俯仰移动。
3.根据权利要求2所述的预应力预制梁自动张拉台车,其特征在于:所述z轴辅助运动机构(7)包括内吊梁(71)和液压油缸(72),所述内吊梁(71)和所述液压油缸(72)均设置在所述转动梁(41)内;所述液压油缸(72)的一端铰接安装于所述转动梁(41),所述液压油缸(72)的另一端与所述内吊梁(71)铰接,所述液压油缸(72)用于通过外伸和回缩推动所述内吊梁(71)沿所述转动梁(41)来回移动。
4.根据权利要求3所述的预应力预制梁自动张拉台车,其特征在于:所述x轴运动机构(1)沿x轴设置;所述y轴运动机构(2)沿y轴设置在所述x轴运动机构(1)的运动组件上;所述z轴运动机构(3)沿z轴设置在所述y轴运动机构(2)的运动组件上。
5.根据权利要求4所述的预应力预制梁自动张拉台车,其特征在于:所述转动梁(41)的第一铰接端以及所述u轴丝杆(42)的铰接端均铰接在所述z轴运动机构(3)的运动组件上;所述v轴摇摆机构(5)安装在所述z轴辅助运动机构(7)的内吊梁(71)上;所述w轴旋转机构(6)安装在所述v轴摇摆机构(5)的摇摆组件上。
6.根据权利要求4所述的预应力预制梁自动张拉台车,其特征在于:所述v轴摇摆机构(5)安装在所述z轴运动机构(3)的运动组件上;所述转动梁(41)的第一铰接端以及所述u轴丝杆(42)的铰接端均铰接在所述v轴摇摆机构(5)的摇摆组件上;所述w轴旋转机构(6)安装在所述z轴辅助运动机构(7)的内吊梁(71)上。
7.根据权利要求1至6任一项所述的预应力预制梁自动张拉台车,其特征在于:所述v轴摇摆机构(5)包括v轴旋转轴(51)和v轴旋转电机(52),所述v轴旋转轴(51)沿y轴设置,所述v轴旋转电机(52)与所述v轴旋转轴(51)连接并用于驱动所述v轴旋转轴(51)旋转,所述v轴旋转轴(51)旋转即实现绕y轴左右摇摆运动。
8.根据权利要求1至6任一项所述的预应力预制梁自动张拉台车,其特征在于:所述w轴旋转机构(6)包括主动齿轮(61)、从动齿轮(62)和w轴数控电机(63),所述从动齿轮(62)固定设置在所述千斤顶(100)的后端面或所述工具锚(200)的后端面上,所述主动齿轮(61)套装固定在所述w轴数控电机(63)的输出轴上并与所述从动齿轮(62)齿合,所述w轴数控电机(63)用于驱动所述主动齿轮(61)旋转从而带动所述从动齿轮(62)旋转,所述从动齿轮(62)旋转带动所述千斤顶(100)或所述工具锚(200)旋转。
9.根据权利要求1至6任一项所述的预应力预制梁自动张拉台车,其特征在于:所述x轴运动机构(1)包括x轴轨道(11)、x轴台车(12)和x轴数控伺服驱动装置,所述y轴运动机构(2)包括y轴固定架(21)和y轴数控伺服驱动装置(22),所述z轴运动机构(3)包括z轴固定架(31)、z轴小车(32)和z轴数控伺服驱动装置(33);所述x轴轨道(11)沿x轴固定设置,所述x轴台车(12)滑动卡装在所述x轴轨道(11)上,所述x轴数控伺服装置用于驱动所述x轴台车(12)沿所述x轴轨道(11)左右来回移动;所述y轴固定架(21)沿y轴固定安装在所述x轴台车(12)上,所述z轴固定架(31)沿z轴滑动卡装在所述y轴固定架(21)内,所述y轴数控伺服驱动装置(22)用于驱动所述z轴固定架(31)沿所述y轴固定架(21)上下来回移动;所述z轴小车(32)滑动卡装在所述z轴固定架(31)上,所述z轴数控伺服驱动装置(33)用于驱动所述z轴小车(32)沿所述z轴固定架(31)前后来回移动。
10.根据权利要求1至6任一项所述的预应力预制梁自动张拉台车,其特征在于:预应力预制梁自动张拉台车还包括数控平台(8),所述预应力预制梁自动张拉多轴运动装置安装在所述数控平台(8)上并随所述数控平台(8)移动。
技术总结
本技术涉及预应力张拉领域,具体涉及一种预应力预制梁自动张拉台车,包括X轴运动机构、Y轴运动机构、Z轴运动机构、U轴俯仰机构、V轴摇摆机构、W轴旋转机构和Z轴辅助运动机构;本技术通过X轴运动机构、Y轴运动机构、Z轴运动机构、U轴俯仰机构、V轴摇摆机构、W轴旋转机构和Z轴辅助运动机构实现抓取和放置工具锚以及工具锚在X轴、Y轴、Z轴、上下偏转和左右偏转的调节,自动将千斤顶送到工作锚锚孔,自动穿钢绞线,自动完成张拉,然后自动移往下一个工作锚锚孔位,这样就可以完全不再需要辅助工人了;因此,本技术可以使张拉千斤顶移动到位以及安装千斤顶实现自动操作,减少张拉操作人数以及降低人工成本。
技术研发人员:朱亮亮,宁明阳,宋礼佳,何强,杨继高,杜晓林,许朋,肖璐明
受保护的技术使用者:武汉希萌科技有限公司
技术研发日:20221104
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!