一种平整机器人用自动采样回收与填补装置的制作方法
本发明涉及建筑装修,具体为一种平整机器人用自动采样回收与填补装置。
背景技术:
1、在建筑施工的过程中,水泥和混凝土浇筑的底面会存在不平整的现象,因此需要通过底面平整机对水泥底面进行整平工作,平整机器人在工作时往往是依靠压力将不平整的地面轧平,使得建筑施工的效果得到提升,然而现有的地面整平机在使用的过程中还是存在一定的缺陷:
2、由于地面上的水泥腻子均匀度参差不齐,有凸起也有凹槽,现有的平整机器人仅仅是依靠压力将表面不平整的水泥腻子轧平,不能将地面多余的腻子回收并填补至需要填充腻子的位置,不仅会导致不同区域的水泥腻子的密度有所差异,平整效果欠佳,存在地表后期变形的风险,而且会将多余的水泥腻子刮抹至机器侧边或行驶线路的末端,还需频繁的进行人工修整,费时费力,导致工作效率低下。
3、鉴于上述问题,非常有必要设计一种整机器人用自动采样回收与填补装置,来解决上述出现的问题。
技术实现思路
1、针对上述存在的技术不足,本发明的目的是提供一种平整机器人用自动采样回收与填补装置,不仅能够将地面多余的腻子回收并填补至需要填充腻子的位置,平整地面质量好,平整效果佳,而且能够避免多余的水泥腻子漫延至装置外围,减少了人工二次修整的频率,省时省力,节约成本,大大提高了工作效率。
2、为解决上述技术问题,本发明采用如下技术方案。
3、本发明提供一种平整机器人用自动采样回收与填补装置,包括与主机连接的用于平整地面的平整结构,所述平整结构包括壳体,所述壳体内设置有储料桶和回收结构,所述回收结构与所述储料桶上端相连通,所述储料桶下端连接有若干个下料管,所述下料管的下端开口设置于所述壳体下壁;所述主机内设置有plc控制器,回收结构和下料结构均与所述plc控制器电连接。
4、优选地,所述回收结构包括滚筒缸、回收滚筒和泵体,所述滚筒缸内开设有圆柱形的内腔,所述滚筒缸设置于壳体内,所述壳体靠近主机一端的下部开口,所述开口与所述内腔相连通,所述回收滚筒通过转轴转动设置于滚筒缸内的所述内腔中,回收滚筒的长度与内腔的长度相同,所述滚筒的轴向方向呈水平布置,所述泵体设置于壳体内,泵体的进料端通过导管和滚筒缸的内腔相连通,所述泵体的下料端通过导管与所述储料桶的顶部相连通。
5、优选地,所述滚筒缸侧壁上固定设置有电机,所述电机的输出轴与所述转轴固定连接;所述电机与所述plc控制器电连接。
6、优选地,所述回收滚筒侧壁上周向设置有若干个等间距排列的拨板,所述拨板与回收滚筒的轴向方向平行;所述拨板远离回收滚筒的一端始终与内腔的内壁相接处。
7、优选地,所述滚筒缸的两个底壁上对称开设有一个呈圆弧形布置的通孔,所述通孔所在的圆心在回收滚筒的轴线上,所述通孔所在圆弧的半径大于回收滚筒的半径,所述通孔所在圆弧的半径小于内腔的半径;其中一个所述通孔通过导管与所述泵体的进料端密封连接,另一个所述通孔连通滚筒缸的内部和外部。
8、优选地,若干个所述下料管的下端开口在所述壳体下壁呈等间距的直线排布,所述直线与所述回收滚筒的轴线平行;每一个所述下料管上连接有一个电磁阀,若干个所述电磁阀分别与plc控制器电连接。
9、优选地,所述壳体下壁在下料管与所述回收滚筒之间开设有一个通槽,所述通槽的方向与所述回收滚筒的轴线平行;所述通槽内设置有若干个等间距排列的测距仪,所述测距仪的工作方向垂直于所述壳体下壁;若干个所述测距仪分别与plc控制器电连接,所述测距仪的数量与电磁阀的数量相同且一一对应。
10、本发明一种平整机器人用自动采样回收与填补装置的有益效果具体如下:
11、1、本发明通过回收滚筒上的拨板将多余的水泥腻子传输至滚筒缸内的内腔中,通过泵体的强力负压将多余的水泥腻子排放至储料桶内以备二次使用,不仅节约成本,而且防止了多余的水泥腻子漫延至装置外围,减少了人工二次修整的频率,省时省力,大大提高了工作效率;
12、2、本发明通过多个测距仪实时监测其正下方的地面上的水泥腻子上表面至测距仪之间的距离,若距离数值大于设定值,则说明地面在该位置处的呈现下凹状态,需补充水泥腻子,根据装置当前行驶速度与测距仪、电磁阀之间的距离,计算出plc控制器发出命令的延时时间,plc控制器控制对应的电磁阀打开,排出出料桶内的部分水泥腻子在下凹的地面上,本发明能够自动填补需要填充腻子的位置,平整地面质量好,平整效果佳。
技术特征:
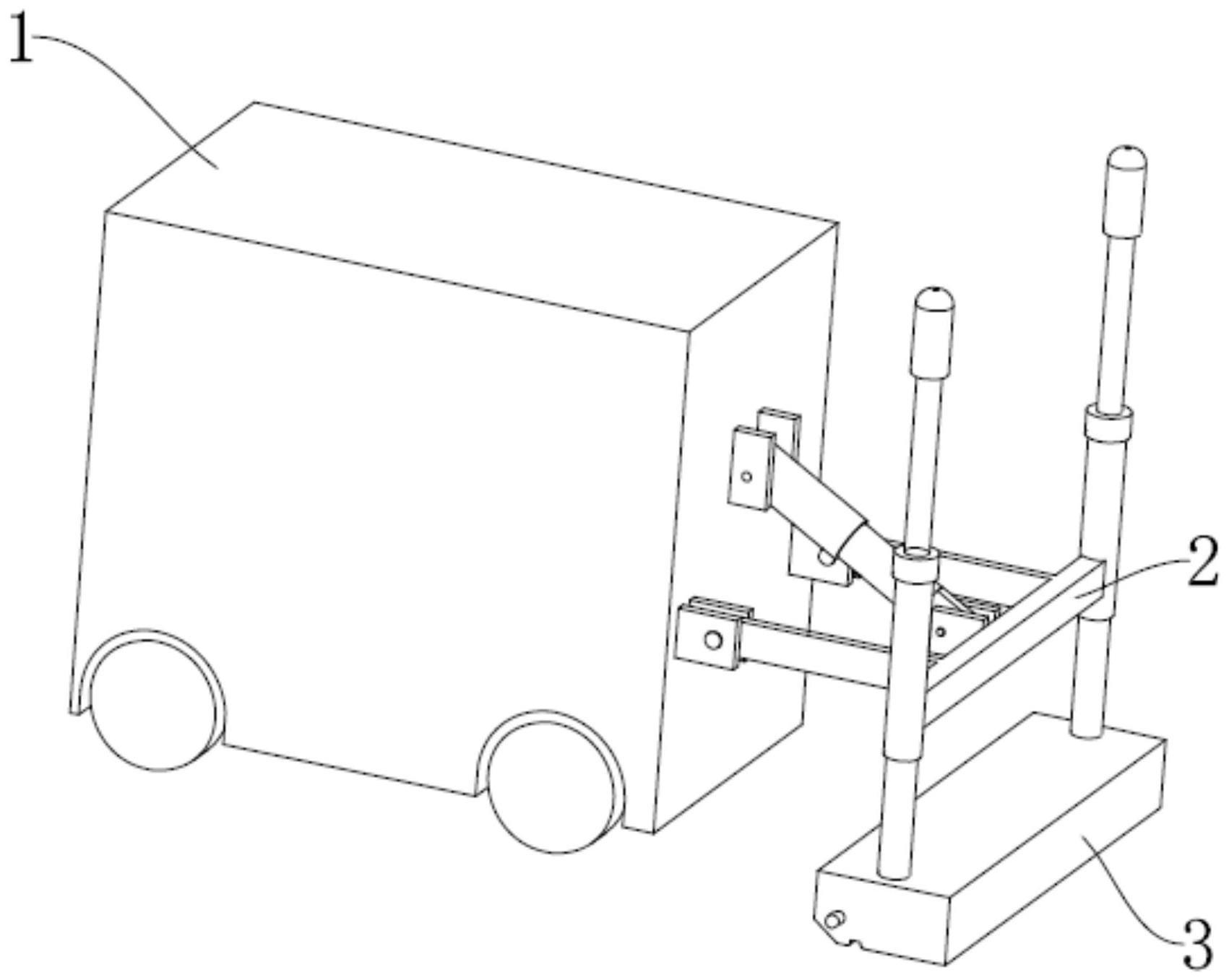
1.一种平整机器人用自动采样回收与填补装置,其特征在于,包括与主机(1)连接的用于平整地面的平整结构(3),所述平整结构(3)包括壳体(4),所述壳体(4)内设置有储料桶(5)和回收结构(6),所述回收结构(6)与所述储料桶(5)上端相连通,所述储料桶(5)下端连接有若干个下料管(7),所述下料管(7)的下端开口设置于所述壳体(4)下壁;所述主机(1)内设置有plc控制器,回收结构(6)和下料结构均与所述plc控制器电连接。
2.根据权利要求1所述的一种平整机器人用自动采样回收与填补装置,其特征在于,所述回收结构(6)包括滚筒缸(8)、回收滚筒(9)和泵体(10),所述滚筒缸(8)内开设有圆柱形的内腔(11),所述滚筒缸(8)设置于壳体(4)内,所述壳体(4)靠近主机(1)一端的下部开口,所述开口与所述内腔(11)相连通,所述回收滚筒(9)通过转轴转动设置于滚筒缸(8)内的所述内腔(11)中,回收滚筒(9)的长度与内腔(11)的长度相同,所述滚筒的轴向方向呈水平布置,所述泵体(10)设置于壳体(4)内,泵体(10)的进料端通过导管(12)和滚筒缸(8)的内腔(11)相连通,所述泵体(10)的下料端通过导管(12)与所述储料桶(5)的顶部相连通。
3.根据权利要求2所述的一种平整机器人用自动采样回收与填补装置,其特征在于,所述滚筒缸(8)侧壁上固定设置有电机(13),所述电机(13)的输出轴与所述转轴固定连接;所述电机(13)与所述plc控制器电连接。
4.根据权利要求2所述的一种平整机器人用自动采样回收与填补装置,其特征在于,所述回收滚筒(9)侧壁上周向设置有若干个等间距排列的拨板(14),所述拨板(14)与回收滚筒(9)的轴向方向平行;所述拨板(14)远离回收滚筒(9)的一端始终与内腔(11)的内壁相接处。
5.根据权利要求4所述的一种平整机器人用自动采样回收与填补装置,其特征在于,所述滚筒缸(8)的两个底壁上对称开设有一个呈圆弧形布置的通孔(15),所述通孔(15)所在的圆心在回收滚筒(9)的轴线上,所述通孔(15)所在圆弧的半径大于回收滚筒(9)的半径,所述通孔(15)所在圆弧的半径小于内腔(11)的半径;其中一个所述通孔(15)通过导管(12)与所述泵体(10)的进料端密封连接,另一个所述通孔(15)连通滚筒缸(8)的内部和外部。
6.根据权利要求2所述的一种平整机器人用自动采样回收与填补装置,其特征在于,若干个所述下料管(7)的下端开口在所述壳体(4)下壁呈等间距的直线排布,所述直线与所述回收滚筒(9)的轴线平行;每一个所述下料管(7)上连接有一个电磁阀(16),若干个所述电磁阀(16)分别与plc控制器电连接。
7.根据权利要求6所述的一种平整机器人用自动采样回收与填补装置,其特征在于,所述壳体(4)下壁在下料管(7)与所述回收滚筒(9)之间开设有一个通槽(17),所述通槽(17)的方向与所述回收滚筒(9)的轴线平行;所述通槽(17)内设置有若干个等间距排列的测距仪(18),所述测距仪(18)的工作方向垂直于所述壳体(4)下壁;若干个所述测距仪(18)分别与plc控制器电连接,所述测距仪(18)的数量与电磁阀(16)的数量相同且一一对应。
技术总结
本发明公开了一种平整机器人用自动采样回收与填补装置,包括与主机连接的用于平整地面的平整结构,所述平整结构包括壳体,所述壳体内设置有储料桶和回收结构,所述回收结构与所述储料桶上端相连通,所述储料桶下端连接有若干个下料管,所述下料管的下端开口设置于所述壳体下壁;所述主机内设置有PLC控制器,回收结构和下料结构均与所述PLC控制器电连接。本发明不仅能够将地面多余的腻子回收并填补至需要填充腻子的位置,平整地面质量好,平整效果佳,而且能够避免多余的水泥腻子漫延至装置外围,减少了人工二次修整的频率,省时省力,节约成本,大大提高了工作效率。
技术研发人员:杨振贤,梁兵
受保护的技术使用者:上海自筑科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!