一种建筑施工作业机器人的制作方法
本发明涉及智能机器人领域,具体为一种多功能内墙面智能打磨、钻孔机器人。
背景技术:
1、目前商品房住宅一般采用装配式建筑,一般混凝土墙面的打磨、钻孔是施工人员手持墙面抛光机、钻孔机进行作业,劳动强度大,工作效率低,质量一致性差,作业过程成会产生大量粉尘,严重影响工人身体健康;墙体高处需要搭设梯子或者手脚架进行施工作业,存在安全隐患,越来越多的年轻人不愿从事此类高危工作。因此需要通过智能机器人作业代替或者协助施工人员作业,达到改善建筑业工作环境,提高作业效率和质量、降低安全隐患的目的。
2、市面上大部分建筑机器人功能单一,尤其是内墙作业机器人,分为侧墙打磨机器人、天花打磨机器人、墙面钻孔机器人等,暂无集打磨、钻孔一体的多功能智能机器人,企业推进智能机械作业代替人工作业,成本高,产品使用率低。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供一种智能建筑内墙面打磨、钻孔机器人。
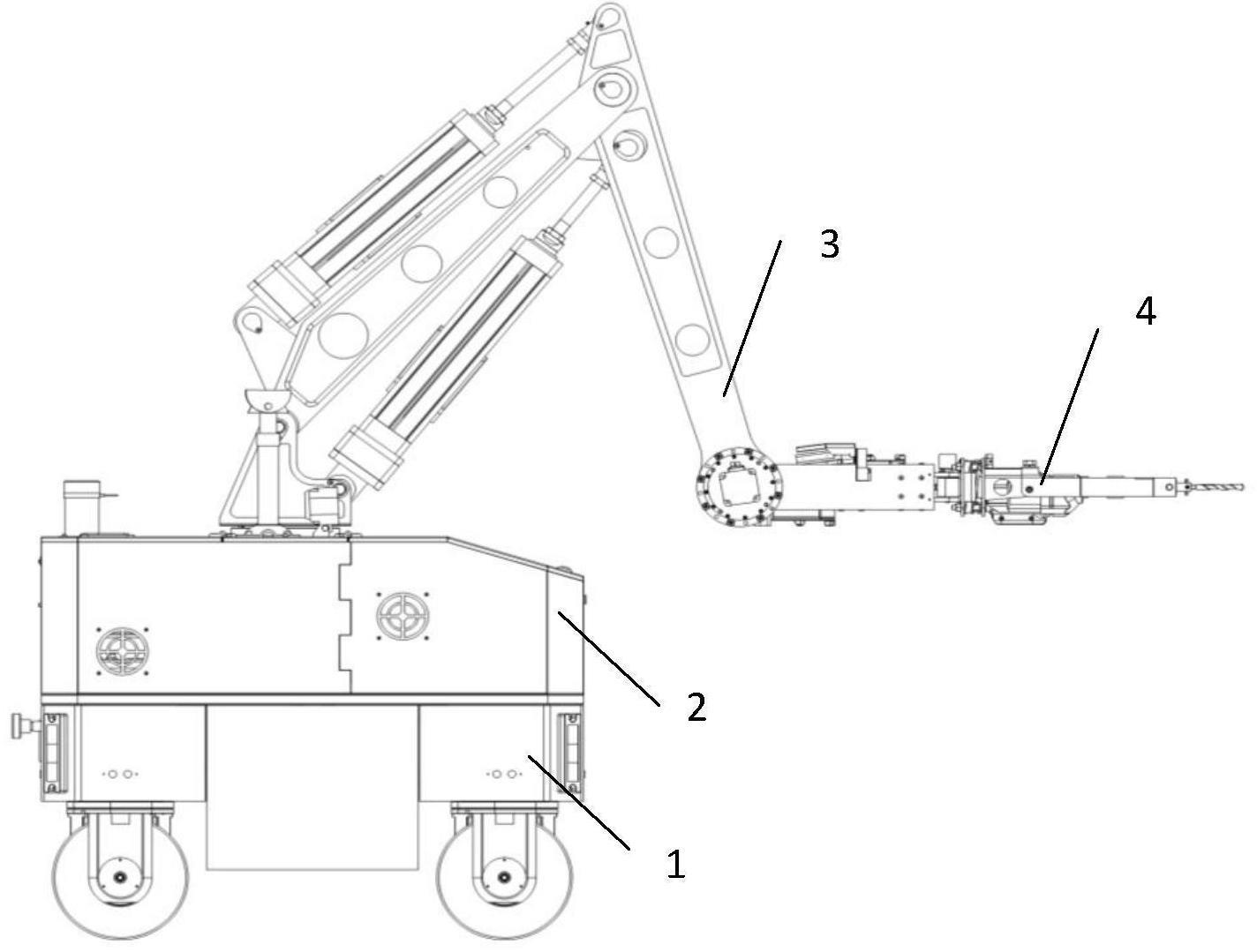
2、本发明解决技术的方案是:一种建筑施工作业机器人,包括行进组件、底座舱体、机械臂作业系统和末端作业属具;
3、所述机械臂作业系统为多自由度机械臂,机械臂末端安装末端作业属具,根据作业任务要求更换不同末端作业属具,以实现内墙面打磨或钻孔作业;所述机械臂作业系统安装在底座舱体上,底座舱体安装在行进组件上,所述行进组件配备舵轮实现直行、斜行、转弯及原地自旋全向灵活运动。
4、优选的,所述行进组件包括底盘支架,外壳体,舵轮,横移滑轨,舵轮驱动器,控制器,锂电池,工作台面,外围板;
5、锂电池置于在底盘支架中心,四周通过外围板固定;外壳体安装在底盘支架上,起行进过程中防磕碰及防尘作用;工作台面安装在底座支架上,用于固定支撑底座舱体;
6、舵轮固定在横移滑轨上,舵轮驱动器及控制器置于底盘支架两侧支板,用于实现底盘的直行、横移、斜行及自旋全向灵活运动。
7、优选的,底座舱体包括机械臂底座轴承,铰链,避障雷达,深度相机,风扇、围板,激光雷达,盖板,底盘固定销轴,底盘固定定位销,舱体框架,偏摆电缸,摆臂;
8、激光雷达固定在盖板上,用于扫描感知作业房间的环境,绘制房间行进地图;围板的前面、后面及两个侧面分别布置避障雷达,用于对运动路径上障碍物检测;深度相机布置在底座舱体前面,用于房间内三维点云扫描以及墙面质量检测;围板固定在舱体框架上,风扇固定在围板上,用于仓体内降温和散热;盖板通过铰链固定在舱体框架上,实现盖板的开合;偏摆电缸基座固定在舱体框架底部,电缸伸缩杆与摆臂相连,摆臂与底盘固定销轴固定,通过电缸伸缩运动带动销轴实现90度旋转运动,实现底座舱体与行进组件的拆分,便于整机的安装及维修。
9、优选的,所述机械臂作业系统包括机械臂基座,大臂,大臂驱动电缸,小臂驱动电缸,小臂,3号臂关节电机,3号臂外筒,3号臂内筒,3号臂伸缩电缸,末端属具偏摆电缸,末端属具连接支座;
10、大臂驱动电缸的安装座和伸缩杆分别安装在机械臂基座和大臂上,通过驱动电缸伸缩运动实现大臂的俯仰运动;小臂驱动电缸的安装座和伸缩杆分别安装在大臂和小臂上,通过驱动电缸伸缩运动实现小臂相对大臂的俯仰运动;
11、3号臂关节电机基座固定在小臂上,3号臂外筒通过轴承与3号臂关节电机输出轴相连,3号臂伸缩电缸固定在关节电机输出轴上,关节电机带动3号臂实现俯仰旋转运动;3号臂内筒安装在3号臂伸缩电缸的伸缩杆上,通过电缸伸缩运动实现3号臂内筒与外筒之间的伸缩运动,用于打孔作业;
12、末端属具偏摆电缸固定在3号臂外筒上,末端属具连接支座与3号臂内筒相连,末端作业属具上连接销轴穿入偏摆电缸伸缩杆末端的鱼眼轴承孔,末端作业属具上机械臂接口与连接支座通过销轴固定,通过电缸伸缩运动实现末端属具的相对中心的左右横摆旋转运动。
13、优选的,所述末端作业属具包括固定机构、用于打磨墙面的打磨属具、用于墙面钻孔的钻孔属具以及用于检测作业过程中末端作业属具与墙面之间作用力的压力传感器;所述固定机构用于实现与机械臂作业系统连接,并为打磨属具或钻孔属具提供打磨动力。
14、优选的,所述的打磨属具包括打磨盘、吸尘防尘结构和支撑结构,所述吸尘防尘结构包括防尘罩和吸尘口,所述吸尘口位于所述防尘罩的背部,用于吸取打磨作业过程中产生的粉尘,所述防尘罩安装在所述打磨盘的背部,多组支撑结构安装于所述防尘罩的背部,用于侧墙与侧墙之间阴角打磨、侧墙与天花之间阴角打磨时,待防尘罩接触到阴角时,受力回收局部防尘罩,实现天花与侧墙之间、侧墙与侧墙之间阴角无死角打磨,所述防尘罩与固定机构的动力输出轴转动连接。
15、优选的,每组支撑结构包括支撑杆、挡块,两个支撑架固定在防尘罩的背部,支撑杆上套装弹簧并安装在两个支撑架之间,支撑杆相对打磨盘的外端固接挡块,用于阻止打磨作业时打磨盘的外翻.
16、优选的,所述打磨属具还包括盖板,盖板一端穿过所述支撑杆,并在弹簧作用下抵住外侧支撑架内壁,所述盖板另一端为与所述防尘罩背部弧度相匹配的弧面,所述盖板能够根据打磨作业过程中的受力情况沿着支撑杆在防尘罩上滑动。
17、优选的,所述的钻孔属具包括钻头,电钻转电锤接头,钻夹头,钻头接头,钻头支架;钻头接头装到固定机构的动力输出轴上,钻夹头固定在钻头接头上,电钻转电锤接头安装在钻夹头上,通过紧固件固定在钻头支架上,钻头支架通过顶部、侧面紧固件与固定机构的连接固定。
18、优选的,所述的固定机构包括电机、电机支架、后支架和减震弹簧;所述电机支架为开口向下的框架结构,电机安装在所述框架内部并固定;所述电机支架的后端通过连接杆安装后支架,所述连接杆的数量至少三根,减震弹簧套设于所述连接杆;后支架外端面固接机械臂接口以及电缸连接销轴,用于与机械臂末端及偏摆电缸连接。
19、本发明与现有技术相比的有益效果是:本发明为集打磨、钻孔一体的多功能智能机器人,作业者根据作业任务要求,通过更换打磨属具,实现侧墙、天花的拼缝及错台的连贯打磨作业;更换钻孔机构,实现面侧墙、天花的钻孔作业;一方面,机械作业代替或者协助施工人员作业,提高作业效率和质量;另一方面,提高产品的使用率,间接降低了企业推进智能机械作业代替人工作业的成本。
20、建筑机器人采用模块化设计提高机器人的可维护性。模块化设计可以将机器人拆分成行进组件、底座舱体、机械臂作业系统和末端作业属具不同部分,使得维修时可以只更换需要更换的部件,而不必将整个机器人拆开。此外,模块化设计还能够降低维修时的难度和维修时间,缩短机器人的停机时间,提高工作效率。
技术特征:
1.一种建筑施工作业机器人,其特征在于:包括行进组件、底座舱体、机械臂作业系统和末端作业属具;
2.根据权利要求1所述的机器人,其特征在于:所述行进组件包括底盘支架,外壳体,舵轮,横移滑轨,舵轮驱动器,控制器,锂电池,工作台面,外围板;
3.根据权利要求1所述的机器人,其特征在于:底座舱体包括机械臂底座轴承,铰链,避障雷达,深度相机,风扇、围板,激光雷达,盖板,底盘固定销轴,底盘固定定位销,舱体框架,偏摆电缸,摆臂;
4.根据权利要求1所述的机器人,其特征在于:所述机械臂作业系统包括机械臂基座,大臂,大臂驱动电缸,小臂驱动电缸,小臂,3号臂关节电机,3号臂外筒,3号臂内筒,3号臂伸缩电缸,末端属具偏摆电缸,末端属具连接支座;
5.根据权利要求3所述的机器人,其特征在于:所述末端作业属具包括固定机构、用于打磨墙面的打磨属具、用于墙面钻孔的钻孔属具以及用于检测作业过程中末端作业属具与墙面之间作用力的压力传感器;所述固定机构用于实现与机械臂作业系统连接,并为打磨属具或钻孔属具提供打磨动力。
6.根据权利要求5所述的机器人,其特征在于:所述的打磨属具包括打磨盘、吸尘防尘结构和支撑结构,所述吸尘防尘结构包括防尘罩和吸尘口,所述吸尘口位于所述防尘罩的背部,用于吸取打磨作业过程中产生的粉尘,所述防尘罩安装在所述打磨盘的背部,多组支撑结构安装于所述防尘罩的背部,用于侧墙与侧墙之间阴角打磨、侧墙与天花之间阴角打磨时,待防尘罩接触到阴角时,受力回收局部防尘罩,实现天花与侧墙之间、侧墙与侧墙之间阴角无死角打磨,所述防尘罩与固定机构的动力输出轴转动连接。
7.根据权利要求6所述的机器人,其特征在于:每组支撑结构包括支撑杆、挡块,两个支撑架固定在防尘罩的背部,支撑杆上套装弹簧并安装在两个支撑架之间,支撑杆相对打磨盘的外端固接挡块,用于阻止打磨作业时打磨盘的外翻。
8.根据权利要求7所述的机器人,其特征在于:所述打磨属具还包括盖板,盖板一端穿过所述支撑杆,并在弹簧作用下抵住外侧支撑架内壁,所述盖板另一端为与所述防尘罩背部弧度相匹配的弧面,所述盖板能够根据打磨作业过程中的受力情况沿着支撑杆在防尘罩上滑动。
9.根据权利要求5所述的机器人,其特征在于:所述的钻孔属具包括钻头,电钻转电锤接头,钻夹头,钻头接头,钻头支架;钻头接头装到固定机构的动力输出轴上,钻夹头固定在钻头接头上,电钻转电锤接头安装在钻夹头上,通过紧固件固定在钻头支架上,钻头支架通过顶部、侧面紧固件与固定机构的连接固定。
10.根据权利要求5所述的机器人,其特征在于:所述的固定机构包括电机、电机支架、后支架和减震弹簧;
技术总结
本发明涉及一种建筑施工作业机器人,包括行进组件、底座舱体、机械臂作业系统和末端作业属具;所述机械臂作业系统为多自由度机械臂,机械臂末端安装末端作业属具,根据作业任务要求更换不同末端作业属具,以实现内墙面打磨或钻孔作业;所述机械臂作业系统安装在底座舱体上,底座舱体安装在行进组件上,所述行进组件配备舵轮实现直行、斜行、转弯及原地自旋全向灵活运动。
技术研发人员:刘群,杨斌,杨扬,张立峰,陈日程,柯明冠,张锋,孙启量,杨雅熙
受保护的技术使用者:航天物联网技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!