一种钢筋自动捆绑系统
本发明涉及智能建造,具体为一种钢筋自动捆绑系统。
背景技术:
1、近年来建筑业存在建筑工人紧缺、老龄化等问题,目前绑扎钢筋仍需要大量的人力完成,且最常见的建筑工人伤害类型就是因为长时间绑扎钢筋造成的肌肉骨骼损伤,因此采用机器人代替人工的智能建造变得尤为重要,在钢筋的绑扎过程已经出现了使用自动钢筋绑扎机器人进行钢筋的绑扎过程,其通过视觉识别钢筋交叉中心点即钢筋绑扎点,并定位绑扎点空间位置,由绑扎模块完成绑扎,其中计算机视觉识别定位绑扎点是钢筋绑扎的关键问题之一,目前有通过二维码标签识别定位钢筋绑扎点、通过激光监测器识别定位钢筋绑扎点以及采用深度图像识别定位钢筋绑扎点,相比于二维码标签和激光识别方法因图像信息缺失易产生较大误差问题,使用计算机视觉可以获得更丰富的图像信息和更直观的可视化结果。
2、然而现有的计算机视觉系统在对钢筋绑扎点进行识别的过程中,由于外界干扰等其他因素会导致识别准确率和定位精度不理想的问题,为此,本申请提出了一种钢筋自动捆绑系统。
技术实现思路
1、本发明的目的在于提供一种钢筋自动捆绑系统,以解决上述背景技术中提出的问题。
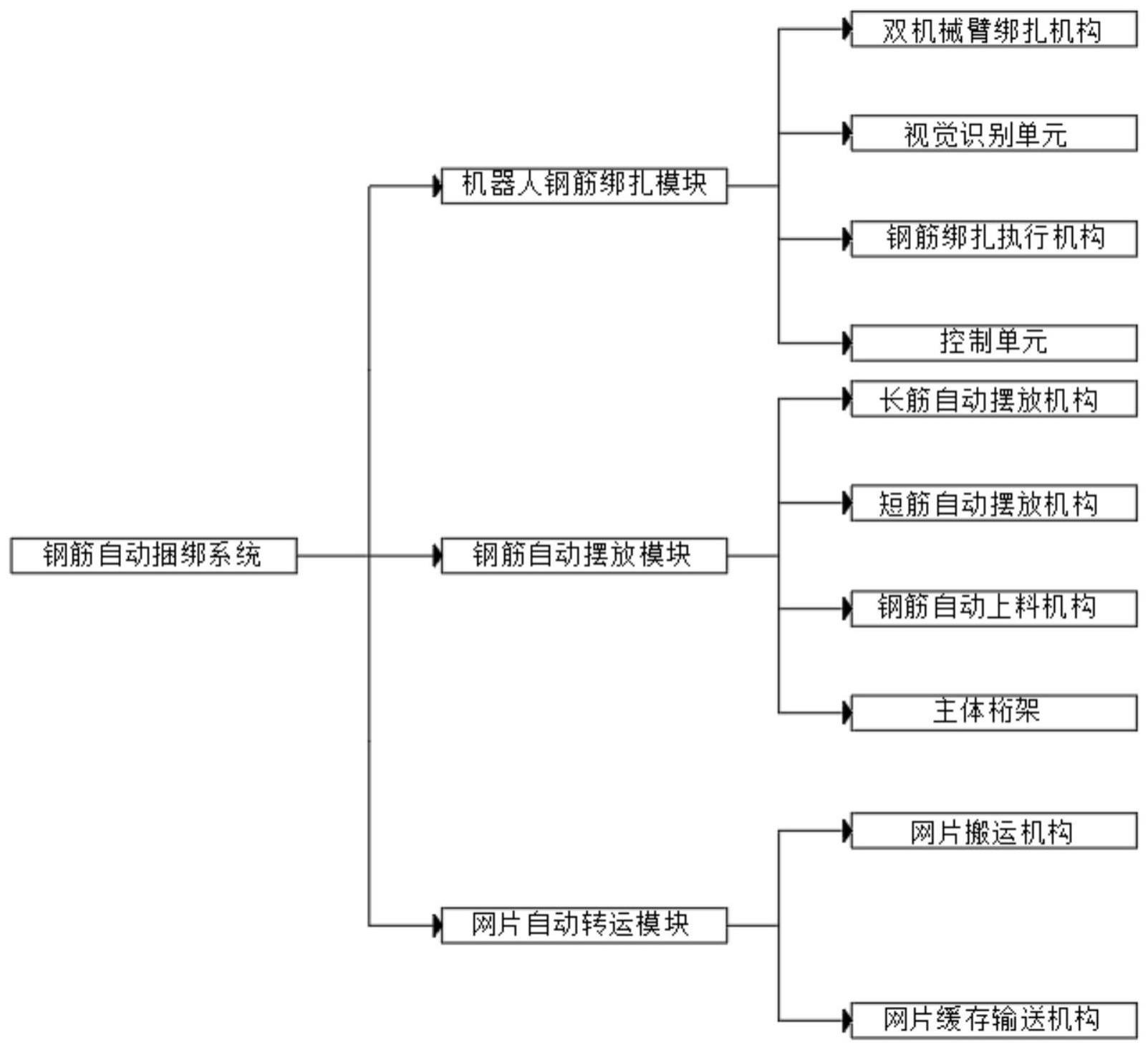
2、为实现上述目的,一种钢筋自动捆绑系统,所述系统包括:
3、机器人钢筋绑扎模块,所述机器人钢筋绑扎模块包括双机械臂绑扎机构、视觉识别单元和钢筋绑扎执行机构;
4、钢筋自动摆放模块,所述钢筋自动摆放模块包括固定安装的主体桁架以及活动安装在主体桁架上的长筋自动摆放机构、短筋自动摆放机构和钢筋自动上料机构;
5、网片自动转运模块,所述网片自动转运模块包括网片搬运机构以及网片缓存输送机构。
6、优选的:所述双机械臂绑扎机构为六自由度机械手臂,且机械臂的末端固定安装有钢筋绑扎机。
7、优选的:所述视觉识别单元包括固定安装在主体桁架上的高清相机,且视觉识别单元计算钢筋交叉位置的空间坐标的步骤如下,图像数据采集和处理,将采集到的图像制作成数据集,检测识别目标,获得绑扎点目标框,提取轮廓定位绑扎点在图像中的位置,确定绑扎点坐标,绑扎点视差估计,空间信息计算,基于绑扎点视差计算绑扎点深度,利用坐标转换获得绑扎点即交叉点的空间信息。
8、优选的:所述高清相机包括单目相机和双目相机,且单、双目相机在图像数据采集过程都位于相同的水平高度位置。
9、优选的:所述绑扎点目标框获取过程为,将单目相机采集的图像制作成图像数据集,同时将双目相机采集到的左相机图像数据制作成数据集,将单目相机的数据集和双目相机的左图数据集输入至yolov4算法神经网络模型训练测试,从而获得左图钢筋绑扎点目标框。
10、优选的:所述交叉点采用十字物体中心定位法进行钢筋绑扎点的获取,并对图像进行灰度化、中值滤波、二值化以及开运算的预处理。
11、优选的:所述钢筋自动上料机构一侧与送料小车对接。
12、优选的:所述网片缓存输送机构放置有绑扎好的网片,且网片缓存输送机构与网片上模台连接。
13、本发明相较于现有技术,其有益效果为:
14、本发明能够实现网状钢筋交叉点的绑扎,降低劳动强度,节省人工成本,钢筋绑扎机器人可实现钢筋绑扎过程的全自动化,采用模块化结构,便于灵活组合,结合自动上料和自动控制能够快速准确的实现网格钢筋的位置精确摆放、视觉检测、定位、绑扎等操作,具有自主移动、自动识别、自动绑扎、自动横纵筋摆放、自动钢筋网片转运、自动规划行走路径等功能。
技术特征:
1.一种钢筋自动捆绑系统,其特征在于,所述系统包括:
2.根据权利要求1所述的一种钢筋自动捆绑系统,其特征在于:所述双机械臂绑扎机构为六自由度机械手臂,且机械臂的末端固定安装有钢筋绑扎机。
3.根据权利要求2所述的一种钢筋自动捆绑系统,其特征在于:所述视觉识别单元包括固定安装在主体桁架上的高清相机,且视觉识别单元计算钢筋交叉位置的空间坐标的步骤如下,图像数据采集和处理,将采集到的图像制作成数据集,检测识别目标,获得绑扎点目标框,提取轮廓定位绑扎点在图像中的位置,确定绑扎点坐标,绑扎点视差估计,空间信息计算,基于绑扎点视差计算绑扎点深度,利用坐标转换获得绑扎点即交叉点的空间信息。
4.根据权利要求3所述的一种钢筋自动捆绑系统,其特征在于:所述高清相机包括单目相机和双目相机,且单、双目相机在图像数据采集过程都位于相同的水平高度位置。
5.根据权利要求4所述的一种钢筋自动捆绑系统,其特征在于:所述绑扎点目标框获取过程为,将单目相机采集的图像制作成图像数据集,同时将双目相机采集到的左相机图像数据制作成数据集,将单目相机的数据集和双目相机的左图数据集输入至yolov4算法神经网络模型训练测试,从而获得左图钢筋绑扎点目标框。
6.根据权利要求5所述的一种钢筋自动捆绑系统,其特征在于:所述交叉点采用十字物体中心定位法进行钢筋绑扎点的获取,并对图像进行灰度化、中值滤波、二值化以及开运算的预处理。
7.根据权利要求6所述的一种钢筋自动捆绑系统,其特征在于:所述钢筋自动上料机构一侧与送料小车对接。
8.根据权利要求7所述的一种钢筋自动捆绑系统,其特征在于:所述网片缓存输送机构放置有绑扎好的网片,且网片缓存输送机构与网片上模台连接。
技术总结
本发明涉及智能建造技术领域,一种钢筋自动捆绑系统,机器人钢筋绑扎模块,所述机器人钢筋绑扎模块包括双机械臂绑扎机构、视觉识别单元和钢筋绑扎执行机构,钢筋自动摆放模块,所述钢筋自动摆放模块包括固定安装的主体桁架以及活动安装在主体桁架上的长筋自动摆放机构、短筋自动摆放机构和钢筋自动上料机构,网片自动转运模块,所述网片自动转运模块包括网片搬运机构以及网片缓存输送机构,本发明的钢筋自动捆绑系统能够实现网状钢筋交叉点的绑扎,降低劳动强度,节省人工成本,钢筋绑扎机器人可实现钢筋绑扎过程的全自动化。
技术研发人员:何俊,芦关山,孙博
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!