一种装配式建筑外模板防偏转行走机构的制作方法
本技术属装配式建筑用外模板,具体涉及一种装配式建筑外模板防偏转行走机构。
背景技术:
1、装配式建筑是指把传统建造方式中的大量现场作业工作转移到工厂进行,在工厂加工制作好建筑用构件和配件(如楼板、墙板、楼梯、阳台等),运输到建筑施工现场,通过可靠的连接方式在现场装配安装而成的建筑。
2、装配式建筑在工厂进行浇筑的时候,会用到内模板和外模板和内模板合模后进行浇筑,一般墙体用到的内模板和外模板都比较长,在进行合模和开模的时候会出现模板偏转的现象,进而造成外模板卡死的问题,现有技术一般是在两块支撑板之间增加一个连接杆利用齿轮或者齿条进行修正,但是该种方式存在因为模具进行浇筑的时候需要发生震动造成齿轮齿条发生刚性碰撞,造成开模和合模卡顿的问题。
技术实现思路
1、鉴于此,本实用新型提供一种装配式建筑外模板防偏转行走机构,以解决现有技术中存在装配式建筑的模板在开模和合模过程中发生偏转卡死或者发生卡顿的问题。
2、为了达到上述目的,本实用新型是通过以下技术方案实现的:
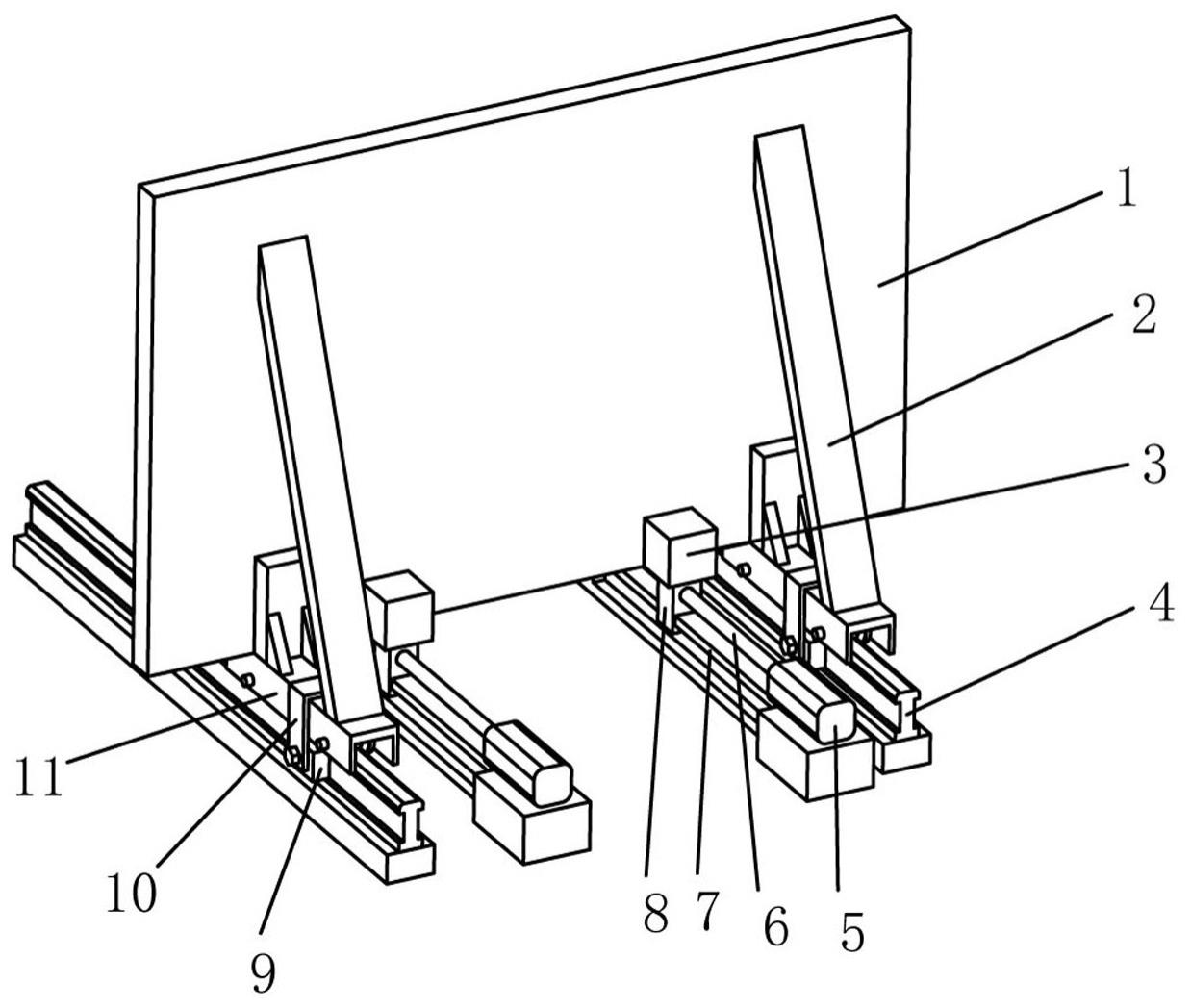
3、本实用新型提供一种装配式建筑外模板防偏转行走机构,包括用于承载外模板的支撑板、设置在承载板下方的行走轨道和设置在行走轨道一端的驱动机构,所述承载板截面为u形,承载板下方两端均设置有与行走轨道配合使用的滚轮;承载板与行走轨道之间还设置有限位机构;所述驱动机构包括两台伺服电机、固定连接在伺服电机转轴上的丝杠,套装在丝杠上的滑块,与滑块间隙配合固定安装在外模板上的连接盒;所述滑块下端滑动的安装在导向轨道上,两个伺服电机同步控制。
4、在上述的装配式建筑外模板防偏转行走机构中,作为优选的方案,所述限位机构包括滑动的卡接在行走轨道两侧的限位块,两个限位块通过u形扣固定在支撑板上。
5、在上述的装配式建筑外模板防偏转行走机构中,作为优选的方案,所述支撑板上倾斜的设置有用于固定外模板的加固杆。
6、在上述的装配式建筑外模板防偏转行走机构中,作为优选的方案,所述连接盒为一个倒扣的盒体,连接盒内侧壁与滑块之间留有间隙。
7、在上述的装配式建筑外模板防偏转行走机构中,作为优选的方案,所述限位块的长度为支撑板长度的二分之一。
8、在上述的装配式建筑外模板防偏转行走机构中,作为优选的方案,所述滑块的截面为圆形或者方形。
9、本实用新型提供一种装配式建筑外模板防偏转行走机构,具有如下有益效果:
10、本实用新型提供的装配式建筑外模板防偏转行走机构,具有结构简单,实施方便等优点,通过在行走轨道一端设置伺服电机和丝杠来实现对外模板移动的精准控制,再通过对两个伺服电机的同步控制,来实现防止外模板在移动的时候放生偏转,该设计大大提高了控制精度和有效的防止外模板在移动的时候发生偏转而产生的卡顿或者卡死现象。
11、同时,在支撑板和行走轨道之间设置限位块,进一步避免支撑板在随着滚轮在行走轨道上移动的时候发生倾斜,大大提高了开模和合模的稳定性和效率。
技术特征:
1.一种装配式建筑外模板防偏转行走机构,包括用于承载外模板的支撑板、设置在承载板下方的行走轨道和设置在行走轨道一端的驱动机构,其特征在于:所述承载板截面为u形,承载板下方两端均设置有与行走轨道配合使用的滚轮;承载板与行走轨道之间还设置有限位机构;所述驱动机构包括两台伺服电机、固定连接在伺服电机转轴上的丝杠,套装在丝杠上的滑块,与滑块间隙配合固定安装在外模板上的连接盒;所述滑块下端滑动的安装在导向轨道上,两个伺服电机同步控制。
2.根据权利要求1所述的装配式建筑外模板防偏转行走机构,其特征在于:所述限位机构包括滑动的卡接在行走轨道两侧的限位块,两个限位块通过u形扣固定在支撑板上。
3.根据权利要求1所述的装配式建筑外模板防偏转行走机构,其特征在于:所述支撑板上倾斜的设置有用于固定外模板的加固杆。
4.根据权利要求1所述的装配式建筑外模板防偏转行走机构,其特征在于:所述连接盒为一个倒扣的盒体,连接盒内侧壁与滑块之间留有间隙。
5.根据权利要求2所述的装配式建筑外模板防偏转行走机构,其特征在于:所述限位块的长度为支撑板长度的二分之一。
6.根据权利要求1所述的装配式建筑外模板防偏转行走机构,其特征在于:所述滑块的截面为圆形或者方形。
技术总结
本技术属装配式建筑用外模板技术领域,具体涉及一种装配式建筑外模板防偏转行走机构,包括用于承载外模板的支撑板、设置在承载板下方的行走轨道和设置在行走轨道一端的驱动机构,承载板下方两端均设置有与行走轨道配合使用的滚轮;承载板与行走轨道之间还设置有限位机构;本技术提供的装配式建筑外模板防偏转行走机构,具有结构简单,实施方便等优点,通过在行走轨道一端设置伺服电机和丝杠来实现对外模板移动的精准控制,再通过对两个伺服电机的同步控制,来实现防止外模板在移动的时候放生偏转,该设计大大提高了控制精度和有效的防止外模板在移动的时候发生偏转而产生的卡顿或者卡死现象。
技术研发人员:张明洋,王海洋
受保护的技术使用者:中海筑工(河南)建筑研究院有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!