一种伺服电控的泵车臂架自适应防振动控制装置
本发明涉及工程机械,尤其是一种伺服电控的泵车臂架自适应防振动控制装置。
背景技术:
1、泵车又称混凝土泵车,是当前各工程建设项目中使用较为频繁的工程机械,主要用于混凝土的快速浇筑。在混凝土工程施工过程中,混凝土的输送和浇筑是一项繁重且关键的工作。它要求迅速、及时、保证浇筑质量和降低人力劳动消耗。尤其是对于一些混凝土需求量很大的大型钢筋混凝土构筑物和高层建筑。当今混凝土泵送技术的发展已相对成熟,但混凝土泵车工作时依旧存在一些需要解决的问题,泵车工作时臂架的振动就是其中之一。泵车臂架属于柔性悬臂结构,结构固有频率较低,混凝土的泵送是脉冲式的,泵送工作时,由于泵送机构和分配机构的换向冲击、换向工作频率与结构固有频率接近,以及混凝土在附着于柔性臂架上的输送管内以脉动流速运动等因素导致臂架产生周期性的振动。根据现场测试发现当泵车排量为100%时,发动机转速为1750r/min,砼缸的泵送频率为0.32hz,末端臂架振动位移可达650mm。当泵车排量为70%时,发动机转速为1750r/min,砼缸的泵送频率为0.45hz,末端臂架振动位移可达950mm。在混凝土泵送流量出现不稳定时,泵车末端的软管将可能产生近1.7m的振动偏移。
2、在浇筑一些质量要求较高的场合时,混凝土泵车臂架的振动会造成施工浇筑时无法定位,导致浇筑精度和浇筑混凝土质量达不到要求,影响施工进程。同时减小混凝土泵车臂架振动不仅可以提高混凝土浇筑的质量和精度,同时也可避免臂架长期振动出现疲劳破坏的问题。因此,如何降低泵车工作过程中臂架的振动,已经成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明的目的是提供一种伺服电控的泵车臂架自适应防振动控制装置,能够解决泵车工作过程中臂架的振动问题,提高作业效率及施工质量,同时也能够延长泵车使用寿命。
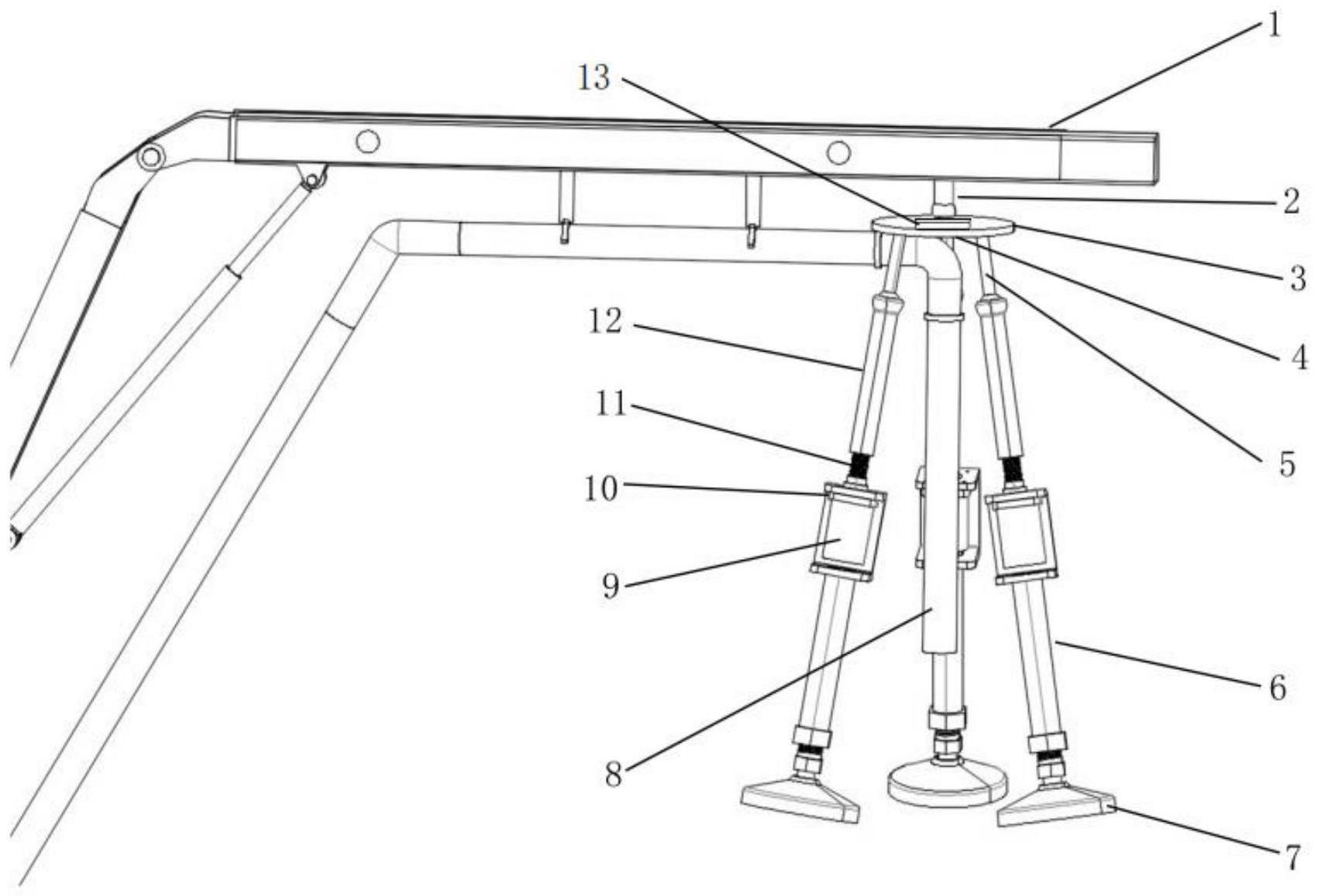
2、本发明采用的技术方案如下:一种伺服电控的泵车臂架自适应防振动控制装置,包括磁吸底座固定机构、臂架固定座以及伺服电控机构。
3、所述磁吸底座固定机构包括磁吸底座以及连接杆,磁吸底座采用螺纹对应连接到连接杆的一端,所述磁吸底座固定机构总共三组,三组磁吸底座固定机构都连接到钢筋笼或地面上。
4、所述伺服电控机构包括伺服电机、电机固定座、驱动丝杠及伸缩杆,电机固定座与连接杆固定连接,伺服电机设在电机固定座上,驱动丝杠连接到伺服电机的转动轴上,驱动丝杠套在伸缩杆内与伸缩杆之间通过螺纹对应连接。
5、所述臂架固定座包括安装座、铰接杆、固定杆及陀螺仪角度传感器,安装座为圆形结构,三个铰接杆按照120度平均分布于安装座上,铰接杆与伸缩杆连接,在安装座圆心位置设置固定杆,固定杆与臂架固定连接,陀螺仪角度传感器设置在安装座上,陀螺仪角度传感器连接到自动控制装置中,自动控制装置安装于安装座上,通过控制线缆实现与陀螺仪角度传感器及伺服电机的电气连接。
6、所述的伺服电控的泵车臂架自适应防振动控制装置的使用方法,包括以下步骤:
7、(1)伸展臂架至作业区上方,并使得磁吸底座尽量靠近钢筋笼,通过调节磁吸底座与连接杆之间的长度,使得磁吸底座固定在钢筋笼上;
8、(2)启动自动控制装置,自动控制装置读取陀螺仪角度传感器的数据判断是否安装座是否水平;
9、(3)自动控制装置根据陀螺仪角度传感器的数据启动伺服电机,伺服电机驱动丝杠转动,从而使安装座水平;
10、(4)泵送混凝土,泵送过程中臂架受到振动使安装座不水平时,自动控制装置根据陀螺仪角度传感器的数据启动伺服电机,伺服电机驱动丝杠转动,从而使安装座水平;
11、(5)转移作业区域,暂停泵送混凝土,暂停自动控制装置,通过转动磁吸底座,将磁吸底座与钢筋笼脱离,控制臂架移动至下一个工作区域,重复步骤(1)~(5);
12、(6)停止泵送混凝土,关闭自动控制装置,使磁吸底座与钢筋笼脱离,收回臂架。
13、本发明有益效果是:
14、本发明采用磁吸底座将臂架与钢筋笼固定的方式,可大大减少臂架的振动;在使用过程中,通过自动控制装置、陀螺仪角度传感器以及伺服电机来调整各磁吸底座与安装座的长度,维持安装座的水平,进而使臂架处在基准位置上,进一步的减少使用过程中的振动。泵车软管末端设置成下垂可大大减少甩管的安全隐患。臂架与钢筋笼固定后,可相对准确的控制泵车软管末端的位置,利于提交工作效率及浇筑质量。
技术特征:
1.一种伺服电控的泵车臂架自适应防振动控制装置,其特征在于,包括磁吸底座固定机构、伺服电控机构以及臂架固定座;
2.根据权利要求1所述的伺服电控的泵车臂架自适应防振动控制装置,其特征在于,所述磁吸底座固定机构总共三组,三组磁吸底座固定机构都连接到钢筋笼或地面上。
3.权利要求1所述的伺服电控的泵车臂架自适应防振动控制装置的使用方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种伺服电控的泵车臂架自适应防振动控制装置,包括磁吸底座固定机构、臂架固定座和伺服电控机构三部分。磁吸底座固定机构用于实现与钢筋笼或地面的固定连接,臂架固定座用于与泵车臂架连接支撑,伺服电控机构用于实现支撑臂架固定座,并且能够结合安装于臂架固定座底面的陀螺仪角度传感器实现臂架固定座水平角度自动调节保证臂架固定座始终处于一个水平的位置。采用本发明能够减少臂架振动带来软管大幅晃动的次生影响,从而能够避免造成人员伤亡事件发生,还能够减缓臂架振动幅度从而延缓泵车各部件的机械寿命。
技术研发人员:刘云霞,陈正龙,李威,贺良,陈宏庆,马娇,贾骁,蔡敢为
受保护的技术使用者:湖南三一工业职业技术学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!