一种梁厂混凝土成型管控方法、系统及存储介质与流程
本说明书涉及建筑施工,特别涉及一种梁厂混凝土成型管控方法、系统及存储介质。
背景技术:
1、振捣是混凝土施工过程中一个重要的环节,通过低幅高频的振动,使振捣范围内的所有颗粒均发生受迫振动。振捣降低了振捣有效范围内的混凝土拌合物的粘度和内摩擦力,改变了浆体的流动性,骨料颗粒在重力的作用下沉落滑移,大气泡在浮力作用下上浮排出或被振碎,最终达到捣实混凝土的目的。
2、cn113326550a公布了一种混凝土预制桥梁的振捣质量的实时检定方法,利用算法建立公式,然后通过向量数据库检索匹配,判断当前振捣是否合格,以解决公路工程中预制箱梁和t梁的混凝土振捣凭经验确定,导致混凝土振捣质量判断不准确的问题,但并不涉及防止混凝土振捣过程中的漏振、过振等问题。
3、因此,希望提供一种混凝土成型管控方法、系统及存储介质,能够使振捣过程更均匀,减少振捣过程中发生漏振、欠振和过振等问题的概率。
技术实现思路
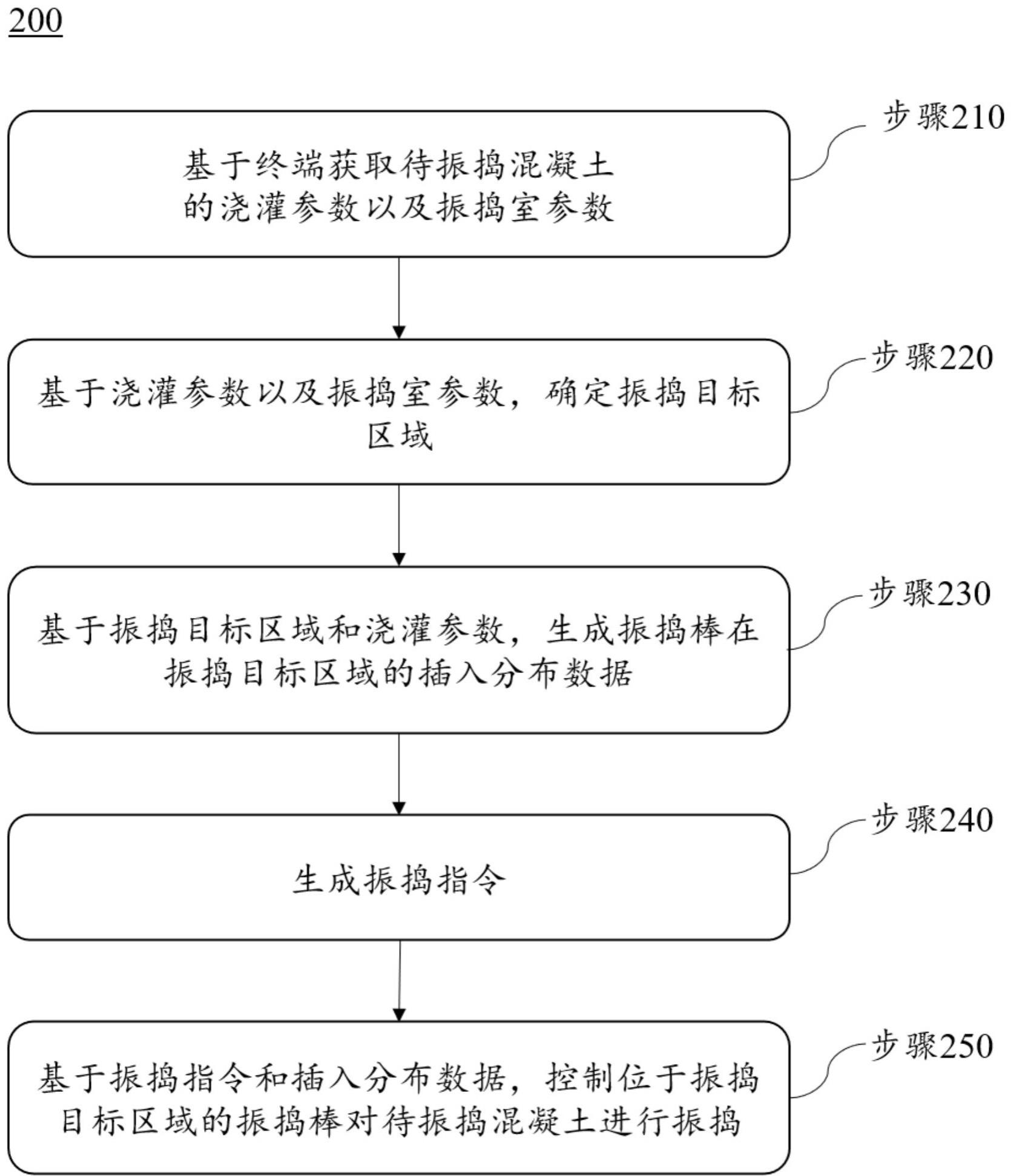
1、本说明书一个或多个实施例提供一种梁厂混凝土成型管控方法。所述方法由梁厂混凝土成型管控系统的处理器执行。所述梁厂混凝土成型管控系统包括机械振捣机构、振捣室和所述处理器,所述机械振捣机构包括振捣棒。所述方法包括:基于终端获取待振捣混凝土的浇灌参数以及振捣室参数;基于所述浇灌参数以及所述振捣室参数,确定振捣目标区域;基于所述振捣目标区域和所述浇灌参数,生成所述振捣棒在所述振捣目标区域的插入分布数据;生成振捣指令;以及基于所述振捣指令和所述插入分布数据,控制位于所述振捣目标区域的所述振捣棒对所述待振捣混凝土进行振捣。
2、本说明书实施例之一提供一种梁厂混凝土成型管控系统,所述系统包括机械振捣机构、振捣室以及处理器;所述机械振捣机构包括底盘以及连接在所述底盘上的多个振捣棒,各个振捣棒部署有传感模块;所述处理器与所述机械振捣机构通信连接,所述处理器用于:基于终端获取待振捣混凝土的浇灌参数以及振捣室参数;基于所述浇灌参数以及所述振捣室参数,确定振捣目标区域;基于所述振捣目标区域和所述浇灌参数,生成所述振捣棒在所述振捣目标区域的插入分布数据;生成振捣指令;以及基于所述振捣指令和所述插入分布数据,控制位于所述振捣目标区域的所述振捣棒对所述待振捣混凝土进行振捣。
3、本说明书一个或多个实施例提供一种计算机可读存储介质,所述存储介质存储计算机指令,当计算机读取存储介质中的计算机指令后,计算机执行梁厂混凝土成型管控方法。
技术特征:
1.一种梁厂混凝土成型管控方法,所述方法由梁厂混凝土成型管控系统的处理器执行,所述梁厂混凝土成型管控系统包括机械振捣机构、振捣室和所述处理器,所述机械振捣机构包括振捣棒;所述方法包括:
2. 根据权利要求1所述的梁厂混凝土成型管控方法,其特征在于,所述基于所述浇灌参数以及所述振捣室参数,确定振捣目标区域包括:
3. 根据权利要求1所述的梁厂混凝土成型管控方法,其特征在于,所述浇灌参数还包括振捣规避件位置分布;所述基于所述振捣目标区域和所述浇灌参数,生成所述振捣棒在所述振捣目标区域的插入分布数据包括:
4. 根据权利要求1所述的梁厂混凝土成型管控方法,其特征在于,所述生成振捣指令包括:
5. 根据权利要求4所述的梁厂混凝土成型管控方法,其特征在于,所述基于所述当前状态特征,确定下一周期内,分布在所述振捣目标区域中不同位置的所述振捣棒的振捣参数包括:
6.根据权利要求4所述的梁厂混凝土成型管控方法,其特征在于,所述基于所述当前状态特征,确定下一周期内,分布在所述振捣目标区域中不同位置的振捣棒的振捣参数还包括:
7.一种梁厂混凝土成型管控系统,其特征在于,所述系统包括机械振捣机构、振捣室以及处理器;
8. 根据权利要求7所述的梁厂混凝土成型管控系统,其特征在于,所述处理器进一步用于:
9. 根据权利要求7所述的梁厂混凝土成型管控系统,其特征在于,所述浇灌参数还包括振捣规避件位置分布;所述处理器进一步用于:
10.一种计算机可读存储介质,其特征在于,所述存储介质存储计算机指令,当计算机读取存储介质中的计算机指令后,计算机执行如权利要求1~6任一项所述的梁厂混凝土成型管控方法。
技术总结
本说明书实施例提供一种梁厂混凝土成型管控方法、系统及存储介质,所述方法由梁厂混凝土成型管控系统的处理器执行,梁厂混凝土成型管控系统包括机械振捣机构、振捣室和处理器,机械振捣机构包括底盘以及连接在底盘上的多个振捣棒,各个振捣棒部署有传感模块,该方法包括:基于终端获取待振捣混凝土的浇灌参数以及振捣室参数;基于该浇灌参数以及该振捣室参数,确定振捣目标区域;基于该振捣目标区域和浇灌参数,生成振捣棒在该振捣目标区域的插入分布数据;生成振捣指令,并基于该振捣指令和插入分布数据,控制位于振捣目标区域的振捣棒对待振捣混凝土进行振捣,该方法可以以计算机指令的形式存储在计算机可读存储介质中。
技术研发人员:王洋,陈杰,罗春雨,郝永威,黄丽,魏学龙,刘平,田生斌
受保护的技术使用者:四川公路桥梁建设集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!