一种砌筑机器人系统的砌筑模块的制作方法
本发明涉及砌筑模块,具体为一种砌筑机器人系统的砌筑模块。
背景技术:
1、目前,砌体砌筑以手工和传统砌筑工具的使用为主,现场作业的建筑工人需要消耗过重的体力,产生严重的健康伤害;砌筑机器人的使用由于成本和技术的要求还没有得到推广和使用。特别地,传统砌筑工具主要是用于测量、校准和抹灰等,而砌筑好砌体还需要大量无谓的体力消耗,这影响到砌筑质量和工期。同时,绿色低碳生活要求人们在工作生活中减少能耗和废气废物的排放,建筑砌体砌筑机器人的砌筑模块从设计视角考虑设计一种省力机构和精确的定位机构,特别是很容易实现机器人的操作,由此可以帮助建筑工人摆脱严重污染的工作环境和繁重的体能消耗,提高生产效率和相续延长工作时间,实现工期的缩短。
技术实现思路
1、针对上述存在的技术不足,本发明的目的是提供一种砌筑机器人系统的砌筑模块,其可以用于现场工人省力精准的手工操作,又可以与机器人系统整合,实现智能化机器砌筑。
2、为解决上述技术问题,本发明采用如下技术方案:
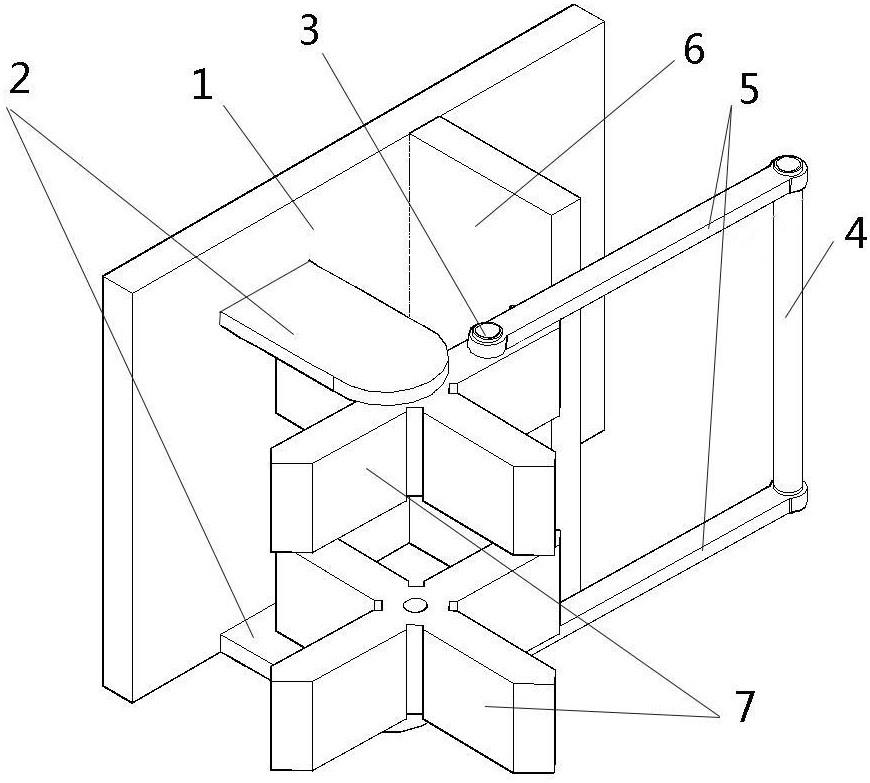
3、本发明提供一种砌筑机器人系统的砌筑模块,其特征在于,包括机座、连杆、v型定位块和抬放杆;
4、所述机座上靠近两侧位置分别安装一个侧支承座,两个v型定位块分别可转动的安装在两个侧支承座上;
5、两根连杆一端分别通过活动铰链、锁止销和两个v型定位块连接;两根连杆的另一端通过抬放杆连接;两个连杆的下方设置有横支承,横支承安装在机座上。
6、优选地,所述v型定位块整体为x型结构
7、本发明的有益效果在于:1、可以同时实现省力和定位,可以很容易地与机器人系统实现整合,机构简单,使用方便,可以提高建筑工人的工作效率和有效工作时间;
8、2、基于远程控制的砌筑机器人砌筑模块可以使建筑工人远离污染严重的工作现场,有利于工人的身体健康。
技术特征:
1.一种砌筑机器人系统的砌筑模块,其特征在于,包括机座、连杆、v型定位块和抬放杆;
2.根据权利要求1所述的一种砌筑机器人系统的砌筑模块,其特征在于,所述v型定位块整体为x型结构。
技术总结
本发明公开了一种砌筑机器人系统的砌筑模块,包括机座、连杆、V型定位块和抬放杆;所述机座上靠近两侧位置分别安装一个侧支承座,两个V型定位块分别可转动的安装在两个侧支承座上;两根连杆一端分别通过活动铰链、锁止销和两个V型定位块连接;两根连杆的另一端通过抬放杆连接;两个连杆的下方设置有横支承,横支承安装在机座上。本发明可以同时实现省力和定位,可以很容易地与机器人系统实现整合,机构简单,使用方便,可以提高建筑工人的工作效率和有效工作时间;实现基于远程控制的砌筑机器人砌筑模块可以使建筑工人远离污染严重的工作现场,有利于工人的身体健康。
技术研发人员:马洪波,任艳武,杨光,张宇,李东平,李兆华
受保护的技术使用者:马洪波
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!