一种混凝土自动化成型系统的制作方法
本发明属于混凝土制品制作的,具体涉及一种混凝土自动化成型系统。
背景技术:
1、混凝土成型是指能够完成混凝土制品的工艺,大致可分为配料、搅拌、布料、成型、硬化养护、拆模等工序,具体地,对混凝土原料进行配料,按一定比例加入到搅拌斗中,在搅拌斗中搅拌后倒入布料斗中进行布料,布料斗将混凝土倒入试模中,然后进行成型养护,养护完成后将制品由试模中拆出。传统工艺中,各工序之间的衔接主要依赖人工完成。
2、为提高混凝土成型的自动化程度,申请公布号为cn114858555a的发明专利申请公开了一种混凝土试块全自动智能养护及强度检测系统,其包括养护单元,养护单元包括立库(即该专利申请中的养护架)和堆垛机,堆垛机能够将待养护的试模放入立库等进行养护。
3、虽然现有技术能够实现试模自动进入立库中进行养护,但是配料、搅拌、布料、拆模等工序的衔接仍由人工完成,劳动强度较大,效率较低。
技术实现思路
1、本发明提供一种混凝土自动化成型系统,以解决现有技术中工序间衔接需由人工完成而导致自动化程度低、劳动强度大的技术问题。
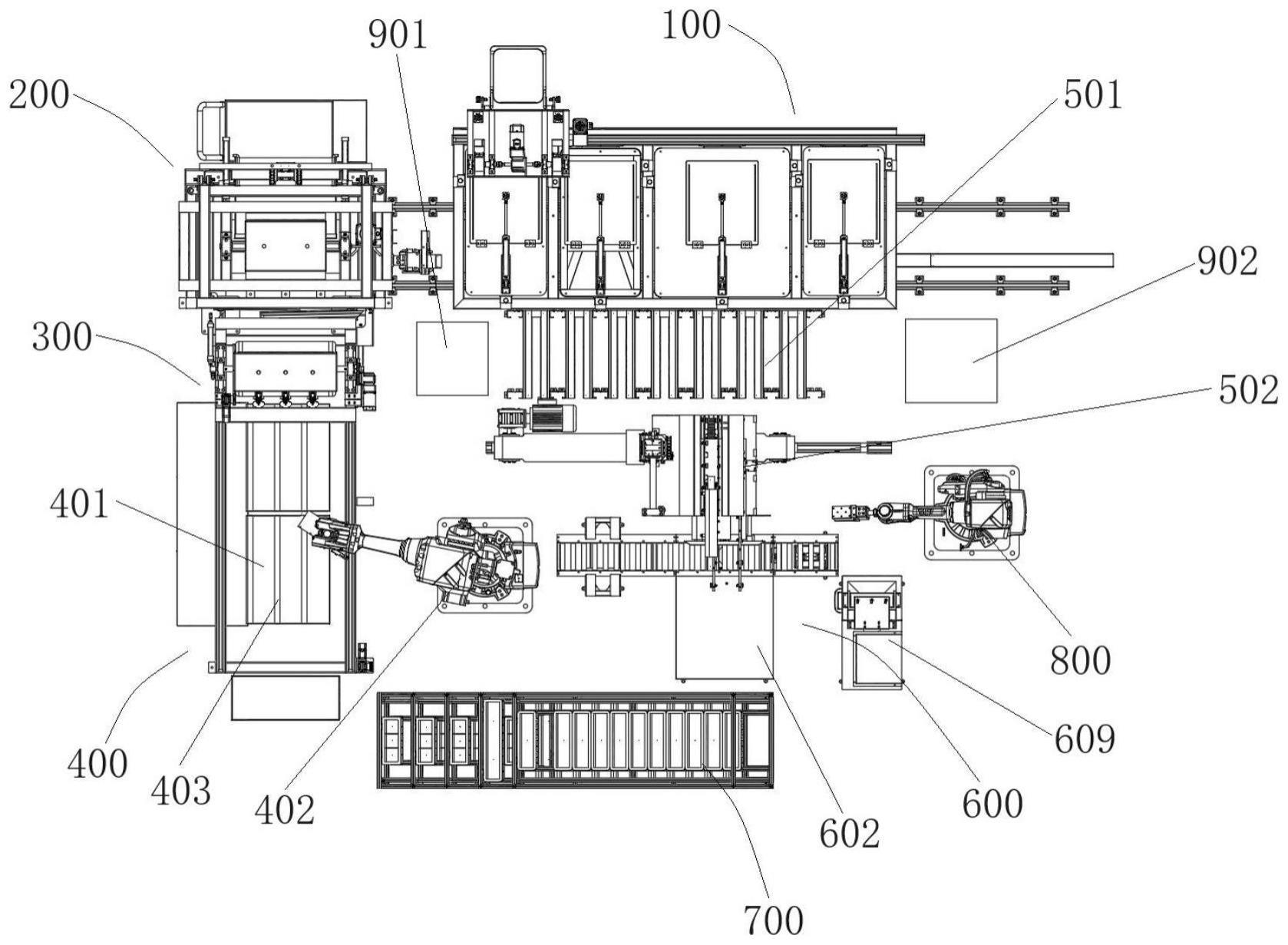
2、为解决上述问题,本发明提供的混凝土自动化成型系统采用如下技术方案:一种混凝土自动化成型系统,包括:
3、储料设备,包括储料机架、多个储料单元,多个储料单元设于储料机架上并沿第一方向依次排布,储料单元用于向下放料;
4、搅拌设备,包括接料轨道、搅拌装置、提升装置,接料轨道沿所述第一方向延伸并布置在各储料单元的下方,搅拌装置包括滑动装配在接料轨道上的搅拌机架以及绕第一方向延伸的轴线转动装配在搅拌机架上的搅拌仓,搅拌仓用于承接储料单元的物料并向布料斗内倒料;提升装置位于接料轨道一端并用于驱动搅拌装置升降;
5、布料设备,包括布料轨道、布料斗,布料轨道沿第二方向延伸,第二方向垂直于所述第一方向,布料斗滑动装配在布料轨道上,且布料斗可绕第一方向延伸的轴线转动布置,以承接搅拌仓倾倒的混凝土并向试模内布料;
6、振动插捣设备,包括振动台和插捣装置,振动台布置在布料轨道的下方,振动台用于放置试模;插捣装置用于对试模内的混凝土进行插捣;
7、试模养护设备,包括立库以及码垛机,立库沿第一方向延伸,码垛机用于将试模放入立库中,振动插捣设备还包括将振动插捣后的试模放至码垛机待抓取位置的第一机器人;
8、拆模设备,用于对试模进行拆除;
9、空试模储存设备,用于储存空的试模,所述第一机器人还用于将空的试模放至振动台上;
10、在第一方向上,所述储料设备、试模养护设备、拆模设备、空试模储存设备位于布料设备的同一侧;
11、在第二方向上,储料设备、试模养护设备、拆模设备、空试模储存设备依次布置。
12、有益效果是:利用搅拌设备中可移动的搅拌装置进行接料和搅拌,提升装置将搅拌装置置于高位并将混凝土倾倒至布料斗内,布料斗行走并进行布料,第一机器人将振动插捣后的试模放至码垛机能够抓取的位置,随后码垛机将试模放至立库中进行养护,养护后码垛机再将试模放在拆模设备上进行拆模,而第一机器人同时起到将空的试模放在振动台上的作用。本发明中各工序自身以及各工序之间的衔接均实现自动化操作,降低了人工参与程度,劳动强度更低。而且储料设备、布料设备、拆模设备围绕立库进行布置,方便进行布料和试块拆出后的转运。
13、进一步地,拆模设备包括用于沿第一方向输送试模的输送机以及拆模装置,所述码垛机用于将立库中的试模放至输送机上,混凝土自动化成型系统还包括第二机器人,第二机器人用于将输送机上的试模放至拆模装置上。
14、进一步地,拆模设备还包括位于输送机侧部的人工拆模台,拆模设备还包括试模推出机构,试模推出机构用于将输送机上的试模顶推至人工拆模台上。
15、进一步地,在第一方向上,所述拆模装置、人工拆模台均位于所述空试模储存设备的一侧。
16、进一步地,所述插捣装置固设于所述第一机器人上。
17、进一步地,所述插捣装置包括固定在第一机器人上的基座,基座上安装有四个插捣单元,各插捣单元均包括弹性插捣片,各插捣单元的弹性插捣片绕上下延伸的中心轴线圆周阵列排布,插捣单元还包括伸缩件,伸缩件用于驱动对应的弹性插捣片在弹性插捣片所在的平面内上下往复移动;
18、弹性插捣片的下端为插入混凝土中的插入端,各弹性插捣片所在的平面与所述中心轴线呈设定的夹角分布,各弹性插捣片均由上向下且朝相互背离的方向倾斜布置,弹性插捣片的插入端用于倾斜地顶在试模的内壁上并向下弯折。
19、进一步地,所述基座包括固定座体以及沿所述中心轴线的延伸方向滑动装配在固定座体上的滑动座体,各插捣单元均固设于所述滑动座体上;
20、滑动座体、固定座体之间设有弹性件,弹性件用于对滑动座体施加朝下的弹性力。
21、进一步地,所述空试模储存设备包括支撑架以及设于支撑架上的试模支架,试模支架用于存放试模,试模支架沿第一方向延伸且朝向布料设备的一端低于另一端,以使试模可在自重下滑动;试模支架中较低的一端由低向高依次具有抓取位、第一预备位、第二预备位,抓取位和第一预备位之间具有抓取间隔以供第一机器人抓取试模,试模支架上较低的一端设有用于与试模挡止配合的挡板;
22、空试模储存设备还包括位于试模支架上方的挡止模组,挡止模组包括可上下伸缩的第一挡止件和第二挡止件,第一挡止件用于与第一预备位上试模的上端外壁挡止配合,以防止第一预备位上的试模向下滑动;第二挡止件用于与第二预备位上的试模的上端内壁挡止配合,以防止第二预备位上的试模向下滑动;
23、第二挡止件向下伸出并与第二预备位上的试模挡止配合时,第一挡止件向上缩回以供第一预备位上的试模向下滑动至抓取位,第一挡止件向下伸出后第二挡止件向上缩回以供第二预备位上的试模向下滑动至第一预备位并与所述第一挡止件挡止配合。
24、进一步地,所述挡止模组还包括固定在试模支架上的安装架体,安装架体上活动装配有可在第一方向上往返运动的滑座和与滑座传动连接的驱动气缸,滑座上设有沿第二方向间隔且布置方向相对的导向轨道,安装架体上对应每个导向轨道的位置设有可上下活动的导向杆,导向杆与所述导向轨道在第一方向上导向滑动配合,第一挡止件和第二挡止件分别固定在对应导向杆的底端;每根导向杆外均套接有压缩弹簧,压缩弹簧与安装架体固定连接,导向轨道上设有高度不同的第一水平导向部和第二水平导向部,还设有连接第一水平导向部和第二水平导向部的倾斜导向部,以使滑座在往返运动时实现第一挡止件和第二挡止件的上下交替伸出和缩回。
25、进一步地,所述第一挡止件、第二挡止件均为挡止气缸。
技术特征:
1.一种混凝土自动化成型系统,其特征在于,包括:
2.根据权利要求1所述的混凝土自动化成型系统,其特征在于,拆模设备(600)包括用于沿第一方向输送试模的输送机以及拆模装置(609),所述码垛机(502)用于将立库(501)中的试模(903)放至输送机上,混凝土自动化成型系统还包括第二机器人(800),第二机器人(800)用于将输送机上的试模(903)放至拆模装置(609)上。
3.根据权利要求2所述的混凝土自动化成型系统,其特征在于,拆模设备(600)还包括位于输送机侧部的人工拆模台(602),拆模设备(600)还包括试模推出机构(603),试模推出机构(603)用于将输送机上的试模(903)顶推至人工拆模台(602)上。
4.根据权利要求3所述的混凝土自动化成型系统,其特征在于,在第一方向上,所述拆模装置(609)、人工拆模台(602)均位于所述空试模储存设备(700)的一侧。
5.根据权利要求1-4中任意一项所述的混凝土自动化成型系统,其特征在于,所述插捣装置(404)固设于所述第一机器人(402)上。
6.根据权利要求5所述的混凝土自动化成型系统,其特征在于,所述插捣装置(404)包括固定在第一机器人(402)上的基座(406),基座(406)上安装有四个插捣单元(407),各插捣单元(407)均包括弹性插捣片(410),各插捣单元(407)的弹性插捣片(410)绕上下延伸的中心轴线圆周阵列排布,插捣单元(407)还包括伸缩件,伸缩件用于驱动对应的弹性插捣片(410)在弹性插捣片(410)所在的平面内上下往复移动;
7.根据权利要求6所述的混凝土自动化成型系统,其特征在于,所述基座(406)包括固定座体(411)以及沿所述中心轴线的延伸方向滑动装配在固定座体(411)上的滑动座体(412),各插捣单元(407)均固设于所述滑动座体(412)上;
8.根据权利要求1-4中任意一项所述的混凝土自动化成型系统,其特征在于,所述空试模储存设备(700)包括支撑架(701)以及设于支撑架(701)上的试模支架(702),试模支架(702)用于存放试模(903),试模支架(702)沿第一方向延伸且朝向布料设备(300)的一端低于另一端,以使试模(903)可在自重下滑动;试模支架(702)中较低的一端由低向高依次具有抓取位、第一预备位、第二预备位,抓取位和第一预备位之间具有抓取间隔以供第一机器人(402)抓取试模(903),试模支架(702)上较低的一端设有用于与试模(903)挡止配合的挡板(707);
9.根据权利要求8所述的混凝土自动化成型系统,其特征在于,所述挡止模组还包括固定在试模支架(702)上的安装架体(712),安装架体(712)上活动装配有可在第一方向上往返运动的滑座(717)和与滑座(717)传动连接的驱动气缸(716),滑座(717)上设有沿第二方向间隔且布置方向相对的导向轨道,安装架体(712)上对应每个导向轨道的位置设有可上下活动的导向杆,导向杆与所述导向轨道在第一方向上导向滑动配合,第一挡止件和第二挡止件分别固定在对应导向杆的底端;每根导向杆外均套接有压缩弹簧(722),压缩弹簧(722)与安装架体(712)固定连接,导向轨道上设有高度不同的第一水平导向部(719)和第二水平导向部(720),还设有连接第一水平导向部(719)和第二水平导向部(720)的倾斜导向部(721),以使滑座(717)在往返运动时实现第一挡止件和第二挡止件的上下交替伸出和缩回。
10.根据权利要求8所述的混凝土自动化成型系统,其特征在于,所述第一挡止件、第二挡止件均为挡止气缸。
技术总结
本发明涉及一种混凝土自动化成型系统,包括储料设备、搅拌设备、布料设备、振动插捣设备、试模养护设备、拆模设备、空试模储存设备,在第一方向上,所述储料设备、试模养护设备、拆模设备、空试模储存设备位于布料设备的同一侧;试模养护设备包括立库和码垛机,振动插捣设备包括将振动插捣后的试模放至码垛机待抓取位置的第一机器人,第一机器人还用于将空的试模放至振动插捣设备的振动台上。各工序自身以及各工序之间的衔接均实现自动化操作,降低了人工参与程度,劳动强度更低。而且储料设备、布料设备、拆模设备围绕立库进行布置,方便进行布料和试块拆出后的转运。
技术研发人员:李鹏举,徐铜鑫,胡鹏辉,崔鹏飞,周振兴,敬海鑫,张平萍
受保护的技术使用者:中钢集团郑州金属制品研究院股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!